






Ti5 ROBOT CRA-RI40-52-PRO Motor-Gelenkmodul Motor 24-48V 90W 51/101 Übersetzung 16Bit Encoder
Ti5 ROBOT CRA-RI40-52-PRO Motor-Gelenkmodul Motor 24-48V 90W 51/101 Übersetzung 16Bit Encoder
Ti5 ROBOT
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Ti5 ROBOT CRA-RI40-52-PRO Motor ist ein leichtes Gelenkmodul für Robotikgelenke. Hervorgehobener Text umfasst: „LEICHTES GLEICHENMODUL“, „Durchbruch im Kernhardware-Bereich“, „Leichtgewichtig“ und „Kleine Größe, leistungsstarke Leistung“.
Hauptmerkmale
Leichtgewichtig / kleine Größe
- Ultraleichtes Design mit stärkerer Benutzerfreundlichkeit.
- Gewichtsreduktion um mehr als 1/3.
- Reduziert den Energieverbrauch erheblich.
Leistung
- Industrielle Leistungsstandards.
- Drehmomentdichte ist doppelt so hoch wie bei ähnlichen Produkten.
- Automobilqualität, antistatisch, vibrationsfest.
Modularisierung
- Sechs Module sind organisch integriert.
- Drei Serien passen sich umfassend an Kunden in verschiedenen Szenarien an.
- Verringert erheblich die Produktionsschwierigkeiten; verbessert die Produktionseffizienz.
Struktur (explodierte Ansicht Beschriftungen)
- Motorrückdeckel
- Steuerplatine
- Encoder
- Statorgehäuse
- Motorrotor
- Motorstator
- Harmonische Reduzierer
- Flexspline-Abdeckung
Massenproduktion / Plattformaussagen
- Branchenspezifischer Vorteil in der Massenproduktion.
- Alle zugrunde liegenden Hardware kann gesteuert werden, und die Lokalisierungsrate kann 100% erreichen.
- Vollständige Software-Toolchain für die Roboterentwicklung, die hilft, Forschung und Entwicklung zu beschleunigen.
- Die Ti5 Robot Rapid Development Platform kombiniert Hardware und Software, mit einem Open-Source-SDK, das für die zukünftige Verfügbarkeit erwähnt wird.
Drehmomentdichtevergleich (Nm/kg)
- 250+: Ti5 Robot Nächste Generation
- 254: Eine amerikanische Marke
- 192: Ti5 Robot Serienmodell
- 80.4: Eine chinesische Marke
- 53.5: Eine kanadische Marke
- 33.8: Eine koreanische Marke
Bildunterschrift: „Vergleich der Drehmomentdichte von gängigen Gelenkprodukten (Nm/kg)“.
Für Auswahlberatung, Dokumentationsfragen oder Integrationssupport kontaktieren Sie https://rcdrone.top/ oder senden Sie eine E-Mail an [email protected].
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadrupedale Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Spezifikationen
| Parameter | Wert |
|---|---|
| Motor Modell | CRA-RI40-52-PRO-XX / CRA-RI40-52-PRO-XX-B |
| Übersetzungsverhältnis | 51 / 101 |
| Start-Stopp-Spitzenmoment | 8.3 / 11 N.m |
| Maximal zulässiges durchschnittliches Lastmoment | 5.5 / 8.9 N.m |
| 2000 U/min/(Übersetzungsverhältnis) Nennmoment bei dieser Geschwindigkeit | 3.5 / 5 N·m |
| Ausgangs-End-Peak-Drehzahl | 118 / 59 U/min |
| Nenn-Drehzahl | 80 / 40 U/min |
| Motorleistung | 90 W |
| Versorgungsspannung | 24-48 V |
| Maximale Dauerstromstärke | 3 A |
| Nennstrom | 2 A |
| Encoder-Auflösung | 16 Bit |
| Rückraum | 40 / 30 Bogensekunden |
| Drehmomentkonstante | 0.05 N·m/A |
| Bohrung | 12 mm |
| Länge: Ohne Bremse / Mit Bremse | 62 ±0.5 mm / 82 ±0.5 mm |
| Gewicht: Ohne Bremse / Mit Bremse | 0.32 kg / 0.42 kg |
| Trägheit: Ohne Bremse / Mit Bremse | 73 g·cm² / 116.2 g·cm² |
Handbücher
Details

Entwickelt für kompakte Robotergelenke, bei denen geringes Gewicht und hohe Drehmomentdichte am wichtigsten sind.

