Ti5 Robot CRA-RI60-80-PRO-XX Integriertes Robotergelenkmodul – Harmonic Drive, 24–48 V, CAN/EtherCAT, 17-Bit-Encoder
Ti5 Robot CRA-RI60-80-PRO-XX Integriertes Robotergelenkmodul – Harmonic Drive, 24–48 V, CAN/EtherCAT, 17-Bit-Encoder
Ti5 Robot
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Der Ti5-Roboter CRA-RI60-80-PRO-XX ist ein kompaktes, hohlwellenintegriertes Gelenk für Humanoide, Cobots und mobile Manipulatoren. Es kombiniert eine ultradünner Oberwellenreduzierer, rahmenloser Torquemotor, FOC-Servoantrieb, Und absoluter magnetischer Encoder in einem Modul und bietet nahezu spielfreier Ausgang, geringe Geräuschentwicklung und hohe Drehmomentdichte. Das Gelenk unterstützt DÜRFEN oder EtherCAT, Einzel- oder Doppelencoderund ein optionale Haltebremse. Es sind zwei Längen erhältlich: die Standard-PRO-XX und die erweiterte PRO-XX-B (längerer Körper, höhere Rotorträgheit, größere Durchgangsbohrung).
Hauptmerkmale
-
All-in-One-Verbindung: Oberschwingungsdämpfer + Drehmomentmotor + FOC-Treiber + Absolutwertgeber.
-
Nahezu spielfrei am Ausgang; sanfte Steuerung bei niedriger Geschwindigkeit und geringe akustische Geräuschentwicklung.
-
Hohlwellenausführung für Kabel-/Luftkanaldurchführung; mehrere Untersetzungsverhältnisse.
-
Absolutwertgeber, 17 Bit, Stromausfall-Positionsspeicher; optional Doppel-Encoder Version.
-
Kommunikation: DÜRFEN oder EtherCAT wählbar.
-
Leistung: 24–48 V, integrierter Treiber, 300 W Motorleistungsklasse.
-
Optionale Haltebremse; IP/wasserdicht &Amp; Niedertemperatur Anpassung möglich.
-
Anwendungsbereit für Kardanringe, Humanoide, Cobots, Industrieausrüstung, Patrouillenroboter und Marinegeräte.
Technische Daten
Elektrisch &Amp; Steuerung (gemeinsam genutzt von PRO-XX/PRO-XX-B)
-
Motornennleistung: 300 W
-
Versorgungsspannung: 24–48 V DC
-
Max. Dauerstrom: 6,7 A; Nennstrom: 5 A
-
Phasenwiderstand: 0,33 Ω
-
Drehmomentkonstante: 0,096 N·m/A
-
Induktivität: 0,074 mH
-
Polpaare: 10
-
Encoder: 17-Bit absolut; Einzel-/Doppel-Encoder-Optionen
-
Bus: DÜRFEN (Standard) oder EtherCAT (Option)
Mechanisch (Hohlwelle)
-
Durchgangsloch (PRO-XX): Ø15 mm
-
Durchgangsloch (PRO-XX-B): Ø18 mm
-
Länge (PRO-XX): 70,4 ± 0,5 mm; Gewicht ≈1,01 kg; Rotorträgheit ≈441 g·cm²
-
Länge (PRO-XX-B): 92,9 ± 0,5 mm; Gewicht ≈1,17 kg; Rotorträgheit ≈595 g·cm²
-
Befestigung: stirnseitiger Lochkreis (Hohlabtrieb); Harmonic Reducer integriert
-
Optionen: Haltebremse; Einzel-/Doppelencoder; CAN/EtherCAT; Wasserdichtigkeit &Amp; Niedrigtemperaturpaket
Reduzieroptionen &Verstärkerleistung (Ausgangsseite)
Spiel: so gering wie 10–20 Bogensekunden abhängig vom Verhältnis.
| Untersetzungsverhältnis | Spitzendrehmoment beim Starten/Stoppen (N·m) | Max. durchschnittliches Lastdrehmoment (N·m) | Nenndrehmoment bei 2000 U/min/Übersetzung (N·m) | Spitzengeschwindigkeit (U/min) | Nenndrehzahl bei ½ Nenndrehmoment (U/min) | Spiel (Bogensekunden) |
|---|---|---|---|---|---|---|
| 51:1 | 42 | 32 | 19,8 | 82 | 68 | 20 |
| 81:1 | 53 | 33 | 27,5 | 51 | 43 | 20 |
| 101:1 | 66 | 49 | 30 | 41 | 34 | 10 |
| 121:1 | 66 | 49 | 30 | 32 | 24 | 10 |
Hinweise:
• Die oben genannten Daten stammen aus den Produktblättern für CRA-RI60-80-PRO-XX und PRO-XX-B.
