STM32 Open Source Quadcopter DIY Kit – Laser Optical Flow Student Learning Board PCB + PID Parameter Debugging Rack
STM32 Open Source Quadcopter DIY Kit – Laser Optical Flow Student Learning Board PCB + PID Parameter Debugging Rack
RCDrone
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Der STM32 Selbstbau Open Source Quadrocopter Bausatz ist eine umfassende Lösung für Studenten, Hobbyisten und Entwickler, die praktische Erfahrung in Drohnenprogrammierung, Flugdynamik und Hardware-Entwicklung. Mit einem Mikrocontroller STM32F103C8T6, MPU6050 6-Achsen-Gyroskop, Und Funkmodul NRF24L01Dieser Quadrocopter ist mit modernsten Technologien für einen reibungslosen und stabilen Flug ausgestattet. Seine optische Flussstabilisierung kombiniert mit Luftdrucksensoren sorgt für eine präzise Höhenhaltung und Positionsverriegelung, während die Open-Source-C-Firmware ermöglicht es Benutzern, Flugalgorithmen zu ändern. Mit anpassbare IO-Ports, drahtlose PID-Parametereinstellungund Unterstützung für Sekundärentwicklung Mit Keil MDK5 bietet dieser Quadrocopter unübertroffene Vielseitigkeit für Anfänger und Fortgeschrittene. Ein leistungsstarker 3,7 V 1200 mAh Akku sorgt für bis zu 10 Minuten Flugzeit und das leichte 320 mm x 230 mm Rahmen ist auf Stabilität und Tragbarkeit ausgelegt. Das mitgelieferte PID-Debugging-Rack verbessert das Lernerlebnis zusätzlich und macht dieses Kit ideal für Bildungsprojekte, Wettbewerbe und Drohnen-Enthusiasten.
Hauptmerkmale
-
Präzision der Flugsteuerung:
- ausgestattet mit Mikrocontroller STM32F103C8T6 Und MPU6050-Gyroskop für zuverlässige Flugdynamik.
- Optisches Flussmodul (PMW3901) Und barometrischer Sensor (SPL06-001) ermöglichen eine präzise Positionshaltung und Höhenstabilisierung (20cm–400cm).
-
Open Source und Programmierbarkeit:
- Vollständig Open-Source-Firmware geschrieben in Standard C für eine einfache Sekundärentwicklung.
- Kompatibel mit Keil MDK5 Umgebung für fortgeschrittene Programmierprojekte.
-
Drahtlose Steuerung:
- Verfügt über ein Funkmodul NRF24L01 unterstützt eine Kontrolldistanz von 50 M+ in offenen Umgebungen.
- Kabellos PID-Parametereinstellung für die X-, Y- und Z-Achse vereinfacht die Flugoptimierung.
-
Robustes Hardware-Design:
- Robuster Rahmen mit 8520 Bürstenmotoren Und 13,5 cm Propeller für stabile Flüge im Innen- und Außenbereich.
- Leichtbauweise (100g inklusive Batterie) unterstützt Nutzlasten bis zu 60g, wodurch es für den Einbau von Sensoren oder Kameras geeignet ist.
-
Erweiterte Lerntools:
- Beinhaltet einen PID-Debugging-Rack zur Feinabstimmung der PID-Parameter.
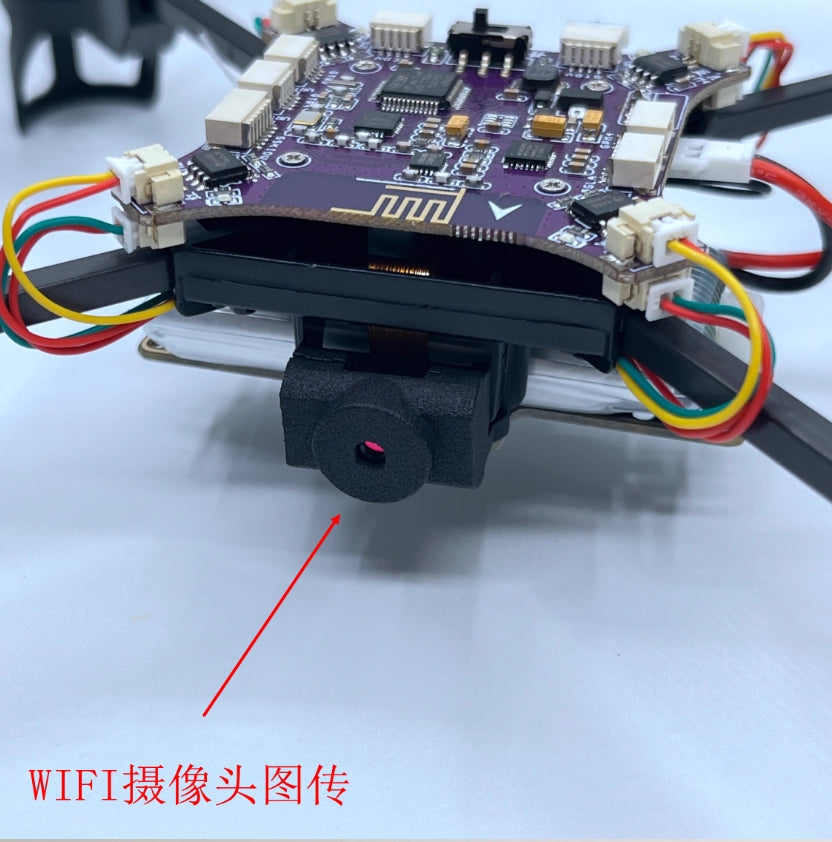
- Vorverlötete IO-Ports unterstützen Erweiterungen wie Wi-Fi-Kameraschnittstellen, SPI, UART, Und IIC-Module.
