


Ti5 Robot CRA-RI60-70-PRO-S-XX Hohlwellen-Gelenkaktuator, 24–48 V CAN/EtherCAT, IP65, 51–102:1, bis zu 66 N·m Spitze, -B-Bremsoption
Ti5 Robot CRA-RI60-70-PRO-S-XX Hohlwellen-Gelenkaktuator, 24–48 V CAN/EtherCAT, IP65, 51–102:1, bis zu 66 N·m Spitze, -B-Bremsoption
Ti5 Robot
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Der Ti5 Roboter CRA-RI60-70-PRO-S-XX ist ein kompaktes, integriertes Robotergelenk mit Hohlwelle für Arme, Humanoide, Exoskelette, UAV-Mechanismen und mobile Plattformen. Es vereint einen rahmenlosen BLDC-Torquemotor, ein Präzisionsgetriebe, einen magnetischen Absolutwertgeber (einfach oder doppelt) und eine Antriebsschnittstelle in einem IP65-Modul. Die PRO-S-Architektur legt Wert auf Miniaturisierung und schnelle Dynamik bei gleichzeitig hohem Last-Gewichts-Verhältnis. Die Kommunikation erfolgt standardmäßig über CAN, EtherCAT ist optional verfügbar. Die werkseitige Bremsenversion „-B“ verfügt über eine Haltebremse für die Sicherheit bei Abschaltung. (Alle unten aufgeführten Werte stammen aus den bereitgestellten Datenblättern und Produkt-Screenshots.)
Hauptmerkmale
-
Hohlwellen-Kompaktgelenkmodul (Ø60/Ø70-Serie) für einfache Kabel- und Pneumatikführung
-
Übersetzungsverhältnisse 51, 81, 101, 102 mit geringem Spiel (bis zu 10 Bogensekunden, je nach Übersetzungsverhältnis)
-
Spitzendrehmoment bis zu 66 Nm; Nenndrehmoment bis zu 30 Nm (2000 U/min/Verhältnisbedingung)
-
Schnelle Reaktion; hohes Last-Gewichts-Verhältnis (≈0,69 kg Standard/≈0,84 kg mit Bremse)
-
IP65 staub-/wasserdichtes Gehäuse, Aluminiumstruktur
-
Magnetischer Absolutwertgeber, 17 Bit; Einzel- oder Doppelgeberoptionen
-
24–48 V DC-Versorgung, CAN-Bus (EtherCAT optional); Durchgangswelle Ø18 mm
-
Variante „-B“ mit zusätzlicher Bremse bei ausgeschaltetem Motor; längerer Körper und höhere Trägheit zum Halten
Technische Daten
Gemeinsame elektrische &Amp; mechanisch
-
Motorleistung: 300 W
-
Versorgungsspannung: 24–48 V DC
-
Max. Dauerstrom: 6,7 A; Nennstrom: 5 A; Phasenwiderstand: 0,33 Ω
-
Drehmomentkonstante: 0,096 N·m/A; Induktivität: 0,074 mH; Polpaare: 10
-
Encoder: magnetisch absolut, 17 Bit; Einzel-/Doppel-Encoder wählbar
-
Kommunikation: CAN (EtherCAT optional)
-
Durchgangsbohrung: 18 mm; Schutzart: IP65
Pro Übersetzungsverhältnis (CRA-RI60-70-PRO-S-XX)
| Verhältnis | Spitzendrehmoment beim Starten/Stoppen (N·m) | Max. Dauer-/Durchschnittsdrehmoment (N·m) | Nenndrehmoment bei 2000 U/min/Verhältnis (N·m) | Spitzenausgangsdrehzahl (U/min) | Nenndrehzahl bei ½ Nenndrehmoment (U/min) | Spiel (Bogensekunden) |
|---|---|---|---|---|---|---|
| 51 | 42 | 32 | 19,8 | 82 | 68 | 20 |
| 81 | 53 | 33 | 27,5 | 51 | 43 | 20 |
| 101 | 66 | 49 | 30 | 41 | 34 | 10 |
| 102 | 66 | 49 | 30 | 32 | 24 | 10 |
Formfaktor &Amp; Trägheit
-
Standard (-XX): Länge 70,7 ± 0,5 mm; Gewicht 0,69 kg; Rotorträgheit 382 g·cm²
-
Mit Bremse (-XX-B): Länge 89,7 ± 0,5 mm; Gewicht 0.84 kg; Rotorträgheit 538 g·cm²
Weitere Katalogdaten
-
Nenndrehmoment-Referenzwert: 30 N·m
-
Typische Nenndrehzahl: 30 U/min (verhältnisabhängig)
-
Betriebstemperatur: bis 60 °C
-
Montage: Schraubmontage; Passfederwellenschnittstelle
Hinweise: Einzel-/Doppelencoder, Bremsoption und Bustyp sind bei der Bestellung wählbar; EtherCAT wird in den Screenshots als „Ether-cat“ angezeigt. Alle oben genannten Abmessungen und Angaben stammen direkt aus den mitgelieferten Datenblättern für CRA-RI60-70-PRO-S-XX und CRA-RI60-70-PRO-S-XX-B.
