










Ti5 ROBOT CRA-RI60-70-PRO Motor 300W 24-48V Gelenkmodul (51/81/101/121) 16Bit Encoder
Ti5 ROBOT CRA-RI60-70-PRO Motor 300W 24-48V Gelenkmodul (51/81/101/121) 16Bit Encoder
Ti5 ROBOT
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der Ti5 ROBOT CRA-RI60-70-PRO Motor ist ein leichtes Gelenkmodul, das für kompakte Robotergelenke entwickelt wurde, bei denen eine hohe Drehmomentdichte und präzises Feedback erforderlich sind. Es integriert wichtige Gelenkkomponenten wie den Encoder, die Steuerplatine, den Motorstator/-rotor und harmonische Reduzierer in eine modulare Struktur.
Hauptmerkmale
- Leichtes, kompaktes Gelenkmodul: Kleines Design für platzbeschränkte Robotergelenke.
- Ultraleichtes Konzept: Angegebene Gewichtsreduktion um mehr als 1/3, was hilft, den Energieverbrauch zu senken.
- Stärkere Leistung (angegeben): Industrielle Leistungsstandards; die angegebene Drehmomentdichte ist doppelt so hoch wie die ähnlicher Produkte.
- Modularisierung: Sechs Module werden als interoperabel beschrieben; drei Serien werden als anpassbar für verschiedene Szenarien beschrieben, die eine verbesserte Produktionseffizienz unterstützen.
- Integrierte Gelenkstruktur: Motorrückdeckel, Steuerplatine, Encoder, Statorgehäuse, Motorrotor, Motorstator, harmonische Reduzierer und Flexspline-Abdeckung.
- Vorteil der Massenproduktion (angegeben): Die zugrunde liegende Hardware wird als steuerbar beschrieben; eine vollständige Software-Toolchain wird für die Roboterentwicklung und R &D-Beschleunigung beschrieben.
- Drehmomentdichte-Vergleichsgrafik: Diagrammtitel wird als „Vergleich der Drehmomentdichte von gängigen Gelenkprodukten (Nm/kg)“ angezeigt mit Werten: 250+ (Ti5 Robot Next Generation), 254 (Eine amerikanische Marke), 192 (Ti5 Robot Massenproduktionsmodell), 80.4 (Eine chinesische Marke), 53.5 (Eine kanadische Marke), 33.8 (Eine koreanische Marke).
Für Auswahlunterstützung und Integrationsfragen kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/ .
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Technische Daten
| Parameter | Wert |
|---|---|
| Motor Modell | CRA-RI60-70-PRO-XX / CRA-RI60-70-PRO-XX-B |
| Übersetzungsverhältnis | 51 / 81 / 101 / 121 |
| Start-Stopp-Spitzenmoment | 42 / 53 / 66 / 66 N.m |
| Maximal zulässiges durchschnittliches Lastmoment | 32 / 33 / 49 / 49 N.m |
| 2000 U/min/(Übersetzungsverhältnis) Nennmoment bei dieser Geschwindigkeit | 19.8 / 27.5 / 30 / 30 N.m |
| Ausgangs-Enddrehzahl | 82 / 51 / 41 / 32 U/min |
| Nenn-Drehzahl | 68 / 43 / 34 / 24 U/min |
| Motorleistung | 300 W |
| Versorgungsspannung | 24-48 V |
| Maximaler Dauerstrom | 6.7 A |
| Nennstrom | 5 A |
| Encoder-Auflösung | 16Bit |
| Rückraum | 20 / 20 / 10 / 10 Bogensekunden |
| Drehmomentkonstante | 0.096 N.m/A |
| Bohrung | 18 mm |
| Länge: Ohne Bremse / Mit Bremse | 72.5±0.5 mm / 93±0.5 mm |
| Gewicht: Ohne Bremse / Mit Bremse | 0.73 kg / 0.88 kg |
| Trägheit: Ohne Bremse / Mit Bremse | 394,8 g·cm² / 492 g·cm² |
Handbücher
Details

Eine kompakte, leichte Gelenkmodulplattform für raumbegrenzte Robotergelenke, die dennoch eine hohe Drehmomentdichte und präzises Feedback benötigen.

Integriertes Gelenkdesign kombiniert Motor, Encoder und Antriebselektronik in einer modularen Struktur, um die Gelenkintegration zu vereinfachen.


Kernkomponenten des Gelenks—Steuerplatine, Encoder, Motorrotor/Stator und harmonischer Reduzierer—sind in einer gelenkbereiten Baugruppe integriert.
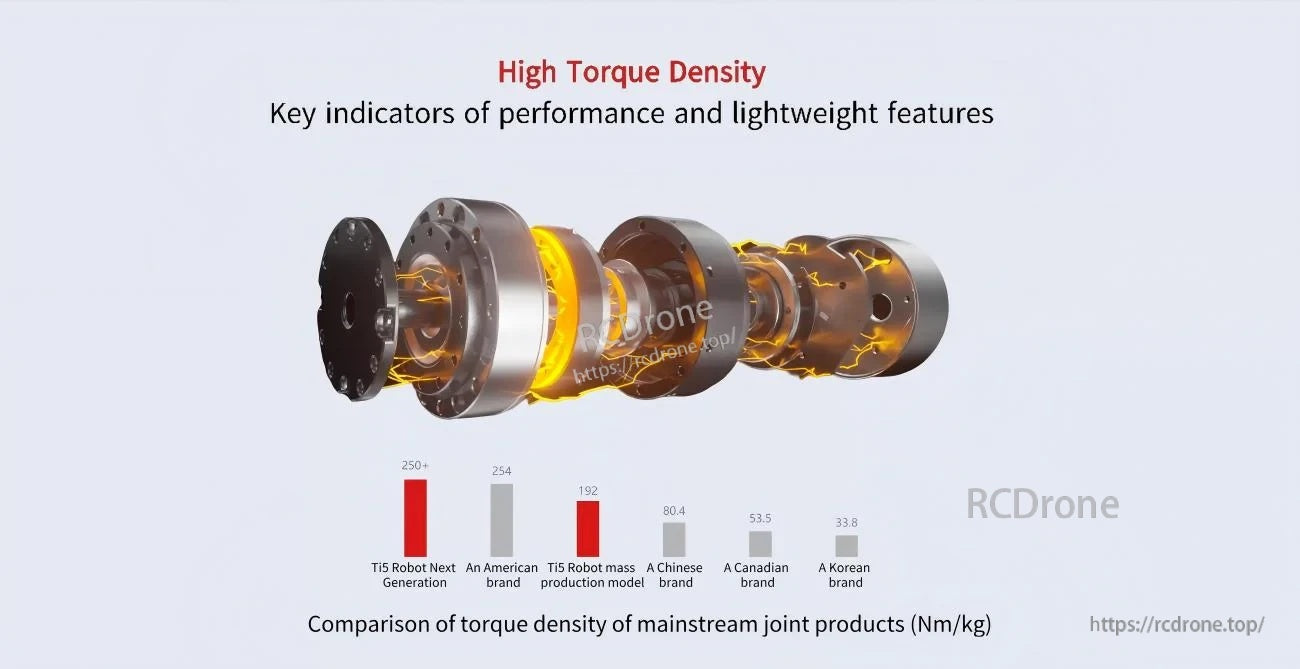
Drehmomentdichtevergleich (Nm/kg) hilft, die Leistung von Gelenkmodulen über Ti5-Roboter-Modelle und andere gängige Produkte zu benchmarken.
Related Collections










