



Ti5 Robot CRA-RI40-52-PRO-XX Integrierter Robotergelenkaktuator, harmonischer Antrieb, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, Hohlwelle, Einzel-/Doppel-Encoder (Bremsoption)
Ti5 Robot CRA-RI40-52-PRO-XX Integrierter Robotergelenkaktuator, harmonischer Antrieb, 7 N·m, 24–48 V, CAN/EtherCAT, IP65, Hohlwelle, Einzel-/Doppel-Encoder (Bremsoption)
Ti5 Robot
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Der Ti5 Robot CRA-RI40-52-PRO-XX ist ein kompaktes, integriertes Gelenkmodul, das einen rahmenlosen Torquemotor, einen Präzisions-Oberwellenreduzierer, einen Servotreiber und einen magnetischen Encoder in einer IP65-Einheit vereint. Mit 24–48 V DC-Versorgung und 90 W Nennleistung liefert er ein Nenndrehmoment von 7 Nm und eine Nennausgangsdrehzahl von 80 U/min für humanoide Roboter, Exoskelette, kollaborative Arme, Kardanringe, FTS und andere High-End-Anwendungen. Eine zentrale Durchgangsbohrung unterstützt die Kabelführung; Einzel- oder Doppelencoder-Konfigurationen sowie eine Haltebremsenoption sind verfügbar. Die Kommunikation erfolgt standardmäßig über CAN, EtherCAT ist optional.
Hauptmerkmale
-
Integrierter Motor + Antrieb + Oberschwingungsdämpfer + Encoder (magnetisch)
-
Nenndrehmoment 7 N·m; Nennausgangsdrehzahl 80 U/min; 90 W Leistung
-
Zwei Untersetzungsverhältnisse: 51:1 oder 101:1
-
Hohe Präzision: 17-Bit-Encoder, typisches Spiel 40 Bogensekunden (51)/30 Bogensekunden (101)
-
Geräuscharm, geringes Rastmoment, Design mit hoher Drehmomentdichte
-
Schutzart IP65; optional Niedertemperatur & wasserdichte Anpassung
-
Kommunikationsbus: CAN (Standard) oder EtherCAT (optional)
-
Einzel-/Doppel-Encoder-Optionen; Versionen mit oder ohne Bremse
-
Durchgangsloch für Verdrahtung: 12 mm (Standard)/11 mm (Bremse)
-
Typische Anwendungen: Humanoide, Cobot-Gelenke, Exoskelette, Schwenk-Neige-Systeme, Industrieanlagen, Leistungsinspektionsroboter, Schiffs-/Fahrzeugsysteme
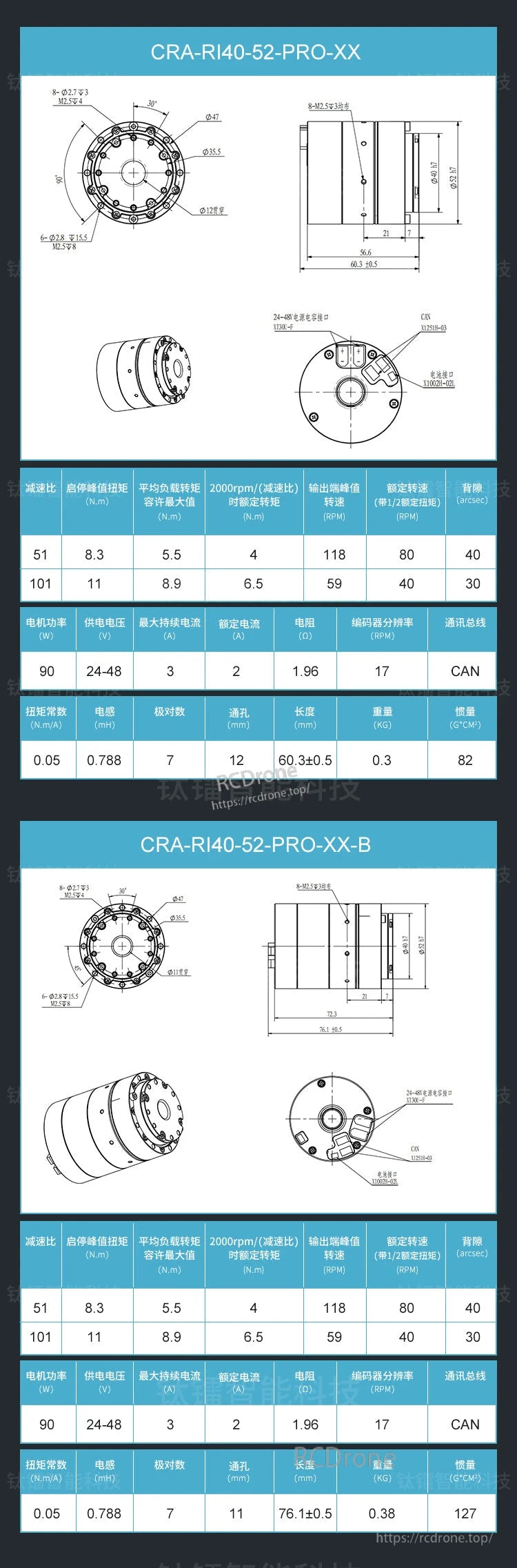
Leistung nach Übersetzungsverhältnis
| Artikel | 51:1 | 101:1 |
|---|---|---|
| Spitzendrehmoment beim Starten/Stoppen (N·m) | 8.3 | 11 |
| Max. zulässiges durchschnittliches Lastdrehmoment (N·m) | 5.5 | 8.9 |
| Nenndrehmoment bei 2000 U/min/(Verhältnis) (N·m) | 4 | 6.5 |
| Spitzenausgangsdrehzahl (U/min) | 118 | 59 |
| Nenndrehzahl bei ½ Nenndrehmoment (U/min) | 80 | 80 |
| Spiel (Bogensekunden) | 40 | 30 |
Elektrische Spezifikationen
-
Versorgungsspannung: 24–48 V DC
-
Nenn-/Dauerstrom: 2 A (max. kontinuierlich 3 A)
-
