SteadyWin GIM4305-10 Planetengetriebemotor — 48W, 10:1 Übersetzung, 1 N·m Nenndrehmoment, 300–366 U/min, CAN, IP54 für Roboterantriebe
SteadyWin GIM4305-10 Planetengetriebemotor — 48W, 10:1 Übersetzung, 1 N·m Nenndrehmoment, 300–366 U/min, CAN, IP54 für Roboterantriebe
SteadyWin
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der SteadyWin GIM4305-10 Planetengetriebe-Motor ist ein kompakter Planetengetriebe-Motor mit integriertem SDC101-Treiber und CAN-Kommunikation. Entwickelt für präzise Betätigung, arbeitet das Gerät bei einer Nennspannung von 24V (Bereich 12-36V), liefert 48W Leistung und bietet ein Nennmoment von 1 N·m (Stillstandsmoment 3,47 N·m) nach einer 10:1 Reduktion. Der GIM4305-10 ist nach IP54 bewertet und unterstützt einen 14-Bit-Encoder sowie eine separate Encoder-Verbindung; individuelle Bremsunterstützung ist verfügbar. Eingebaute Schutzfunktionen umfassen Übertemperatur-, Überspannungs- und Überlastüberwachung.
Für Kundenservice und technischen Support kontaktieren Sie: [email protected] oder besuchen Sie https://rcdrone.top/.
Hauptmerkmale
- Planetengetriebe-Reduzierer, 10:1 Verhältnis für erhöhtes Ausgangsmoment und Positionskontrolle.
- Integrierter SDC101-Treiber mit CAN-Kommunikation für vernetzte Steuerung.
- Nenn-Drehzahl nach Reduktion 300 U/min, maximal 366 U/min.
- Encoder: 14-Bit eingebaut, unterstützt separate Encoder-Eingänge.
- Kompakte Hülle Ø53×26mm und geringes Gewicht (140g ohne Treiber; 150g mit Treiber).
- Mechanische Bewertungen: max. axiale Last 125N, max. radiale Last 500N, Zahnspiel 15 Bogenminuten.
- Betriebstemperaturbereich -20°C bis +80°C und akustischer Geräuschpegel <60 dB.
- Reduziergetriebe-Material: ALU oder STAHL. Individuelle Bremsenhalterung verfügbar.
Technische Daten
| Modell | GIM4305-10 |
