




SteadyWin GB3510 Motor 12V 0,11 N·m 363U/min, AS5048A/AS5600 Encoder-Typ, 12/14-Bit Kompatibel
SteadyWin GB3510 Motor 12V 0,11 N·m 363U/min, AS5048A/AS5600 Encoder-Typ, 12/14-Bit Kompatibel
SteadyWin
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
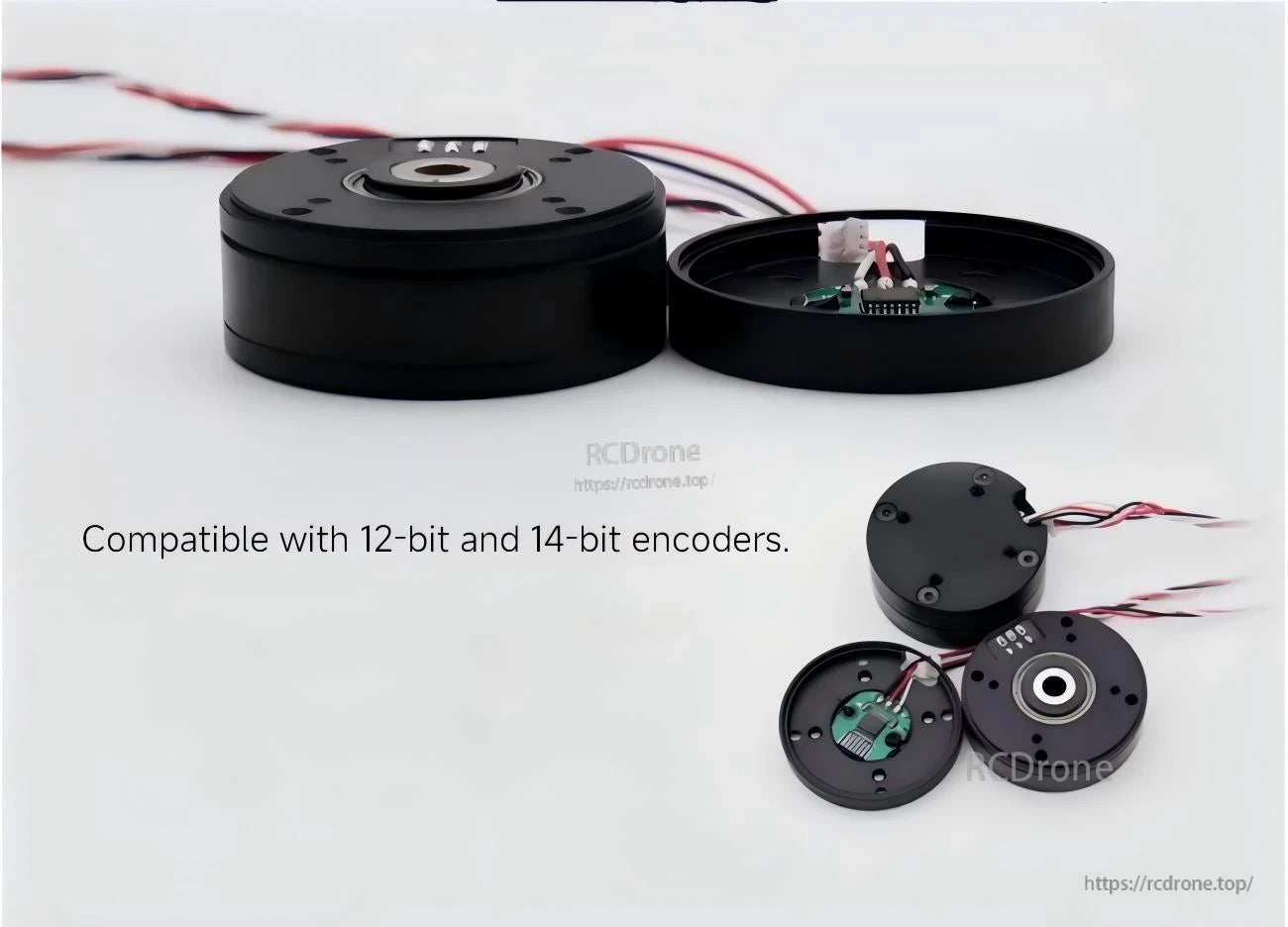
Der SteadyWin GB3510 Motor ist ein kompakter Motor, der für den Betrieb mit 12V ausgelegt ist und für Robotik- und Bewegungssteuerungsanwendungen konzipiert wurde. Er unterstützt Encoder-Optionen AS5048A/AS5600 und ist angegeben, mit 12-Bit- und 14-Bit-Encodern kompatibel zu sein.
Hauptmerkmale
- Modell: GB3510
- Encoder-Typ: AS5048A / AS5600
- Kompatibel mit 12-Bit- und 14-Bit-Encodern
- Kompatibel mit Schleifringen; angegeben, dass er häufig in Gimbals und Pods verwendet wird und bei niedrigen Geschwindigkeiten stabil ist
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Technische Daten
| Modell | GB3510 |
| Nennspannung | 12V |
| Nennmoment | 0.11 N·m |
| Nennspeed | 363 U/min |
| Maximalgeschwindigkeit | 965 U/min |
| Nennstrom | 0.53 A |
| Stillstandsdrehmoment | 0.16 N·m |
| Stillstandsstrom | 0.8 A |
| Phasenwiderstand | 8.8 Ω |
| Wicklungen des Motors | 40T |
| Phaseninduktivität | 3.95Mh |
| Geschwindigkeitskonstante | 45 U/min/V |
| Drehmomentkonstante | 0.2N.M/A |
| Rotormasse | 81gcm^2 |
| Anzahl der Polpaare | 11Paare |
| Motorgewicht ohne Encoder | 76g |
| Motorgewicht mit Encoder | 89g |
| Arbeitstemperatur | 20~80 °C |
| Maximale Entmagnetisierungstemperatur | 120 °C |
| Encoder-Typ | AS5048A/AS5600 |
Mechanische Zeichnungsnotizen (aus dem Diagramm)
- Gezeigte Konfigurationen: mit Encodergehäuse / ohne Encodergehäuse
- Hinweise zum Lochmuster: 4-M3, 3-M2, 4-M2, 4-M2.5
- Gezeigte Durchmesser: φ25, φ30, φ40±0.05, φ20, φ12.6, φ33.5, φ16.6, φ38±0.05
- Gezeigte lineare Abmessungen: 25±0.2, 20±0.2, 19, 20.5, 16, 1, 0.5
Handbücher / CAD-Dateien
Bei Integrationsfragen (Encoder-Auswahl, Verkabelung oder mechanische Passform) kontaktieren Sie den Support unter [email protected] or besuchen https://rcdrone.top/.
Details
Wählen Sie AS5048A oder AS5600 Encoder-Optionen mit 12-Bit/14-Bit-Kompatibilität für präzise Niedriggeschwindigkeitssteuerung in der Robotik.

Ein mit Schleifringen kompatibles Formfaktor unterstützt einen stabilen Betrieb bei niedrigen Geschwindigkeiten für Gimbals, Pods und Bewegungssteuerungsanwendungen.

Related Collections