• PRO-XX-B verfügt über dieselbe Drehmoment-/Drehzahltabelle; es bietet ein größeres Durchgangsloch und eine höhere Trägheit mit dem längeren Körper.
Anwendungen
-
Humanoid &und Serviceroboter: Schulter-, Ellenbogen-, Hüft-, Knie-, Sprunggelenke mit hoher Drehmomentdichte.
-
Kollaborative Roboterarme: präzise, spielarme Achsen für eine sanfte Kraftregelung.
-
Kardanringe &Amp; Schwenk-Neige-Einheiten: leises, stabiles Tracking bei niedriger Geschwindigkeit mit absolutem Positionsspeicher.
-
Industrielle Ausrüstung & AGV/AMR-Manipulatoren: kompakte integrierte Betätigung für beengte Platzverhältnisse.
-
Power-Patrouillen- und Inspektionsroboter; Marine-/Schiffsgeräte (mit wasserdichter Option).
Details
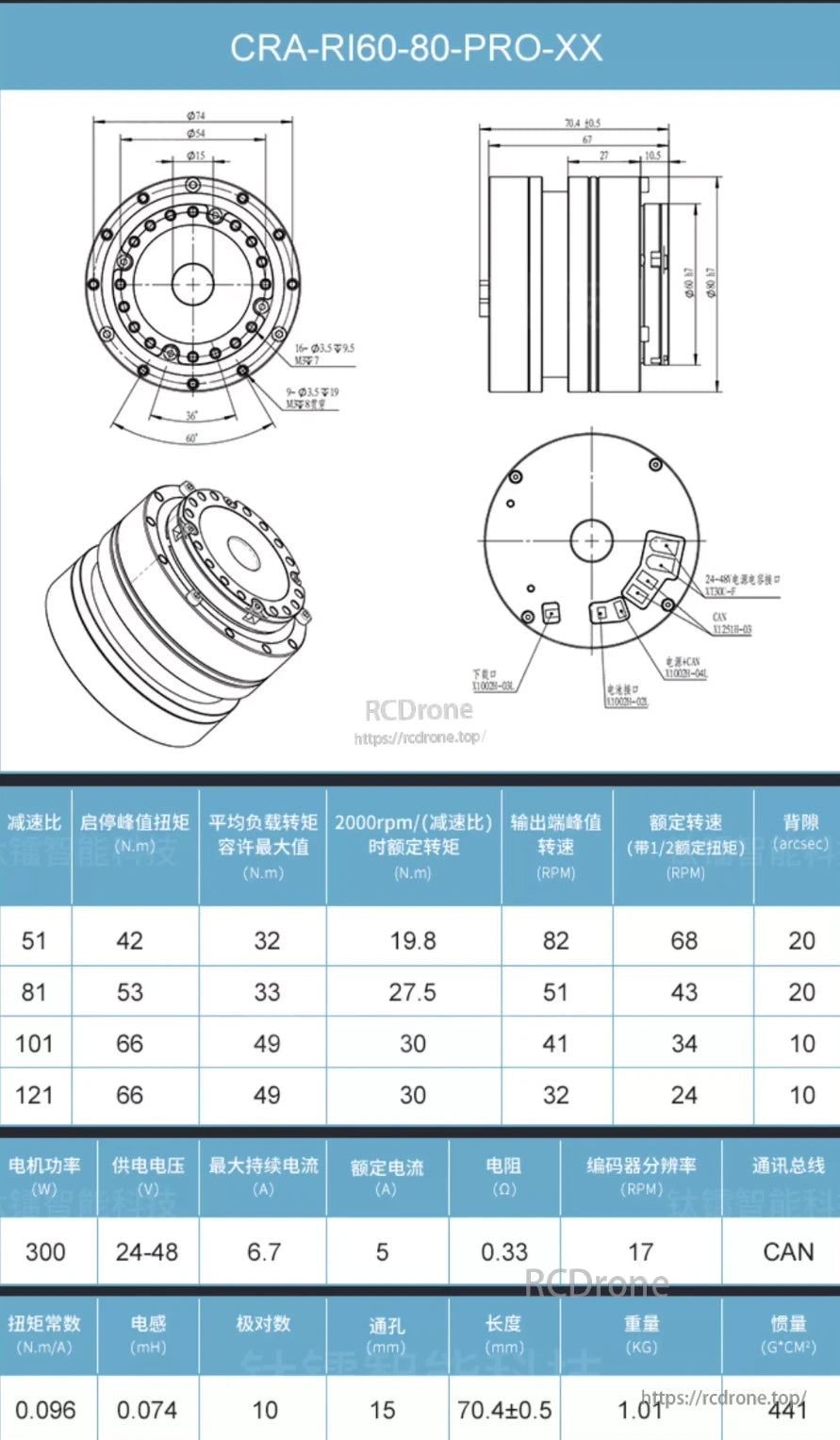
Spezifikationen des Robotergelenkmoduls CRA-RI60-80-PRO-XX: 300-W-Motor, 24–48-V-Eingang, CAN-Bus, 17 CPR-Encoder, 70,4 mm Länge, 1,01 kg Gewicht, mehrere Übersetzungsverhältnisse mit bereitgestellten Drehmoment- und Geschwindigkeitsdaten.