Ein modulares internes Layout kombiniert Motor, Getriebe, Steuerplatine und Encoder in einem integrierten Gelenkmodul.

Basierend auf einer skalierbaren Produktionsplattform mit einer Entwicklungstoolchain, die darauf abzielt, die Robotintegration zu beschleunigen.

Die Aufschlüsselung auf Komponentenebene hilft zu bestätigen, was im Gelenkmodul für die Design- und Wartungsplanung enthalten ist.
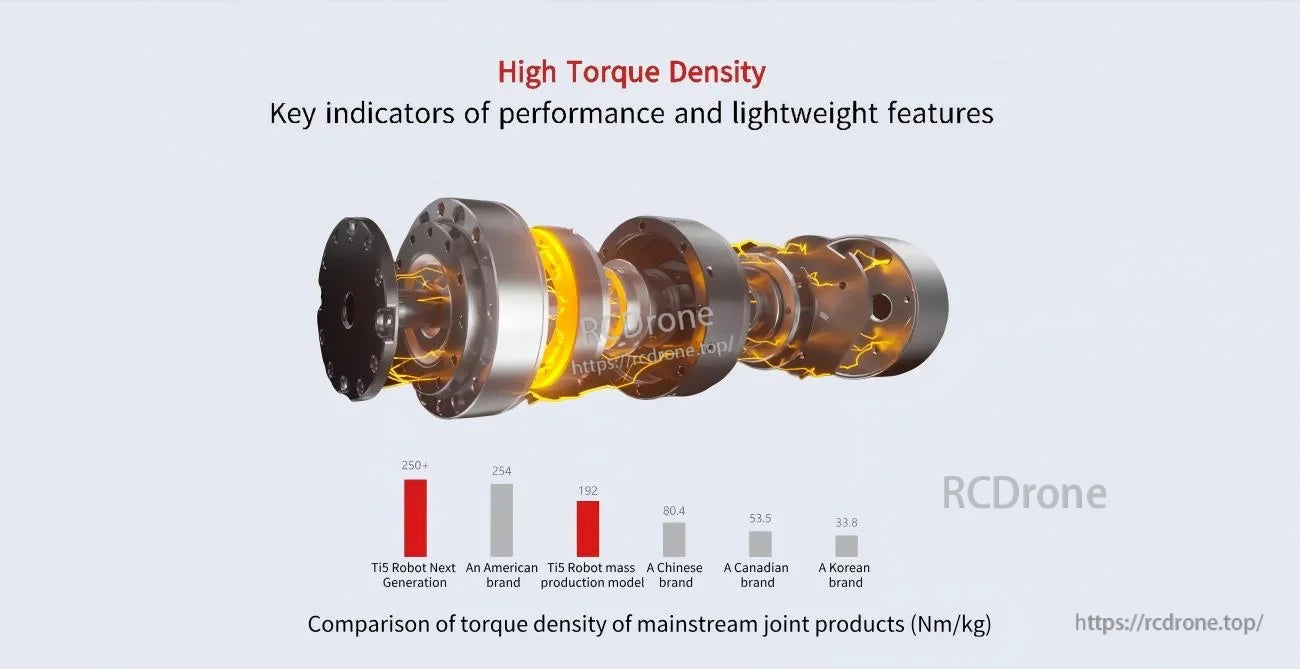
Der Vergleich der Drehmomentdichte (Nm/kg) bietet schnellen Kontext im Vergleich zu anderen gängigen Gelenkprodukten.
Related Collections