| Treiber-Modell | SDC101 |
| Nennspannung | 24V (12-36V Bereich) |
| Leistung | 48W |
| Nennmoment (nach Reduzierung) | 1 N·m |
| Stillstandsmoment | 3.47 N·m |
| Nennspeed (nach Reduzierung) | 300 U/min |
| Maximale Geschwindigkeit (nach Reduzierung) | 366 U/min |
| Nennstrom | 2A |
| Stillstandsstrom | 5.6A |
| Phasenwiderstand | 1.15 Ω |
| Phaseninduktivität | 0.41 mH |
| Geschwindigkeitskonstante | 15.25 U/min/V |
| Drehmomentkonstante | 0.62 N·m/A |
| Anzahl der Polpaare | 14 Paare |
| Übersetzungsverhältnis | 10:1 |
| Getriebeart | Planeten |
| Material des Reduziergetriebes | ALU oder STAHL |
| Rücklauf des Reduziergetriebes | 15 Bogenminuten |
| Motorgewicht (ohne Treiber) | 140 g |
| Motorgewicht (mit Treiber) | 150 g |
| Größe (ohne Treiber) | Ø53×26 mm |
| Größe (mit Treiber) | Ø53×26 mm |
| Max. axiale Last | 125 N |
| Max. radiale Last | 500 N |
| Geräusch | <60 dB |
| Kommunikation | CAN |
| Zweiter Encoder | NEIN |
| Schutzgrad | IP54 |
| Betriebstemperatur | -20°C bis +80°C |
| Encoder-Auflösung | 14 Bit |
| Separate Encoder-Unterstützung | JA |
| Benutzerdefinierte Bremsunterstützung | JA |
Anwendungen
- Humanoide Roboter und robotische Gelenke
- Robotergreifer und Aktuierungsmodule
- Exoskelette und tragbare Hilfsgeräte
- Quadruped-Roboter und Beugelenke
- AGV-Antriebsmodule und mobile Robotik
- Open-Source-Roboterprojekte (e.g., Pupper V3 Integration)
Handbücher
- GIM4305-10SHS Installationsdiagramm (PDF)
- GIM4305 Motor Schnittstellenschema (PDF)
- SteadyWin_GIM4305_10.stp
Details
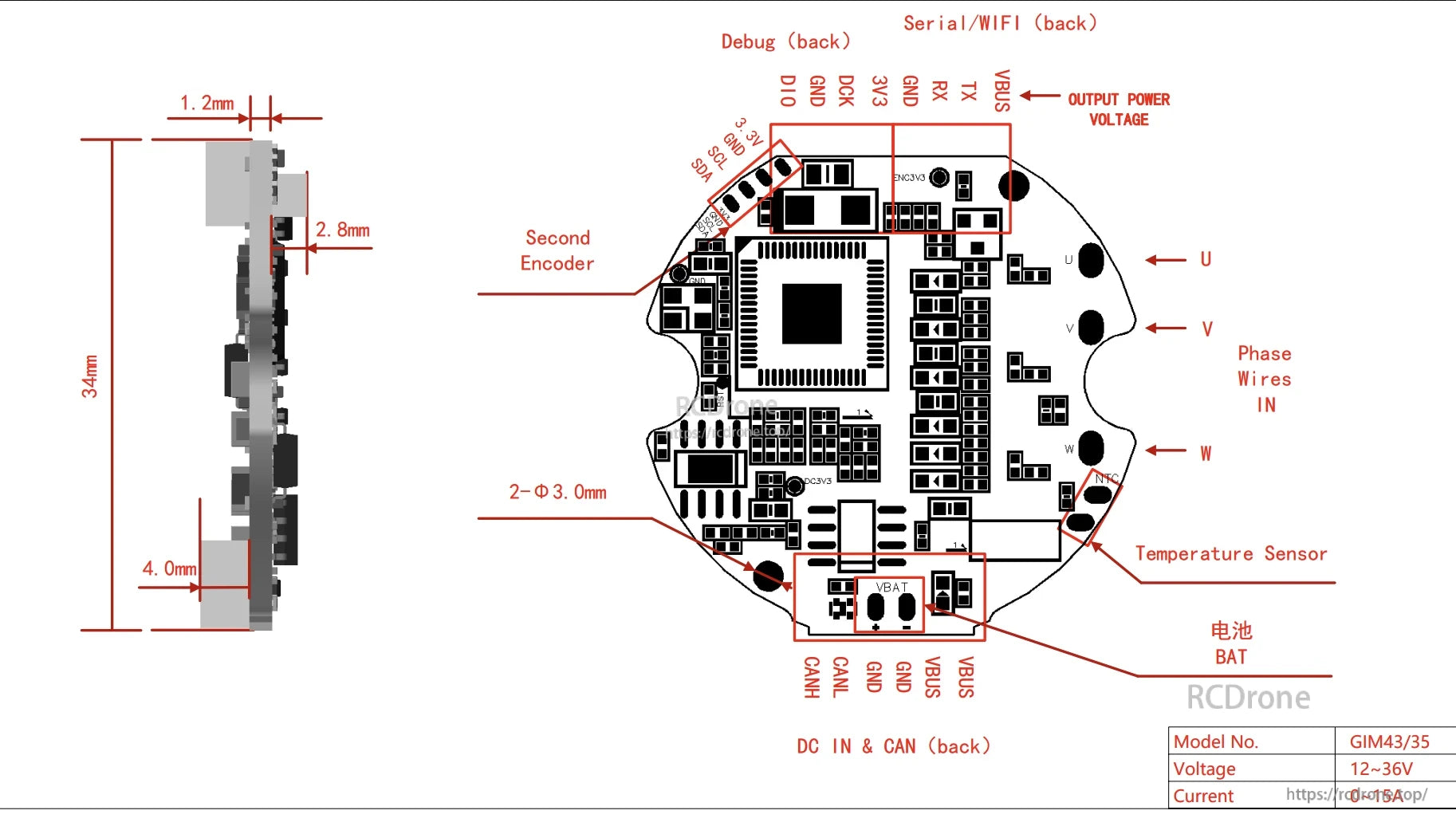
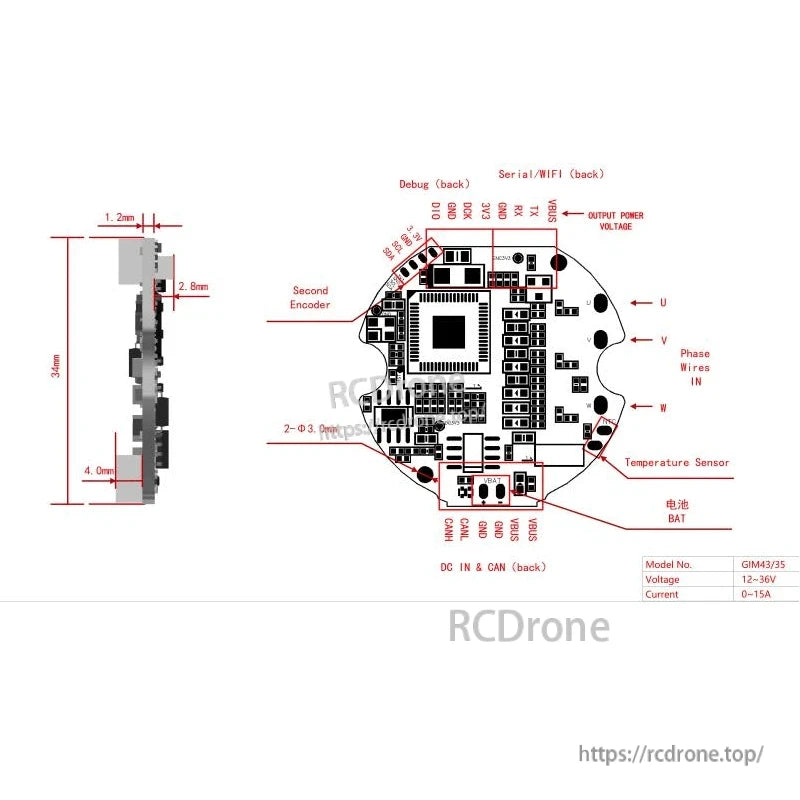
SteadyWin GIM43/35 Motor PCB-Diagramm zeigt Verbindungen, Abmessungen und Komponenten—Encoder, Phasenleitungen, Temperatursensor, Batterieeingang, Debug-Ports—betrieben bei 12–36V und 0–15A Strom.