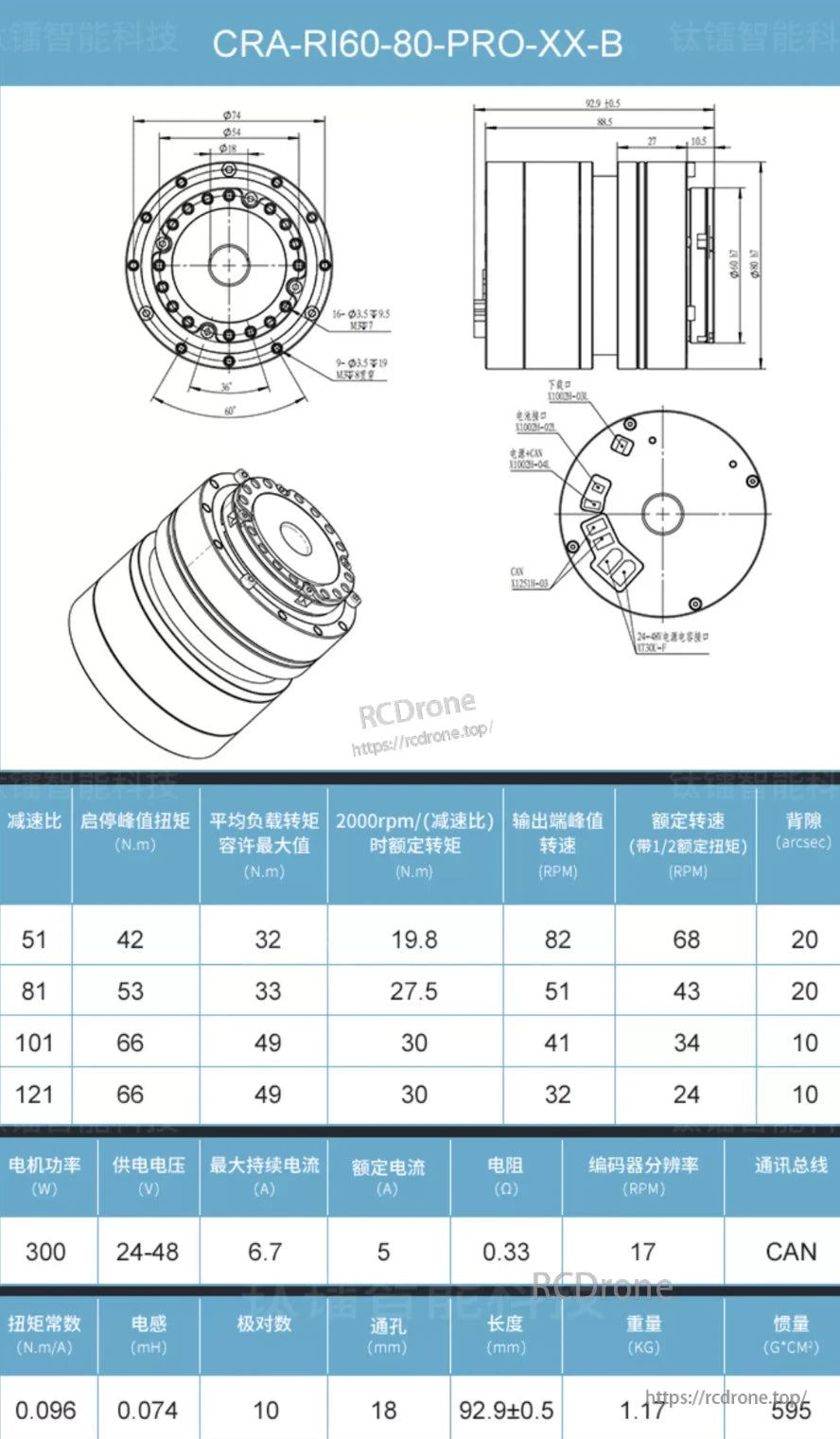
CRA-RI60-80-PRO-XX-B Robotergelenkmodul mit 300-W-Motor, 24–48 V Versorgung, CAN-Kommunikation, 17 U/min Encoderauflösung und mehreren Übersetzungsverhältnissen. Wichtige Spezifikationen sind Drehmoment, Geschwindigkeit, Stromstärke und Abmessungen.
Related Collections