








Ti5 ROBOT CRA-RI30-40-PRO Gelenkmodul Motor 36W 24-48V 16Bit Encoder 51/101 Übersetzung
Ti5 ROBOT CRA-RI30-40-PRO Gelenkmodul Motor 36W 24-48V 16Bit Encoder 51/101 Übersetzung
Ti5 ROBOT
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Ti5 ROBOT CRA-RI30-40-PRO ist ein leichtes Gelenkmodul-Motor, das für die Gelenkbetätigung in der Robotik entwickelt wurde. Sichtbare Produktmerkmale sind: „Leichtes Gelenkmodul“, „Durchbruch in der Kernhardware“, „Leicht: kleine Größe, leistungsstarke Leistung“ und „Hohe Drehmomentdichte (wichtige Leistungsindikatoren und leichte Merkmale)“.
Für Konfigurationsanleitungen und technischen Support kontaktieren Sie https://rcdrone.top/ oder senden Sie eine E-Mail an [email protected].
Hauptmerkmale
Leichtgewicht
- Ultraleicht mit stärkerer Benutzerfreundlichkeit.
- Gewicht um mehr als 1/3 reduzieren.
- Den Energieverbrauch während des Betriebs erheblich reduzieren.
Stärkere Leistung
- Industrielle Leistungsstandards.
- Drehmomentdichte ist doppelt so hoch wie bei ähnlichen Produkten.
- Automobilqualität, antistatisch, vibrationsbeständig.
Modularisierung
- Sechs Module sind organisch integriert.
- Drei Serien können umfassend auf Kunden in verschiedenen Szenarien angepasst werden.
- Produktionsschwierigkeiten erheblich reduzieren; Produktionseffizienz verbessern.
Zusammensetzung des internen Moduls (beschriftet)
- Motorrückdeckel
- Steuerplatine
- Encoder
- Statorgehäuse
- Motorrotor
- Motorstator
- Harmonische Reduzierer
- Flexspline-Abdeckung
Drehmomentdichtevergleich (Nm/kg)
„Vergleich der Drehmomentdichte von gängigen Gelenkprodukten (Nm/kg)“ angezeigte Werte:
- Ti5 Roboter nächste Generation: 250+
- Eine amerikanische Marke: 254
- Ti5 Roboter Serienmodell: 192
- Eine chinesische Marke: 80.4
- Eine kanadische Marke: 53.5
- Eine koreanische Marke: 33,8
Massproduktions- und Entwicklungsberichte (wie gezeigt)
- Branchenspezifischer Vorteil in der Massenproduktion.
- Alle zugrunde liegenden Hardware kann gesteuert werden, und die Lokalisierungsrate kann 100% erreichen.
- Besitzt eine vollständige Software-Toolchain für die Roboterentwicklung, die hilft, Forschung und Entwicklung zu beschleunigen.
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadrupedale Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Technische Daten
| Parameter | Wert |
|---|---|
| Motor Modell | CRA-RI30-40-PRO-XX / CRA-RI30-40-PRO-XX-B |
| Übersetzungsverhältnis | 51 / 101 |
| Start-Stopp-Spitzenmoment | 3.3 / 4.8 N.m |
| Maximal zulässiges durchschnittliches Lastmoment | 2.3 / 3.3 N.m |
| 2000 U/min/(Übersetzungsverhältnis) Nennmoment bei dieser Geschwindigkeit | 1.8 / 2.4 N·m |
| Ausgangsspitzen-Drehzahl | 118 / 59 U/min |
| Nenn-Drehzahl | 90 / 45 U/min |
| Motorleistung | 36 W |
| Versorgungsspannung | 24-48 V |
| Maximaler Dauerstrom | 2 A |
| Nennstrom | 1 A |
| Encoder-Auflösung | 16 Bit |
| Rückraum | 40 / 40 Bogensekunden |
| Drehmomentkonstante | 0.024 N·m/A |
| Bohrung | 6 mm |
| Länge: Ohne Bremse / Mit Bremse | 60±0.5 mm / 78.6±0.5 mm |
| Gewicht: Ohne Bremse / Mit Bremse | 0.19 kg / 0.27 kg |
| Trägheit: Ohne Bremse / Mit Bremse | 27.4 g·cm² / 45.1 g·cm² |
Handbücher
Details

Entwickelt für kompakte Robotergelenke, zielt die CRA-RI30-40-PRO-Serie auf hohe Leistung in einem leichten Formfaktor ab.

