Ti5 CRA-RI50-70-PRO-XX Integriertes Robotergelenk – Harmonisches Getriebe, Hohlwelle, 24–48 V, 150 W, 17-Bit-Encoder, CAN/EtherCAT
Ti5 CRA-RI50-70-PRO-XX Integriertes Robotergelenk – Harmonisches Getriebe, Hohlwelle, 24–48 V, 150 W, 17-Bit-Encoder, CAN/EtherCAT
Ti5 Robot
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Der Ti5-Roboter CRA-RI50-70-PRO-XX ist ein kompaktes, hohlwellenintegriertes Robotergelenk, das eine Präzisions-Oberschwingungsreduzierer, rahmenloser Torquemotor, FOC-Laufwerk, Und Absolutwertgeber in einem Modul. Mit einem 80 mm Außendurchmesser, 10 mm Durchgangsloch, 150 W Leistung, Und 24–48 V liefert bis zu 34 N·m Spitze (verhältnisabhängig) mit nahezu spielfrei Und geringe GeräuschentwicklungDie Kommunikation ist wählbar zwischen DÜRFEN Und EtherCAT; Einzel- oder Doppelencoder und ein elektromagnetische Bremse Variante (-B) ist verfügbar. Dieses Gelenk ist für Cobots, mobile Manipulatoren, Schwenk-Neige-Kardanringe, Industrieanlagen, Leistungsinspektionsroboter und Schiffsplattformen konzipiert.
Hauptmerkmale
-
All-in-One-Verbindung: Oberschwingungsdämpfer + BLDC-Drehmomentmotor + FOC-Treiber + Absolutwertgeber in einem abgedichteten, kompakten Gehäuse.
-
Hohlwelle: 10 mm zentrale Durchführung für Kabel/Luftleitungen.
-
Hochpräzises Feedback: 17-Bit-Absolutwertgeber, Power-Off-Multiturn-Speicher; Einzel-/Doppel-Encoder Optionen.
-
Spielarmer Ausgang: harmonische Stufe mit ~10–20 Bogensekunden Spiel (pro Verhältnis).
-
Ruhig &Amp; glatt: Drehmomentmotor mit großer Polzahl für Stabilität bei niedriger Geschwindigkeit und geringe Geräuschentwicklung.
-
Schnittstellenoptionen: DÜRFEN oder EtherCAT Bus; optional Haltebremse (Modellzusatz -B).
-
Anpassbar: wasserdichte/niedrigtemperaturbeständige Versionen ab Werk verfügbar.