-
Leistungsstarkes Batteriesystem:
- Enthält 3,7 V, 380 mAh Und 3,7 V 1200 mAh Batterienund bietet Flugzeiten von 5 bis 10 Minuten abhängig von Nutzlast und Bedingungen.
- Eingebauter Schutz gegen Überladung und Entladung sorgt für die Sicherheit der Batterie.
-
Plug-and-Play-Verbindung:
- USB-HID-Anschluss für Echtzeit-Datenübertragung und Parameteranpassungen über die Computerschnittstelle.
- Einfach zu bedienende SWD-Programmierschnittstelle unterstützt sowohl J-Link Und ST-Link Debugger.
Technische Spezifikationen
Quadrocopter
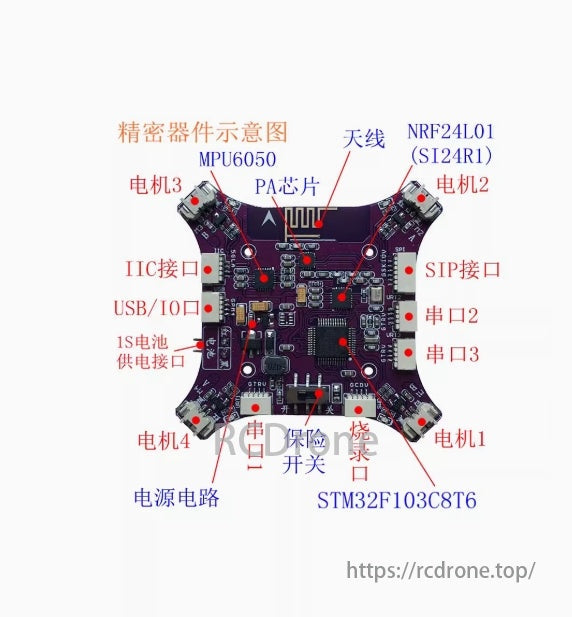
- Hauptchip: STM32F103C8T6
- Gyroskop: MPU6050 (6-Achsen)
- Drahtloses Modul: NRF24L01 (SI24R1)
- Motortreiber: AO3400 (A09T)
- Motoren: 8520 Bürstenmotoren
- Propeller: 13,5 cm (4 enthalten)
- Sensoren: SPL06-001 (Barometer), PMW3901 (optischer Fluss)
- Batterie: 3,7 V, 1200 mAh (10 Minuten Flug) + 3,7 V, 380 mAh (5 Minuten Flug)
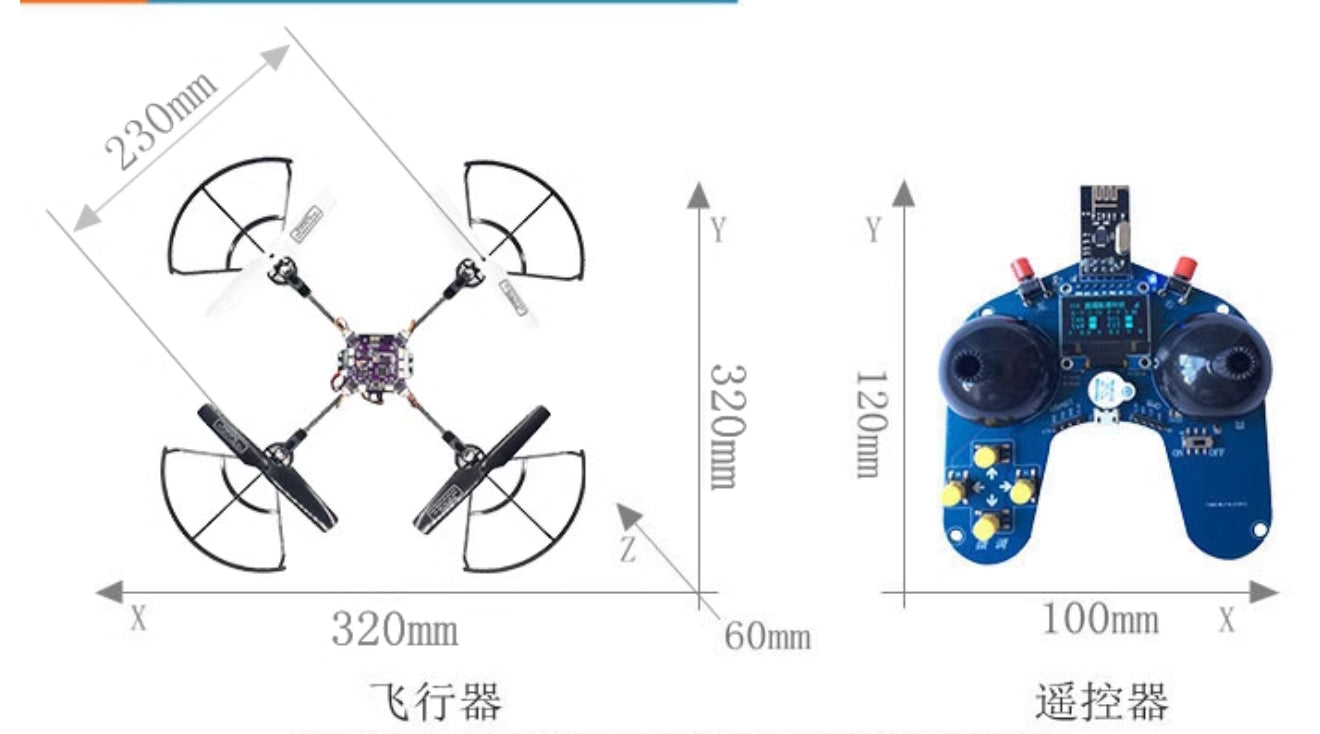
