






Ti5 Robot CRA-RI100-142-PRO-XX Integrierter Gelenkaktuator, 1 kW, 24–48 V, bis zu 169 N·m, IP65, CAN/EtherCAT, 51–161:1, optionale Bremse
Ti5 Robot CRA-RI100-142-PRO-XX Integrierter Gelenkaktuator, 1 kW, 24–48 V, bis zu 169 N·m, IP65, CAN/EtherCAT, 51–161:1, optionale Bremse
Ti5 Robot
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Der Ti5 Roboter CRA-RI100-142-PRO-XX ist ein kompakter integrierter Gelenkaktuator, der einen Permanentmagnet-Servomotor, ein Präzisionsgetriebe, einen Encoder und ein abgedichtetes Gehäuse kombiniert. Er ist Teil der PRO-Serie für Humanoide, Exoskelette, Cobots, AGVs und industrielle Mechanismen, mit hohe Drehmomentdichte, geringe Geräuschentwicklung und IP65-Schutz. Die Controller-Schnittstelle ist wählbar (CAN oder EtherCAT), kann Feedback Einzel- oder Doppelencoderund ein Haltebremse ist optional erhältlich. Ein 32 mm Hohlwelle vereinfacht die Kabel- oder Pneumatikführung durch die Verbindung.
Hauptmerkmale
-
Bis zu 169 N·m Nenndrehmoment (übersetzungsabhängig) mit gleichmäßigem, rastmomentarmen Ausgang
-
Versiegelt IP65 Gehäuse für staub- und wasserdichten Betrieb
-
24–48 V DC, 1 kW Klasse PMSM mit hoher Effizienz
-
CAN oder EtherCAT Feldbus; Einzel-/Doppel-Inkrementalgeber (17 Bit)
-
Optionale Haltebremse (-B) für sichere Positionierung und Halten im ausgeschalteten Zustand
-
Hohlwellenausgang (Ø32 mm); Durchgangsverkabelung möglich
-
Lange Lebensdauer &Amp; hohe Zuverlässigkeit; geringes Rauschen, hohe Präzision
-
Vorverdrahteter Kabelbaum (5 m) für eine schnelle Integration
Technische Daten
Elektrisch & Allgemein
-
Modell: CRA-RI100-142-PRO-XX (-B = mit Bremse)
-
Motortyp: Permanentmagnet-Synchron
-
Nennleistung: 1000 W
-
Versorgungsspannung: 24–48 V DC
-
Nennstrom: 15,8 A | Max. Dauerstrom: 16,9 A
-
Phasenwiderstand: 0,12 Ω | Induktivität: 0,3 mH
-
Polpaare: 8 | Drehmomentkonstante: 0,175 N·m/A
-
Encoder: Inkrementell, 17-Bit, Einzel- oder Doppel
-
Bus: DÜRFEN (EtherCAT wählbar)
-
Schutz: IP65
-
Drehbereich: 60°
-
Durchgangsloch: Ø32 mm
-
Betriebsumgebung: bis zu 60 °C
-
Kabellänge: 5 m
Mechanische Hülle
-
Ohne Bremse: Länge 95,7 ± 0,5 mm, Masse 3,8 kg, Rotorträgheitsmoment 3601 g·cm²
-
Mit Bremse (-B): Länge 115,7 ± 0,5 mm, Masse 4,5 kg, Rotorträgheitsmoment 4237 g·cm²
Hinweis: „100-142“ im Modellnamen bezeichnet die nominale Außendurchmesserklasse und die axiale Längenreihe.
Leistung nach Untersetzungsverhältnis — Ohne Bremse
| Verhältnis | Spitzendrehmoment beim Starten/Stoppen (N·m) | Max. zulässiges durchschnittliches Lastdrehmoment (N·m) | Nenndrehmoment bei 2000 U/min/Verhältnis (N·m) | Spitzenausgangsdrehzahl (U/min) | Nenndrehzahl bei ½ Nenndrehmoment (U/min) | Spiel (Bogensekunden) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Leistung nach Untersetzungsverhältnis — Mit Bremse (-B)
Drehmoment- und Drehzahlangaben sind identisch mit der Version ohne Bremse; Abmessungen/Gewicht/Trägheit unterscheiden sich (siehe oben).
| Verhältnis | Spitzendrehmoment beim Starten/Stoppen (N·m) | Max. zulässiges durchschnittliches Lastdrehmoment (N·m) | Nenndrehmoment bei 2000 U/min/Verhältnis (N·m) | Spitzenausgangsdrehzahl (U/min) | Nenndrehzahl bei ½ Nenndrehmoment (U/min) | Spiel (Bogensekunden) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Anwendungen
-
Humanoide Roboter: Schulter-/Hüft-/Knie-/Sprunggelenke, die eine abgedichtete Betätigung mit hohem Drehmoment erfordern
-
Kollaborative Roboter (Cobots): gleichmäßige, geräuscharme Bewegung mit Encoder-Redundanz
-
Exoskelette & Reha-Geräte: kompakte, drehmomentstarke Gelenke mit Ausschalten Halten (-B)
-
Kardanringe &Amp; Schwenk-Neige-Einheiten: präzise Positionierung mit geringem Spiel
-
FTF &und Spezialmaschinen: robust IP65 Fugen für staubige oder feuchte Standorte
-
Automobilindustrie &Amp; Meeresmechanismen: abgedichtete Betätigung für Hilfsbewegungssysteme
Details

CRA-RI100-142-PRO-XX Aktuatorspezifikationen: 51-161 Übersetzungsverhältnisse, 267-459 N.m Spitzendrehmoment, 1000-W-Motor, 24–48-V-Versorgung, CAN-Bus, 3,8 kg Gewicht, 3601 g·cm² Trägheit, 17 U/min Encoderauflösung.
