



SteadyWin DD4015 Motor 24V RS485/CAN Absolut-Encoder 14bit 0,25 N.M 125 U/min 114g -20~80℃
SteadyWin DD4015 Motor 24V RS485/CAN Absolut-Encoder 14bit 0,25 N.M 125 U/min 114g -20~80℃
SteadyWin
Normaler Preis
$152.00 USD
Normaler Preis
Verkaufspreis
$152.00 USD
Grundpreis
pro
Inkl. Steuern.
Versand wird beim Checkout berechnet
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der SteadyWin DD4015 Motor ist ein kompakter Motor mit RS485 / CAN Kommunikation und einem einstufigen absoluten Encoder (14bit). Er ist für den Betrieb mit 24V Nennspannung (10~28V Bereich) spezifiziert und eignet sich für die Ansteuerung von Robotik, wo eine geschlossene Regelung der Positionsrückmeldung erforderlich ist.
Hauptmerkmale
- Kommunikation: RS485 / CAN
- Encoder: Einstufig absolut, 14bit Auflösung
- Nennmoment: 0.25 N.M; Spitzenmoment: 0.35 N.m
- Nennspeed: 125 U/min; max. Leerlaufdrehzahl: 1013 U/min
Technische Spezifikationen
| Parameter | Wert |
|---|---|
| Nennspannung | 24V |
| Spannungsbereich | 10~28V |
| Nennstrom | 1.2A |
| Nennleistung | 28.8W |
| Nennmoment | 0.25N.M |
| Nennspeed | 125 U/min |
| Leerlaufmaximalgeschwindigkeit | 1013 U/min |
| Spitzenmoment | 0.35 N.m |
| Spitzenstrom | 1.85A |
| Geschwindigkeitskonstante | 42.21 U/min/V |
| Drehmomentkonstante | 0.17 N.M/A |
| Anzahl der Polpaare | 11 Paare |
| Phasenwiderstand | 12.57Ω |
| Phaseninduktivität | 2.48Mh |
| Kommunikation | RS485 / CAN |
| Encoder-Typ | Einmal-Drehung absolut |
| Auflösung | 14bit |
| Motorgewicht | 114g |
| Arbeitstemperatur | -20~80℃ |
Mechanisch / Installation (aus Zeichnung)
- Modellkennzeichnung: DD4015
- Äußerdurchmesser: Ø40 ±0.1
- Gesamtlänge: 33 ±0.1
- Längensegmente: 12.4 und 20.1
- Wellen-Durchmesser: Ø5
- Vorderseitiges Muster: Ø20; 4-M3 (Tiefe ▽3); Ø13.6 (+0.05/0) (Tiefe ▽2); Ø12.6 (+0.1/0) (Tiefe ▽12)
- Rückseitiges Muster: Ø33; 4-M3 (Tiefe ▽4.5)
- Stecker: SH1.0-8PIN
- SH1.0-8PIN Signale: 485_A, 485_B, CAN_H, CAN_L, GND, GND, VCC, VCC
Anwendungsszenarien
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadrupedale Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Dokumente
Für Verkabelung, Integration oder Bestellhilfe kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Details
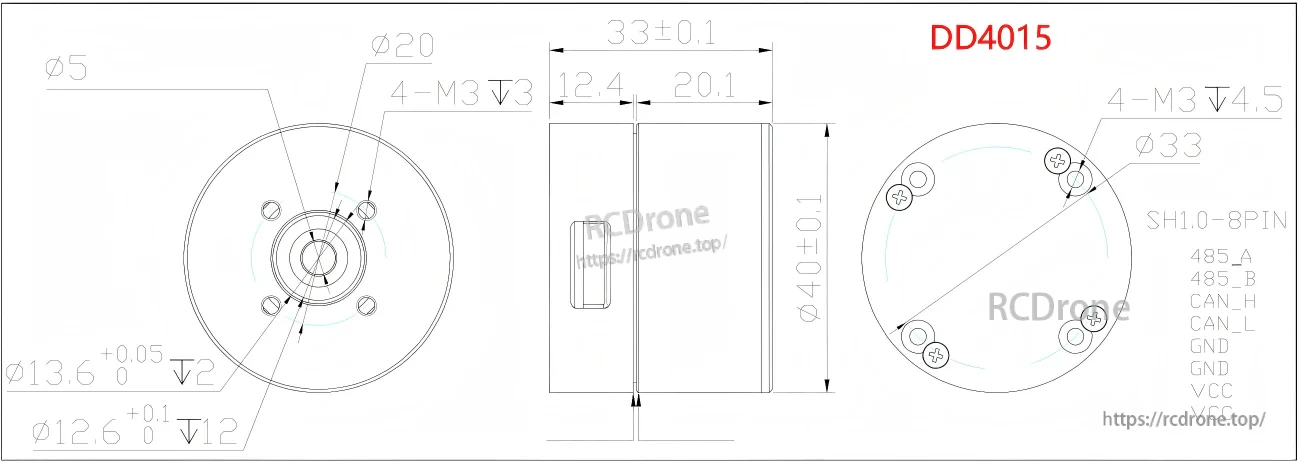
Mechanische Abmessungen und Montagemuster für den DD4015 sowie das Pinout des SH1.0 8-poligen Steckers für RS485 und CAN Verkabelung.
Related Collections