- Gewicht: 100g (inkl. Batterie)
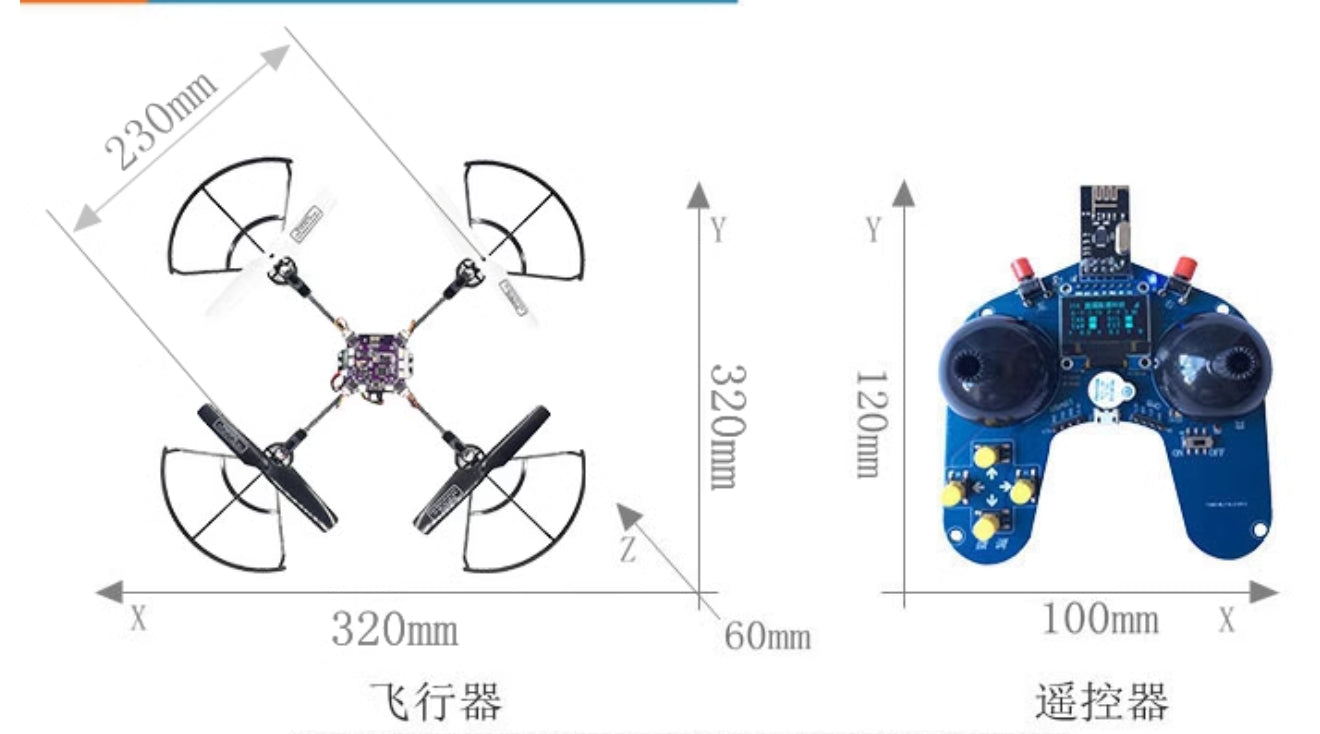
- Rahmengröße: 320 mm x 230 mm
- Zusätzliche Ports: SPI x1, UART x2, IIC x1, USB IO x1
- Nutzlastkapazität: 60g
Fernbedienung
- Hauptchip: STM32F103C8T6
- Drahtloses Modul: NRF24L01 (SI24R1)
- Anzeige: 0,96-Zoll-OLED
- Leistung: 3,7 V 380 mAh Akku
- Kontrolldistanz: >50m (offenes Feld)
- Größe: 12 cm x 10 cm
- Gewicht: 60g
- Zusätzliche Funktionen: Kalibrierungstasten, visualisierte PID-Tuning-Schnittstelle
Packungsinhalt
- Quadrocopter-Rahmen mit vormontierter Elektronik (STM32F103C8T6-basierter Flugcontroller, MPU6050, SPL06-001, PMW3901).
- STM32 Drahtlose Fernbedienung (mit OLED-Display und NRF24L01-Modul).
- Batterien:
- 1 x 3,7 V 1200 mAh Lithiumbatterie (Flugzeit 10 Minuten)
- 1 x 3,7 V 380 mAh Lithiumbatterie (Flugzeit 5 Minuten)
- Ersatzpropeller (4 Stück)
- USB-Ladekabel (3,7 V–4,2 V kompatibel)
- Überbrückungsdrähte (sortiert)
- Präzisionsschraubendreher