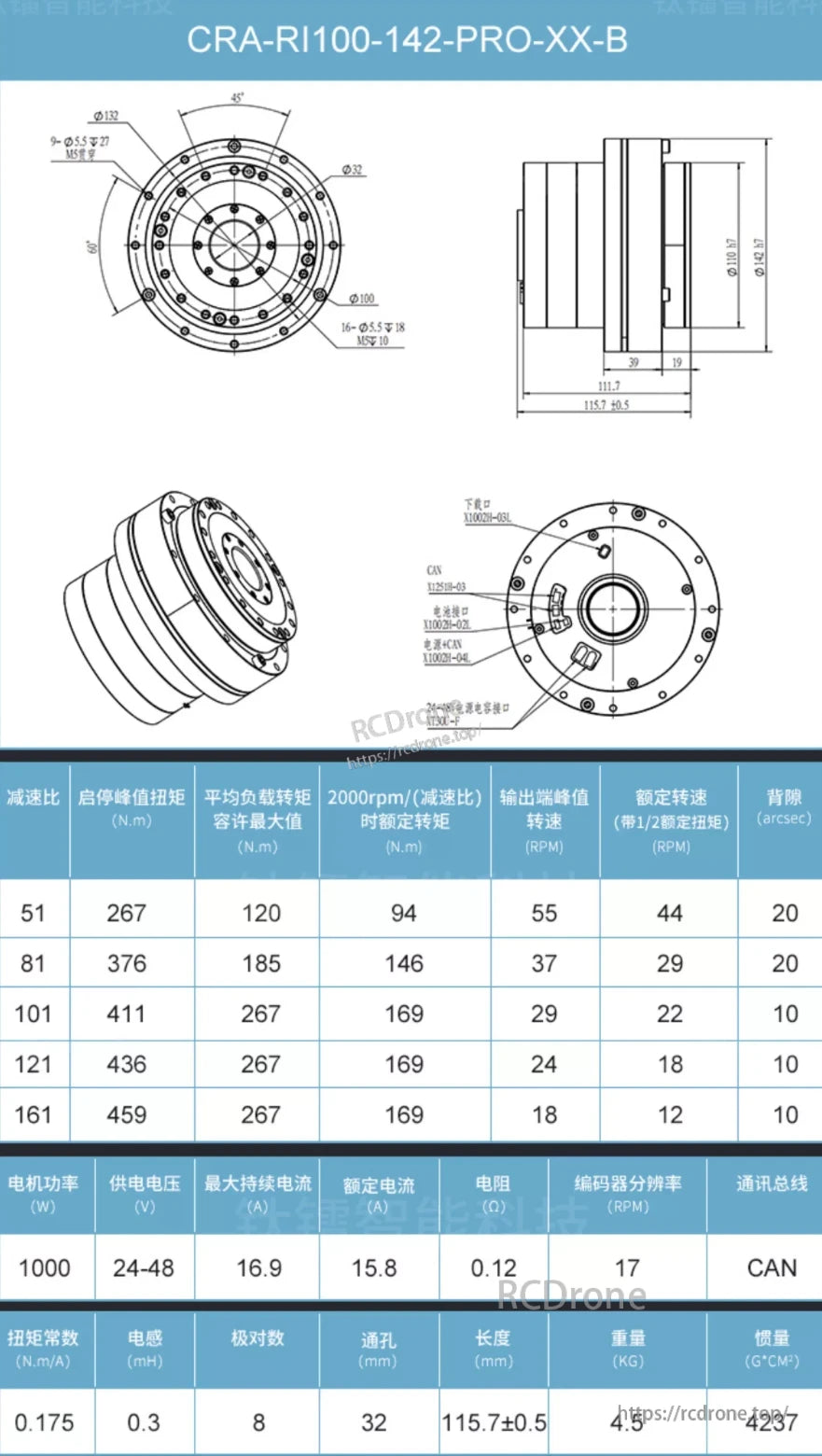
Spezifikationen des Antriebs CRA-RI100-142-PRO-XX-B: 1000-W-Motor, 24–48 V, 15,8 A Nennstrom, 17 U/min Encoder-Auflösung, CAN-Bus, 4,5 kg Gewicht, 115,7 mm Länge, mehrere Übersetzungsverhältnisse mit Drehmoment- und Geschwindigkeitsdaten.
Related Collections






