





SteadyWin PM120 Motor 36V 4 N·m 168U/min (330U/min max) mit AS5048A/AS5600 Encoder-Option
SteadyWin PM120 Motor 36V 4 N·m 168U/min (330U/min max) mit AS5048A/AS5600 Encoder-Option
SteadyWin
Normaler Preis
$173.00 USD
Normaler Preis
Verkaufspreis
$173.00 USD
Grundpreis
pro
Inkl. Steuern.
Versand wird beim Checkout berechnet
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der SteadyWin PM120 Motor ist ein 36V Motor, der für Robotik- und Mobilitätsplattformen entwickelt wurde, bei denen kontrollierte Geschwindigkeit und Drehmoment erforderlich sind. Er unterstützt Encoder-Optionen AS5048A/AS5600 für die Integration von Positions-/Geschwindigkeitsrückmeldungen.
Anwendungen
- Humanoide Roboter
- Robotergelenke
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Technische Daten
| Modell | PM120 |
| Nennspannung | 36V |
| Nennmoment | 4 N·m |
| Nennspeed | 168 U/min |
| Maximale Geschwindigkeit | 330 U/min |
| Nennstrom | 3,8 A |
| Stillstandsdrehmoment | 8.5 N·m |
| Stromaufnahme | 16 A |
| Wicklungen des Motors | 20T |
| Phasenwiderstand | 3 Ω |
| Phaseninduktivität | 2.23Mh |
| Geschwindigkeitskonstante | 9.2 U/min/V |
| Drehmomentkonstante | 1.03 N.M/A |
| Rotormasse | 4656 gcm^2 |
| Anzahl der Polpaare | 21Paare |
| Motorgewicht ohne Encoder | 1038 g |
| Motorgewicht mit Encoder | 1160 g |
| Maximale Entmagnetisierungstemperatur | 120 °C |
| Arbeitstemperatur | 20~80 °C |
| Encoder-Typ | AS5048A/AS5600 |
Mechanische Zeichnungsmaße (aus dem Installationsdiagramm)
- Gesamtdurchmesser: Ø120 ±0.05
- Äußerdurchmesser (Stufe): Ø62
- Äußerdurchmesser (Stufe): Ø44.8
- Bohrung/PCD-Markierung: Ø70
- Bohrung/PCD-Markierung: Ø36
- Befestigungsbohrungen: 8-M5 (im Diagramm markiert)
- Axiale Maße (im Diagramm markiert): 53 ±0.2, 46, 4, 3, 2
Für technische Unterstützung und Integrationsfragen kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Handbücher
PM120_installation_diagram.pdf
Details
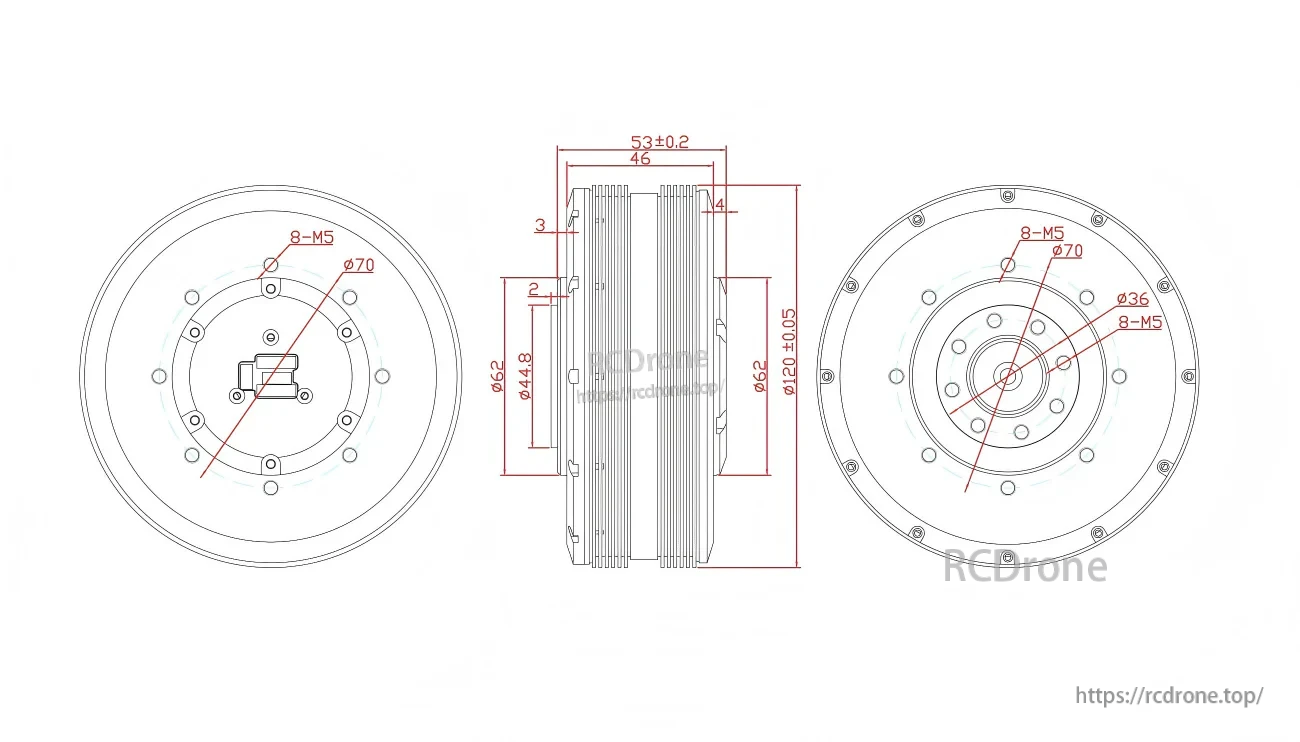
Montagehinweis für die Integration: Ø120 mm Gesamtdurchmesser mit 8×M5 Schraubenmuster und Ø70/Ø36 PCD-Optionen.
Related Collections