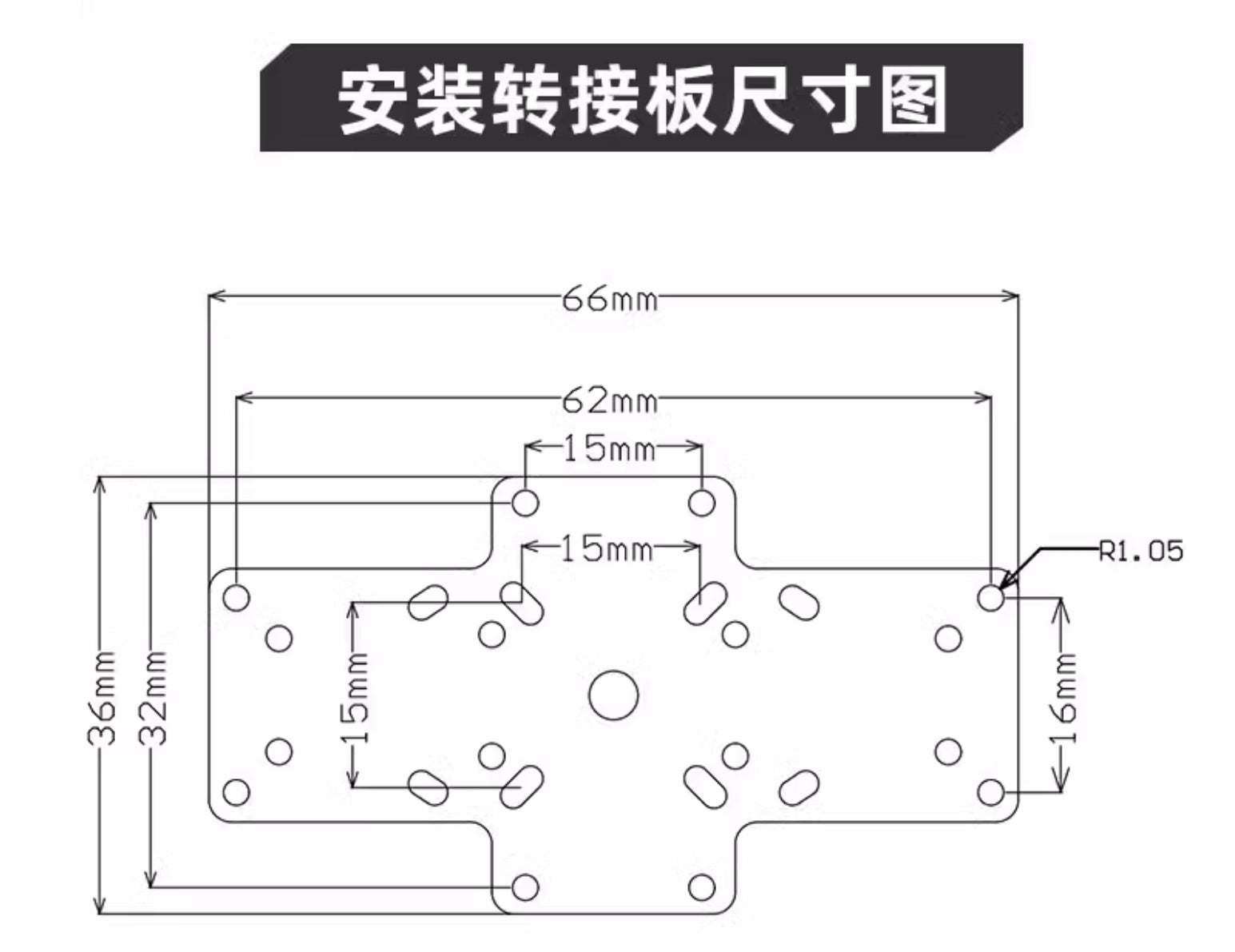
- PID-Debugging-Rack
- Ausführliches Benutzerhandbuch und Tutorials (PDF und Video).
Zusätzliche hervorgehobene Funktionen
- Präzise Komponentenplatzierung: Jedes gelötete Teil ist markiert, einschließlich der Anschlüsse für Stromversorgung, SPI, IIC, USB und Motoranschlüsse.
- Modulare Debugging-Tools: Der optische Fluss und die Platzierung des barometrischen Sensors gewährleisten präzise Flugdaten zur PID-Anpassung.
- Erweiterungen für Entwicklungsboards: Ermöglicht die Integration von Kameras und Sensoren für Luftbildfotografie und Videoaufzeichnung.
- Visualisierte Schnittstelle: Quadcopter-Daten werden zur Fehlerbehebung und Optimierung in Echtzeit über die PC-Software angezeigt.
Anwendungen:
- Für Bildungszwecke: Perfekt für MINT-Lernprojekte und Ingenieurkurse.
- Wettbewerbe: Ideal für DIY-Drohne Herausforderungen und Roboterwettbewerbe.
- Hobbyisten: Spannendes Projekt für Technikbegeisterte und Macher.