Eine integrierte modulare Architektur kombiniert mehrere funktionale Abschnitte in einem gelenkbereiten Modul, um den Aufbau zu vereinfachen.

Ein eng integriertes internes Layout unterstützt die produktionsbereite Bereitstellung und eine vollständige Roboter-Entwicklungstoolchain.

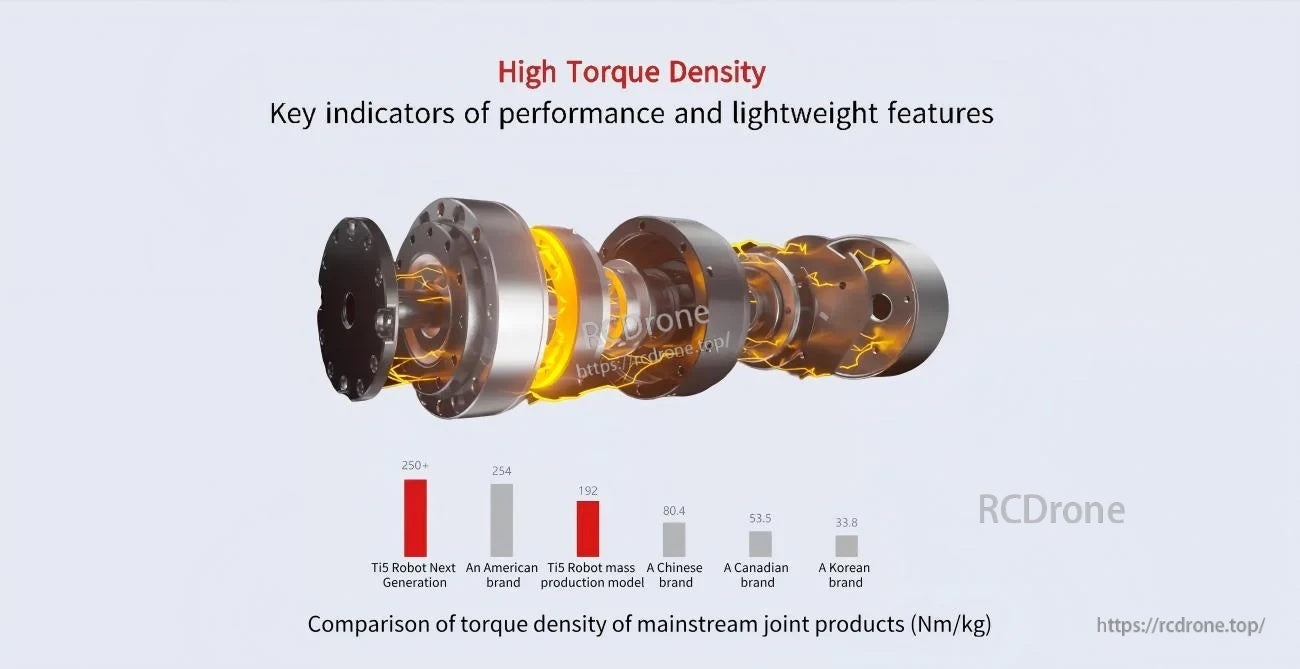
Drehmomentdichte wird als ein wichtiger Indikator für die leichte Leistung von Gelenkmodulen hervorgehoben.
Related Collections