Modelle & Optionen
-
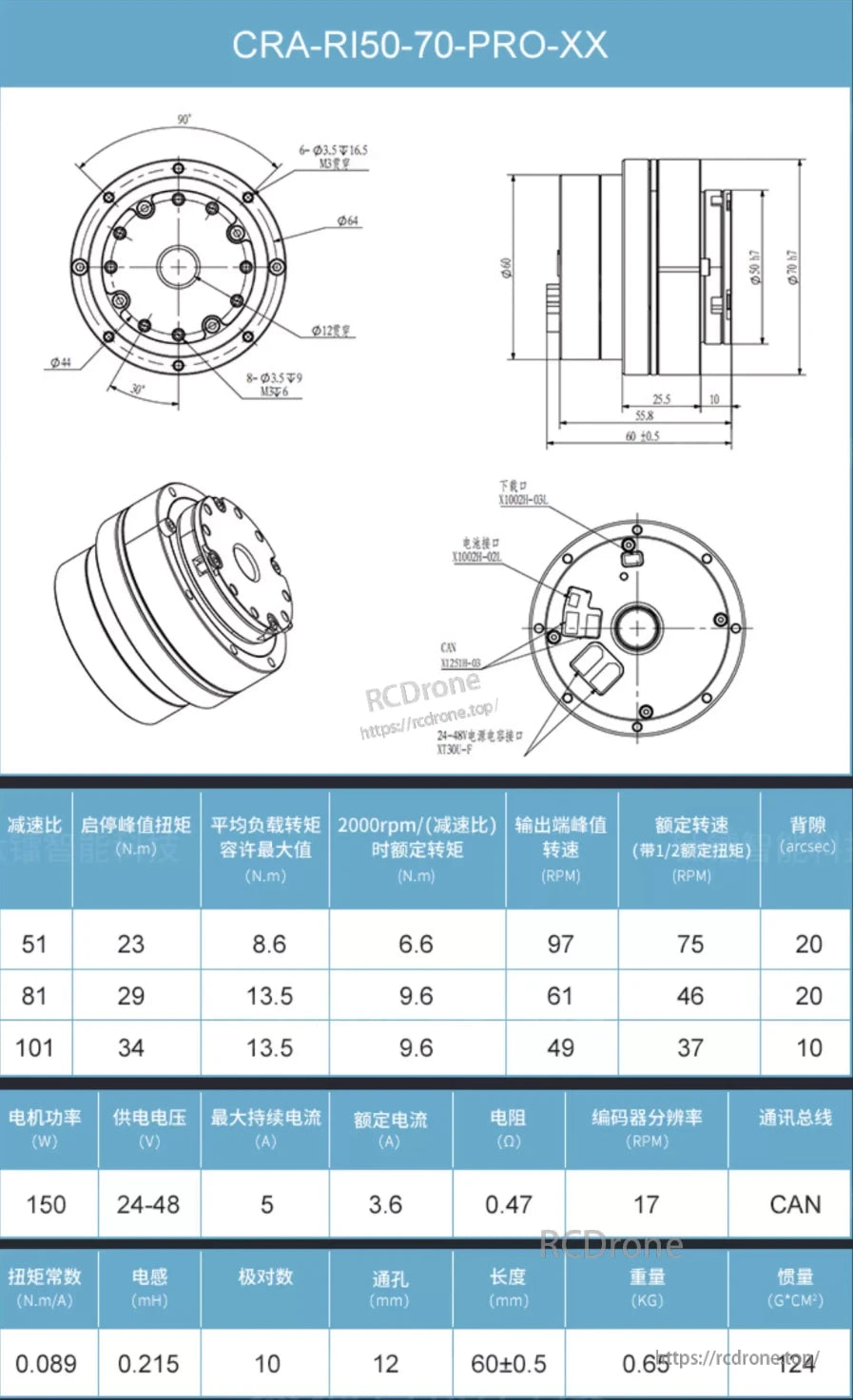
CRA-RI50-70-PRO-XX — Standard, keine Bremse (≈ 60 ± 0,5 mm Länge, ≈0,65 kg, Trägheit ≈ 124 g·cm²)
-
CRA-RI50-70-PRO-XX-B — mit Bremse (Länge ≈81,7 ± 0,5 mm)
-
Bus: DÜRFEN oder EtherCAT
-
Encoder: Einzel oder Dual Encoder
Nennleistung nach Übersetzungsverhältnis
| Übersetzungsverhältnis | Spitzendrehmoment beim Starten/Stoppen (N·m) | Max. durchschnittliches Lastdrehmoment (N·m) | Nenndrehmoment @ 2000 U/min/Verhältnis (N·m) | Spitzenausgangsdrehzahl (U/min) | Nenndrehzahl bei ½ Nenndrehzahl (U/min) | Spiel (Bogensekunden) |
|---|---|---|---|---|---|---|
| 51:1 | 23 | 8.6 | 6.6 | 97 | 75 | 20 |
| 81:1 | 29 | 13.5 | 9.6 | 61 | 46 | 20 |
| 101:1 | 34 | 13.5 | 9.6 | 49 | 37 | 10 |
Hinweise: Die Werte für Ausgangsdrehzahl und Drehmoment beziehen sich auf den Ausgang des Reduziergetriebes. Für die Variante 101:1 gilt ein geringeres Spiel.
Elektrisch &Amp; Motordaten
-
Leistung: 150 W
-
Versorgungsspannung: 24–48 VDC
-
Max. Dauerstrom: 5 A | Nennstrom: 3,6 A | Phasenwiderstand: 0.47 Ω
-
Drehmomentkonstante: 0,089 N·m/A | Induktivität: 0,215 mH | Polpaare: 10
-
Encoder-Auflösung: 17-Bit absolut (Power-Off-Speicher)
-
Feldorientierte Regelung (FOC) integriert
Mechanische Schnittstelle
-
Außendurchmesser: Ø80 mm
-
Lochkreis: Ø64 mm (vorderer Flansch)
-
Durchgangsloch: Ø10 mm
-
Gesamtlänge: 60 ± 0,5 mm (Standard) / 81,7 ± 0,5 mm (-B mit Bremse)
-
Masse: ~0,65 kg (Standard)
-
Trägheit (Rotor): ~124 g·cm² (Standard)
-
Die Vorderseite verfügt über mehrere M3-Befestigungselemente; detailliertes Lochmuster gemäß technischer Zeichnung.
Konnektivität
-
Bus: DÜRFEN oder EtherCAT
-
Varianten: Einzel-Encoder / Doppel-Encoder
-
Bremsoption: -B Modelle verfügen über eine integrierte Haltebremse.