- Fortgeschrittene Entwicklung: Unterstützt sekundäre Entwicklung für benutzerdefinierte Anwendungen.
Sicherheitshinweis:
Sorgen Sie mit dem mitgelieferten Debugging-Rack für sichere Testbedingungen. Vermeiden Sie Flüge in überfüllten oder gefährlichen Bereichen. Befolgen Sie die Montageanweisungen und gehen Sie vorsichtig mit gelöteten Komponenten um.
Mit seinem modularen Design, der Open-Source-Flexibilität und den umfangreichen Lernressourcen ist das STM32 DIY Open Source Quadcopter Kit Ihr Einstieg in die Beherrschung der Drohnentechnologie und -programmierung.




Dies ist eine Leiterplattenbaugruppe für Fernsehsysteme mit STM3ZF103C8T6F-Chip, die für hochwertige Videoübertragung und -empfang ausgelegt ist.


OnF STM32F Blue Pill, 7 % i: STM32 Hochfrequenz BRB+, 10 Ohm x 7 HhJfV: STM32 Fernbedienung. Display: 0,96 Zoll OLED IM Et: 2,4C IMHM: ~20°C bis ~60°C JE+HFZ: >50x (Watt), EFt) 7ARh: 12 cm x 6 cm InLaR: 3,7 V, 380 mAh, Gewicht: 60 g
Related Collections