Anwendungen
-
6-achsige kollaborative und industrielle Roboterarme
-
Humanoide Gelenke (Schulter, Ellbogen, Hüfte, Knie)
-
Exoskelette und Rehabilitationsgeräte
-
UAV-Kardanringe/-Mechanismen und Lichtmanipulatoren
-
AGV/AMR-Mechanismen, kleine Werkzeugmaschinen und Laborautomatisierung
Details
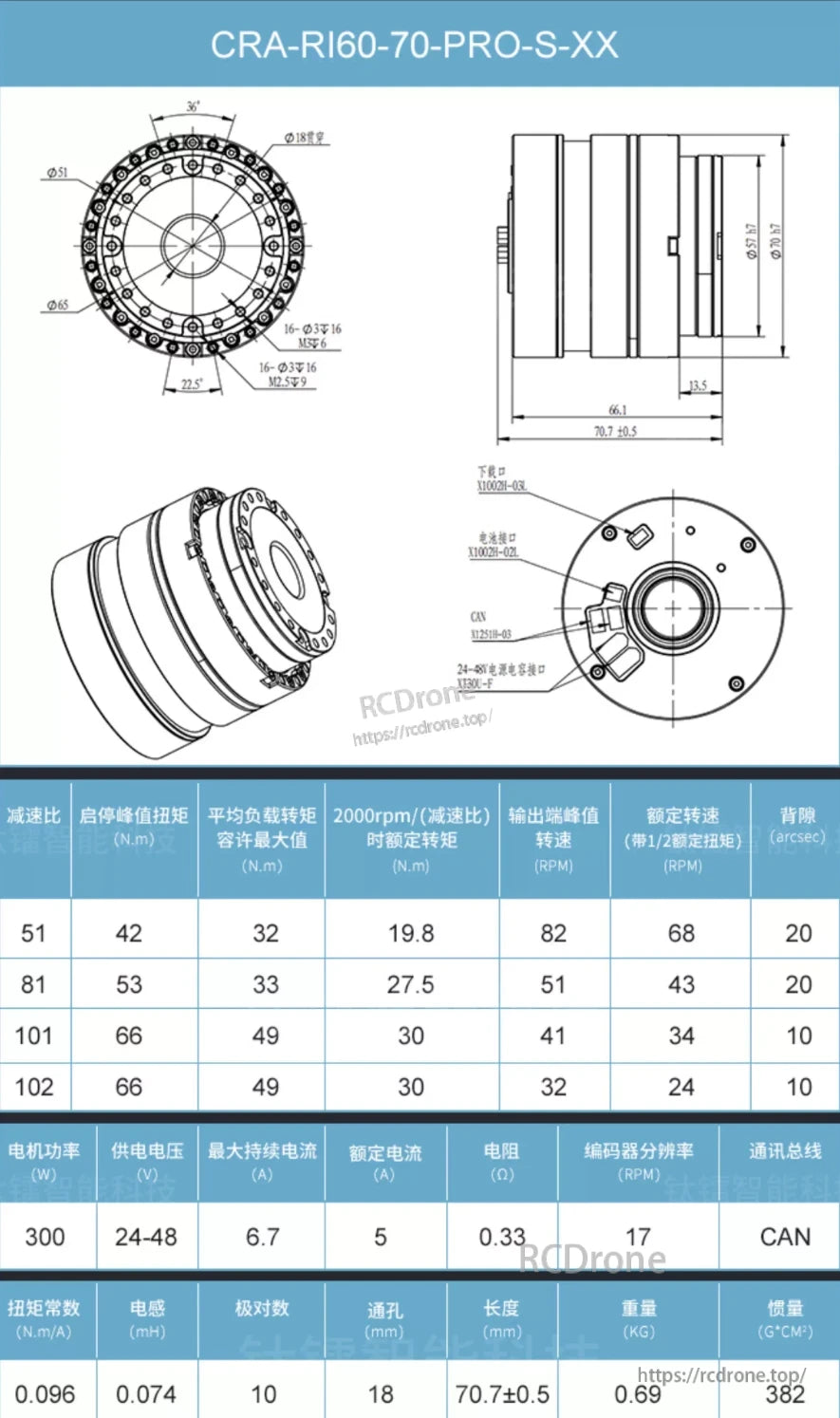
Spezifikationen des Antriebs CRA-RI60-70-PRO-S-XX: 300-W-Motor, 24–48 V, 5 A Nennstrom, Encoderauflösung 17 U/min, CAN-Kommunikation, 0,69 kg Gewicht, 382 G·CM² Trägheit, mehrere Übersetzungsverhältnisse mit Drehmoment- und Geschwindigkeitsdaten.

Spezifikationen des Antriebs CRA-RI60-70-PRO-S-XX-B: 300-W-Motor, 24–48 V, 5 A Nennstrom, 0,33 Ω Widerstand, 17 U/min Encoderauflösung, CAN-Bus, 0,84 kg Gewicht, 538 G·cm² Trägheit. Abmessungen: 89,7 ± 0,5 mm Länge, Ø 70,37 mm.
Related Collections