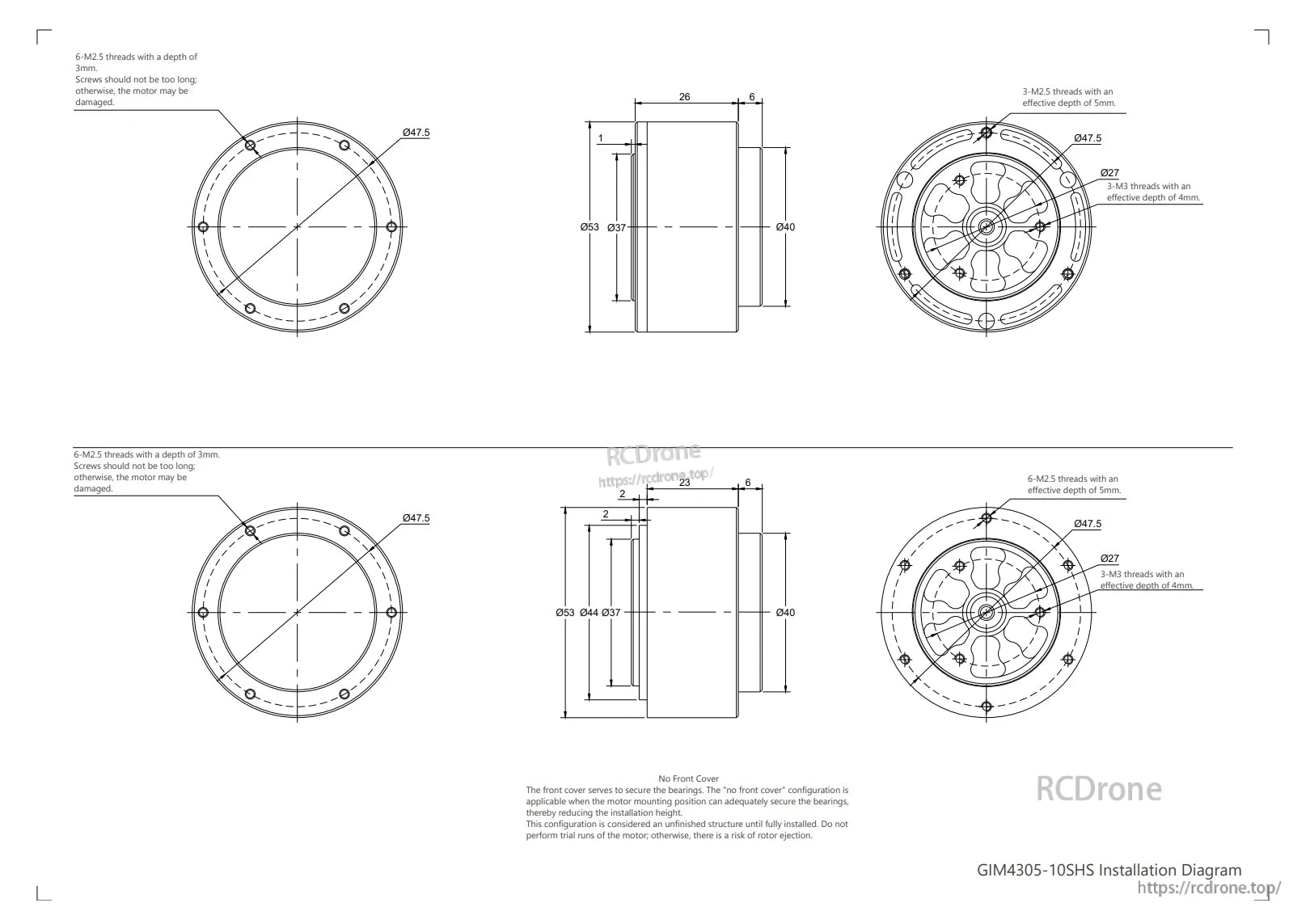
Technisches Diagramm für die GIM4305-10SHS Motorinstallation zeigt Abmessungen, Gewindespezifikationen, Schraubenlängenwarnungen zur Vermeidung von Schäden und Konfigurationen mit und ohne Frontabdeckung.
Related Collections