




Flywoo GOKU GM10 Nano V3 GPS-Modul mit Kompass, M10050 GNSS, 2,6g, 12x17x5mm, 6-Pin
Flywoo GOKU GM10 Nano V3 GPS-Modul mit Kompass, M10050 GNSS, 2,6g, 12x17x5mm, 6-Pin
FLYWOO
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Das Flywoo GOKU GM10 Nano V3 ist ein Nano-GPS-Modul mit Kompass, das für leichte FPV/RC-Bauten entwickelt wurde. Es verfügt über einen 2,6 g Nano-Formfaktor, einen 6-poligen Pad-Anschluss und ein Plug-and-Play-Kabel für die Installation ohne Löten.
Basierend auf den bereitgestellten Informationen verwendet die GM10 V3-Serie den neuesten M10050 GNSS-Chip für eine schnellere Satellitensuche im Vergleich zur vorherigen GM8 V2. Für Hilfe bei der Einrichtung oder Fragen zur Kompatibilität kontaktieren Sie [email protected] or besuchen https://rcdrone.top/.
Hauptmerkmale
- Nano-Größe und geringes Gewicht: 2,6 g
- Integrierter Kompass
- Plug and Play (kein Löten erforderlich)
- 6-poliger Pad-Anschluss
- GPS-Modul. Drei Module.
Kompatibilitätsnotizen
- Hinweis: Der Chip des GOKU GM10 V3 GPS wird in der bereitgestellten Notiz als M1005 bezeichnet. Nur die Betaflight (BF) 4.3.x Firmware kann das Ublox Protokoll verwenden. BF 4.2.x und früher können nur das NMEA Protokoll verwenden. Die Notiz besagt, dass es keinen Leistungsunterschied zwischen den beiden Protokollen gibt.
- BETAFLIGHT: verwenden Sie Firmware über 4.3.0.
- INAV: verwenden Sie den neuesten 6.0.0 Konfigurator, und Firmware über 5.0.0.
Technische Daten
| Marke | FLYWOO |
| Modell | GM10 NANO V3 GPS mit Kompass |
| Abmessungen | 12mm*17mm*5mm |
| Gewicht | 2.6g |
| Stecker | 6-Pin Pad |
| Chipset | M10050 (Zehnte Generation Chip) |
| Empfangsformat | GPS, GLONASS, Galileo, BeiDou, QZSS und SBAS |
| Standardprotokoll | GPS, Galileo, BeiDou |
| Frequenz | GPS L1, GLONASS L1, BeiDou B1, SBAS L1, Galileo E1 |
| Kanäle | 72 Suchkanäle |
| Empfindlichkeit (Tracking) | -162dBm |
| Empfindlichkeit (Wiedererfassung) | -160dBm |
| Unterstützungsrate | 4800bps bis 921600bps (Standard 115200bps) |
| Datenlevel | TTL oder RS-232 (Standard TTL-Level) |
| Datenprotokoll | BF4.3.X (UBLOX) / BF4.2.X (NMEA) |
| Ausgangsfrequenz | 1Hz-10Hz (Standard 10Hz) |
| Betriebsgrenze (Höhe) | 50.000m Max |
| Betriebsgrenze (Geschwindigkeit) | 500m/s Max |
| Betriebsgrenze (Beschleunigung) | Weniger als 4g |
| VCC | DC-Spannung: 3.3-5V |
| Betriebstemperatur | -40 °C ~ +85°C |