Typische Anwendungen
-
Kollaborative und Desktop-Roboterarme, Serviceroboter
-
Schwenk-Neige-Kardanringe und Kamerasysteme
-
Mobile Manipulations- und Leistungsinspektions-UGVs
-
Industrielle Automatisierungsmodule und Schiffsausrüstung
Im Leistungsumfang enthalten
-
CRA-RI50-70-PRO-XX integriertes Gelenk (ausgewähltes Verhältnis & Optionen)
-
Gegenstecker &Amp; Basisschrauben (pro Kit)
-
Technische Zeichnung &Verstärker; Pinbelegung (digital)
Bestellcode (Beispiel)
CRA-RI50-70-PRO-XX-(B, T, 2E, IPXX)
-
XX: Übersetzungsverhältnis (51/81/101)
-
B: mit Bremse (leer = keine Bremse)
-
T/2E: Einzel-/Doppel-Encoder-Optionen
-
IPXX: optionale Wasserdichtigkeit (auf Anfrage)
Details

Spezifikationen der Roboterverbindung CRA-RI50-70-PRO-XX: 150-W-Motor, 24–48 V, CAN-Bus, Übersetzungsverhältnisse 51–101, Spitzendrehmoment bis zu 34 Nm, Länge 60 ± 0,5 mm, Gewicht 0,65 kg, Trägheit 124 g·cm².
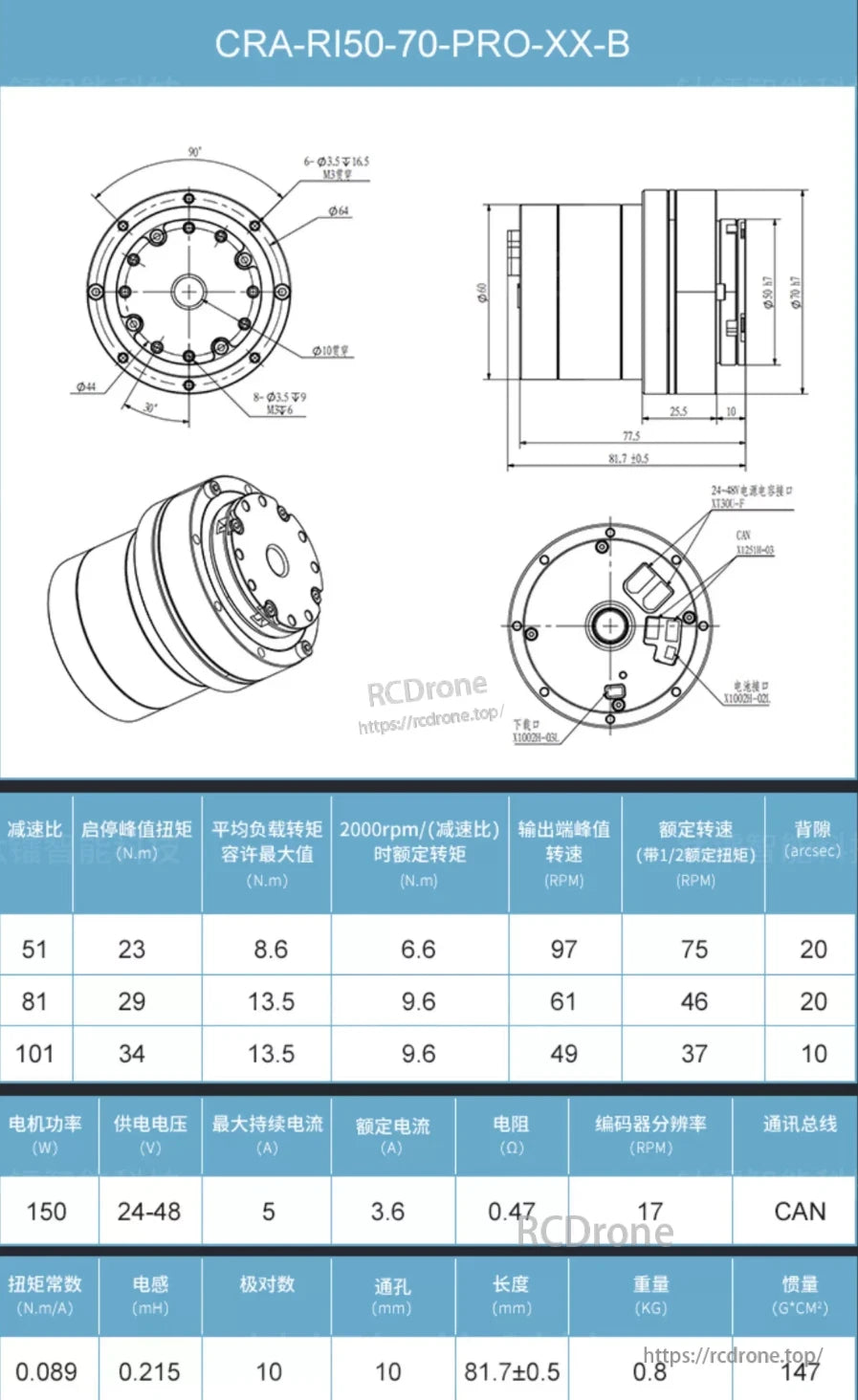
Robotergelenk mit 51, 81 oder 101 Übersetzungsverhältnissen, 150 W Leistung, 24–48 V Versorgung, CAN-Kommunikation, 17 U/min Encoderauflösung, 81,7 ± 0,5 mm Länge und 0,8 kg Gewicht.
Related Collections