Phasenwiderstand: 1,96 Ω
-
Induktivität: 0,788 mH
-
Drehmomentkonstante: 0,05 N·m/A
-
Polpaare: 7
-
Encoderauflösung: 17-Bit (magnetisch)
Mechanisch & Schnittstelle
-
Schutzgrad: IP65
-
Nennausgangsdrehzahl: 80 U/min
-
Kommunikation: DÜRFEN (Standard)/EtherCAT (Option)
-
Durchgangsloch (für die Verkabelung): Ø12 mm (Standard)/Ø11 mm (mit Bremse)
-
Länge &Amp; Trägheit (ohne Bremse): 60,3 ± 0,5 mm, 82 g·cm²
-
Länge &Amp; Trägheit (-B Bremsversion): 76,1 ± 0,5 mm, 127 g·cm²
-
Masse: 0.3 kg
-
Kabellänge: 5 m
-
Betriebsumgebungstemperatur (typisch): bis zu 60 °C
-
Materialien: Aluminiumkomponenten mit Präzisions-Oberschwingungsdämpfer
Varianten & Optionen
-
Kommunikation: CAN oder EtherCAT
-
Encoder: einzelner oder doppelter magnetischer Encoder
-
Bremse: ohne Bremse (Standard) oder -B Haltebremsenversion
-
Umfeld: anpassbares Wasserdichtigkeits- und Tieftemperaturpaket
-
Reihenbezeichnung: CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) (zeigt Untersetzungsgetriebe, Anzahl der Drehmomentsensoren/Encoder, Verhältnis, Schutz usw. an)
Typische Anwendungen
Humanoide Gelenke (Schulter/Ellenbogen/Hüfte/Knie), kollaborative Roboterarme, Exoskelett-Aktuatoren, Schwenk-Neige-/Sicht-Kardanringe, Achsen für die industrielle Automatisierung, UGVs/AGVs zur Leistungsinspektion und Hilfsmechanismen für Schifffahrt/Fahrzeuge.
Hinweise
-
Bei der Installation verwenden Sie die in den Zeichnungen angegebenen Schraubenmuster und Toleranzen.
-
Bestätigen Sie vor der Bestellung das Verhältnis, die Encoderkonfiguration, den Kommunikationsbus und die Bremsanforderungen.
-
Aufgrund der industriellen Natur dieses Produkts sind installierte/benutzte Einheiten in der Regel vom Umtausch ausgeschlossen. Konsultieren Sie vor dem Kauf die Größendokumente mit dem technischen Personal.
Details
Ti5 Robot Joint Actuator CRA-R140-52-PRO-XX und -B bieten 90 W Leistung, 24–48 V Versorgung, 3 A maximalen Strom, 17 U/min Encoderauflösung, Drehmoment, Geschwindigkeit und CAN-Kommunikation.

Ti5-Robotergelenkaktuator Modell CRA-PIXX-XX-(PRO)-XX-(B, T, 2E, IPXX) umfasst Bremse, Drehmomentsensor, Doppelencoder, Wasserdichtigkeit, Untersetzungsverhältnis, Außendurchmesser und Motortyp.

Gelenkaktuatoren der PRO-Serie für humanoide Roboter, Exoskelette, kollaborative Roboter, Automobile, AGVs. Eigenschaften: hohe Robustheit, lange Lebensdauer, hohe Drehmomentdichte, geringes Rastmoment, wasserdicht, staubdicht, explosionsgeschützt, geräuscharm, hohe Präzision, Hohlwellendesign.
Related Collections



