







Ti5 ROBOT CRA-RI70-90-PRO Motor-Gelenkmodul 500W 24-48V 16Bit Encoder 51/81/101/121 Übersetzung
Ti5 ROBOT CRA-RI70-90-PRO Motor-Gelenkmodul 500W 24-48V 16Bit Encoder 51/81/101/121 Übersetzung
Ti5 ROBOT
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der Ti5 ROBOT CRA-RI70-90-PRO Motor ist ein leichtes Gelenkmodul-Motor, das für die Gelenkbetätigung in Robotern entwickelt wurde. Das Modul integriert wichtige Gelenkkomponenten wie Steuerplatine, Encoder und harmonische Reduzierer für eine kompakte Integration in robotische Systeme.
Hauptmerkmale
- Leichtes Gelenkmodul
- Kleine Größe, leistungsstarke Leistung
- Modularisierungskonzept
- Branchenspezifischer Vorteil in der Massenproduktion (angegeben)
- Alle zugrunde liegenden Hardwarekomponenten können gesteuert werden, und die Lokalisierungsrate kann 100 % erreichen (angegeben)
- Vollständige Software-Toolchain für die Roboterentwicklung zur Beschleunigung von Forschung und Entwicklung (angegeben)
Interne Modulkomponenten (Explosionsansicht Beschriftungen)
- 1. Motorrückdeckel
- 2. Steuerplatine
- 3. Encoder
- 4. Statorgehäuse
- 5. Motorrotor
- 6. Motorstator
- 7. Harmonische Reduzierer
- 8. Flexspline-Abdeckung
Drehmomentdichte Vergleichstext (wie gezeigt)
Vergleich der Drehmomentdichte von gängigen Gelenkprodukten (Nm/kg)
- Ti5 Roboter nächste Generation: 250+
- Eine amerikanische Marke: 254
- Ti5 Roboter Serienmodell: 192
- Eine chinesische Marke: 80.4
- Eine kanadische Marke: 53.5
- Eine koreanische Marke: 33.8
Technische Daten
| Parameter | Wert |
|---|---|
| Motor Modell | CRA-RI70-90-PRO-XX / CRA-RI70-90-PRO-XX-B |
| Übersetzungsverhältnis | 51 / 81 / 101 / 121 |
| Start-Stopp Spitzenmoment | 69 / 91 / 102 / 108 N.m |
| Maximal zulässiges durchschnittliches Lastmoment | 42 / 58 / 61 / 61 N.m |
| 2000 U/min/(Übersetzungsverhältnis) Nennmoment bei dieser Geschwindigkeit | 32 / 42 / 50 / 50 N·m |
| Ausgangs-End Spitzen-Drehzahl | 77 / 48 / 40 / 30 U/min |
| Nenn-Drehzahl | 61 / 38 / 30 / 25 U/min |
| Motorleistung | 500 W |
| Versorgungsspannung | 24-48 V |
| Maximaler Dauerstrom | 8.4 A |
| Nennstrom | 6.1 A |
| Encoder-Auflösung | 16 Bit |
| Rückraum | 20 / 20 / 10 / 10 / 10 Bogensekunden |
| Drehmomentkonstante | 0.118 N·m/A |
| Bohrung | 18 mm |
| Länge: Ohne Bremse / Mit Bremse | 73.5 ± 0.5 mm / 92 ± 0.5 mm |
| Gewicht: Ohne Bremse / Mit Bremse | 1.27 kg / 1.5 kg |
| Trägheit: Ohne Bremse / Mit Bremse | 596.4 g·cm² / 746.7 g·cm² |
Anwendungen
- Humanoide Roboter
- Roboterarme
- Exoskelette
- Quadruped-Roboter
- AGV-Fahrzeuge
- ARU-Roboter
Handbücher
Für Auswahlhilfen zu Reduktionsverhältnissen und Bremsoptionen kontaktieren Sie [email protected] or besuchen Sie https://rcdrone.top/.
Details

Kompakte Gelenkmodulgestaltung für Roboter, bei denen geringes Gewicht und hohe Integration wichtig sind.

Eine modulare Struktur integriert wichtige Gelenkhardware, um die Integration von Robotersystemen zu vereinfachen.


Kernkomponenten sind in ein Modul integriert, einschließlich der Steuerplatine, 16-Bit-Encoder und harmonischer Reduzierer.
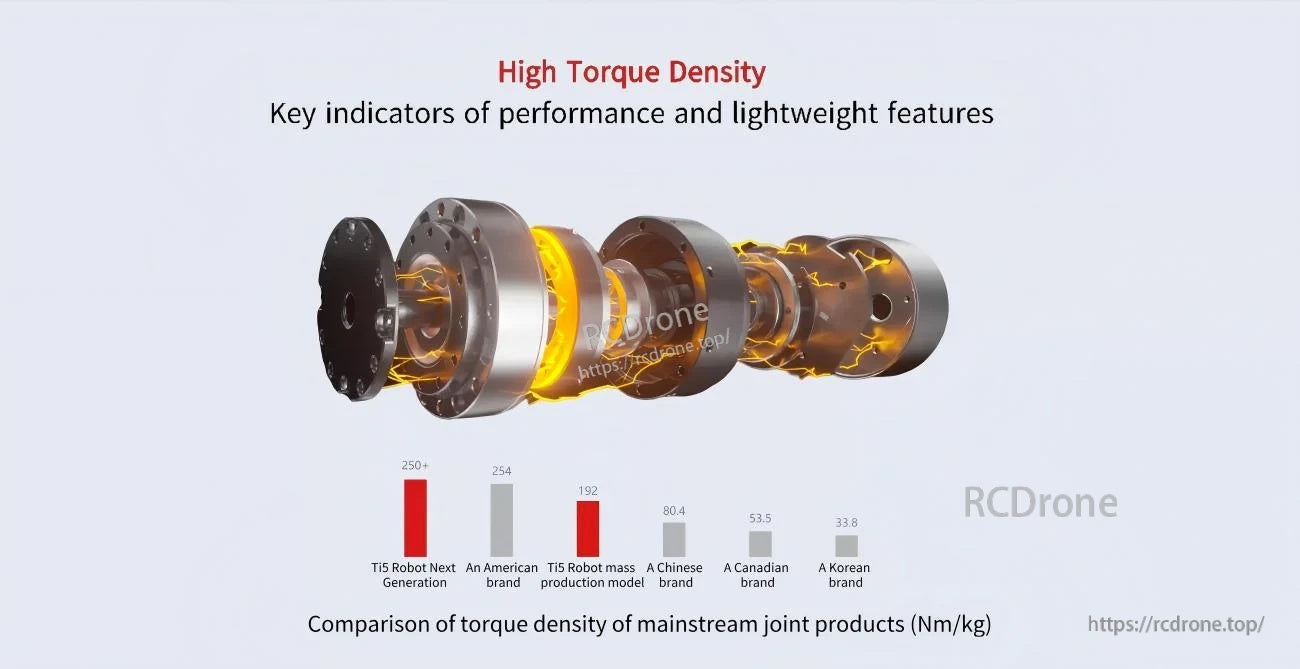
Ein Drehmoment-Dichte-Vergleichsdiagramm wird zur schnellen Bewertung der gängigen Gelenkmodule bereitgestellt.
Related Collections