| Lagertemperatur | -40°C ~ +105°C |
| Anzeige | PPS LED: ROT. Die PPS LED leuchtet, wenn das GPS nicht fixiert ist, und erlischt, wenn es fixiert ist. |
| Modul-Pins (Text) | RX, TX, 3.3-5V, GND |
| Kompass/GPS-Pad-Bezeichnungen (Diagramm) | T, R, G, V, C, D |
| Flugcontroller-Pad-Bezeichnungen (Diagramm) | TX, RX, GND, 5V, SCL, SDA |
| GM10 NANO V3 (KOMPASS) Bezeichnung (Diagramm) | SD-SC-V-G-RX-TX |
Bedienungsanleitung
Kompassrichtungsoptionen (angezeigt)
- Standard
- Uhrzeigersinn 0°
- Uhrzeigersinn 90°
- Uhrzeigersinn 180°
- Uhrzeigersinn 270°
- Uhrzeigersinn 0° Flip
- Uhrzeigersinn 90° Flip
- Uhrzeigersinn 180° Flip
- Uhrzeigersinn 270° Flip
- Benutzerdefiniert
Betaflight GPS und GPS-Rettungsmodus-Einstellungen (angezeigt)
- Öffnen Sie den seriellen Port: GPS / 115200 Baudrate.
- Schalten Sie den GPS-Schalter ein und stellen Sie das UBLOX/NMEA Protokoll ein.
- Stellen Sie den RXLOSS Steuerungsrettungsmodus-Kanal ein (Beispiel gezeigt: AUX 2 GPS RETTUNG, Wert 2000).
- Wählen Sie die Option für den GPS-Rettungsmodus (Beispielwerte angezeigt): Winkel 32; Starthöhe (Meter) 50; Abstand beim Abstieg (Meter) 200; Minimale Entfernung zum Heimatort (Meter) 100; Boden Geschwindigkeit (Meter/Sekunde) 20.00; Throttle Minimum 1100; Throttle Maximum 1600; Throttle Schweben 1280; Steiggeschwindigkeit (Meter/Sekunde) 5.00; Sinkgeschwindigkeit (Meter/Sekunde) 1.50; Minimale Satelliten 5; Höhenmodus Maximale Höhe; Sanity Checks Ein.
Was ist enthalten
- 1x GM10 NANO V3 GPS mit Kompass
- 1x 100mm Kabel
- 1x Kupferfolie
Details
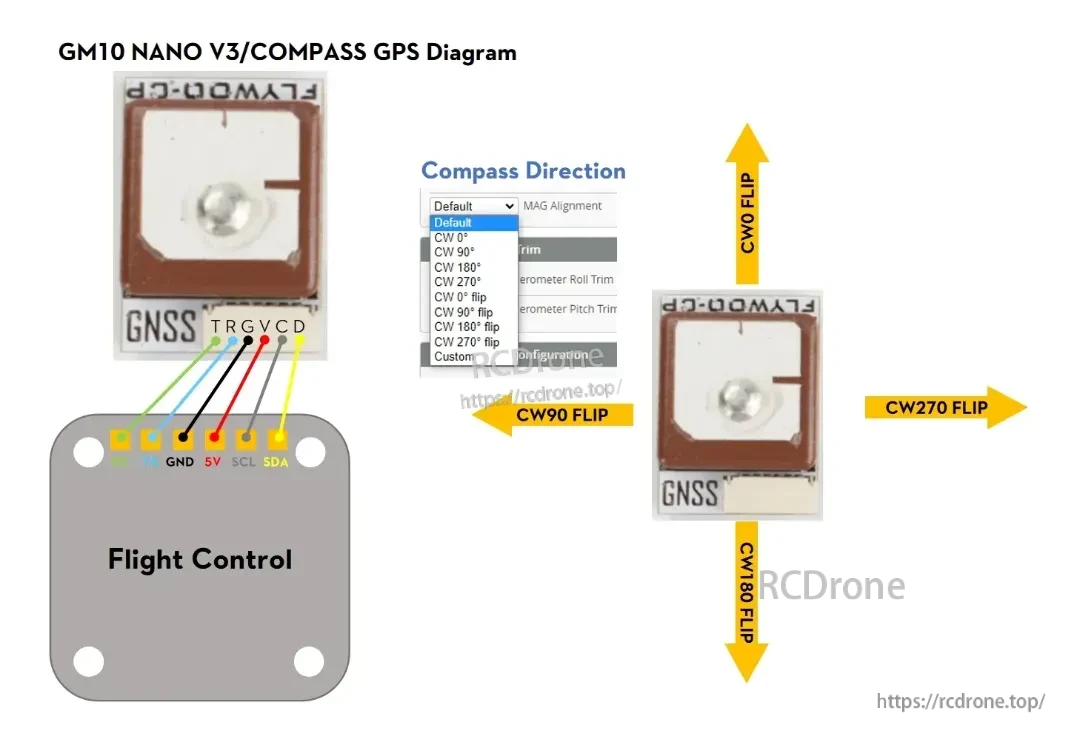
Die Verkabelung des GM10 Nano V3 GPS verwendet TX/RX sowie 5V und I2C (SCL/SDA), mit Kompassrichtungsoptionen für verschiedene Modulorientierungen.

Das Flywoo GOKU GM10 Nano V3 GPS wird mit 5V und GND-Strom sowie UART TX/RX an den Flugcontroller angeschlossen, mit optionalem SDA/SCL für den Kompass.

Das Flywoo GOKU GM10 Nano V3 GPS ist für eine schnellere Satellitensuche ausgelegt und unterstützt das Tracking von über 30 Satelliten.

Stellen Sie den GPS-Seriellen Port auf 115200 Baud ein und aktivieren Sie den GPS-Schalter mit dem UBLOX/NMEA-Protokoll für die Einrichtung des Rettungsmodus.

Der GPS-Rettungsmodus kann eingerichtet werden, indem ein AUX-Kanal für GPS RETTUNG zugewiesen und die Rückkehrparameter in Betaflight angepasst werden.
Related Collections




