Ti5 Robot CRA-RI70-90-PRO-XX Harmonic Servo Joint, 500 W, 24–48 V, 17 Bit, CAN/EtherCAT, 51–121:1, IP65 (Bremsoption)
Ti5 Robot CRA-RI70-90-PRO-XX Harmonic Servo Joint, 500 W, 24–48 V, 17 Bit, CAN/EtherCAT, 51–121:1, IP65 (Bremsoption)
Ti5 Robot
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Der Ti5-Roboter CRA-RI70-90-PRO-XX ist ein integriertes Robotergelenkmodul, das einen ultradünnen Oberwellenreduzierer, einen bürstenlosen Drehmomentmotor, einen FOC-Servoantrieb und einen Absolutwertgeber in einem kompakten Hohlwellendesign kombiniert. Mit einer Nennleistung von 500 W, liefern 24–48 Vund Untersetzungsverhältnisse 51/81/101/121:1Es bietet ein hohes Drehmoment mit nahezu spielfreiem Antrieb und präziser Positionierung für Humanoide, Cobots, Kardanringe, mobile Plattformen und Exoskelette. Ein 17-Bit-Absolutwertgeber sorgt für eine präzise Servosteuerung, und die CAN- oder EtherCAT-Kommunikation vereinfacht die Systemintegration. Das Modul ist IP65 versiegelt und ist verfügbar mit oder ohne Bremse (-B-Variante).
Hauptmerkmale
-
Integriertes Harmonic-Servo-Gelenk: Untersetzungsgetriebe + BLDC-Drehmomentmotor + 17-Bit-Absolutwertgeber + FOC-Controller.
-
Hohes Drehmoment &Amp; geringes Spiel: bis zu 50 N·m Nenndrehmoment (verhältnisabhängig) mit ≤20/10 Bogensekunden Spiel.
-
Mehrere Verhältnisse: 51/81/101/121:1 um Drehzahl und Drehmoment auszugleichen.
-
Breites Angebot &Verstärker; Leistung: 24–48 V, 500 W, ausgelegt für 24/36/48 V Roboter.
-
Hohlwelle Ø14,5 mm zur Kabel-/Luftleitungsführung; 10 Polpaare Motor.
-
Kommunikation: DÜRFEN oder EtherCAT; Einzel- oder Doppel-Encoder-Optionen.
-
Schutz: IP65 Umweltversiegelung.
-
Bremsoption: CRA-RI70-90-PRO-XX-B inklusive Haltebremse für sicheres Abschalten.
Technische Daten
Modellfamilie: CRA-RI70-90-PRO-XX (Standard)/CRA-RI70-90-PRO-XX-B (mit Bremse)
| Artikel | Wert |
|---|---|
| Untersetzungsverhältnisse | 51/81/101/121 : 1 |
| Nenndrehmoment bei 2000 U/min/Verhältnis | 32/42/50/50 N·m |
| Spitzendrehmoment beim Start | 63/91/102/108 N·m |
| Max. zulässiges Lastdrehmoment (Durchschnitt) | 42/58/61/61 N·m | &
| Nenndrehzahl (½ Nenndrehmoment) | 61/38/30/25 U/min |
| Spitzenausgabegeschwindigkeit | 77/48/40/30 U/min |
| Gegenreaktion | 20 Bogensekunden (51,81); 10 Bogensekunden (101.121) |
| Motorleistung | 500 W |
| Versorgungsspannung | 24–48 V DC |
| Nenn-/maximaler Dauerstrom | 6,1 A/8,4 A |
| Phasenwiderstand/Induktivität | 0,38 Ω/0,33 mH |
| Drehmomentkonstante | 0,118 N·m/A |
| Motorpolpaare | 10 |
| Encoder | 17-Bit absolut (Einzel- oder Doppel-Encoder verfügbar) |
| Kommunikationsbus | DÜRFEN (EtherCAT je nach Option verfügbar) |
| Hohlwellenbohrung | Ø14,5 mm |
| Modullänge | 71,9 ± 0,5 mm (Standard)/97,4 ± 0,5 mm (-B) |
| Masse | 1,3 kg (Standard)/1,6 kg (-B) |
| Rotorträgheit (Ref.) | 594 g·cm² (Standard)/682 g·cm² (-B) |
| Schutzart | IP65 |
| Montage | Flanschmontage mit Gewindebohrungen |
Hinweise
• Die Leistungswerte variieren je nach gewähltem Verhältnis (51/81/101/121).
• „-B“ bezeichnet die Fabrik Bremse Option.
• Einzel-/Doppel-Encoder und CAN/EtherCAT sind wählbare Optionen.
Anwendungen
-
Humanoide und Serviceroboter: Hüft-, Knie-, Schulter- und Ellbogengelenke, die kompakte Module mit hohem Drehmoment erfordern.
-
Kollaborative/Manipulatorarme: präzise, spielarme Gelenke für 6-/7-Achs-Cobots.
-
Kardanringe &Amp; Schwenk-Neige-Einheiten: sanfte und hochpräzise Positionierung durch Hohlwellenführung.
-
Mobile Roboter &Amp; Inspektion: Rad-/Aufhängungsbetätigung und Sensormasten mit Haltebremse.
-
Exoskelette & Rehabilitationsgeräte: leichte, drehmomentstarke Verbindungen.
-
Industrie/Elektro &Amp; Schiffsausrüstung: IP65-Gelenkbetätigung in rauen Umgebungen.
Details
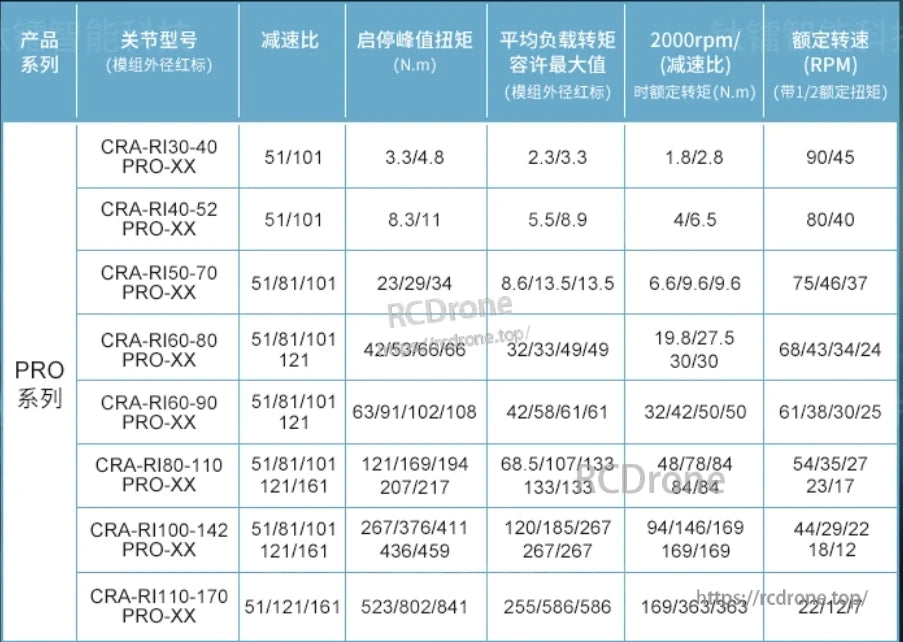
Zu den Spezifikationen der Ti5 Robot CRA Servo Joint PRO-Serie gehören Modellnummern, Übersetzungsverhältnisse, Spitzendrehmoment, Lastdrehmoment, Nenndrehmoment bei 2000 U/min und Nenndrehzahlen für verschiedene Konfigurationen.
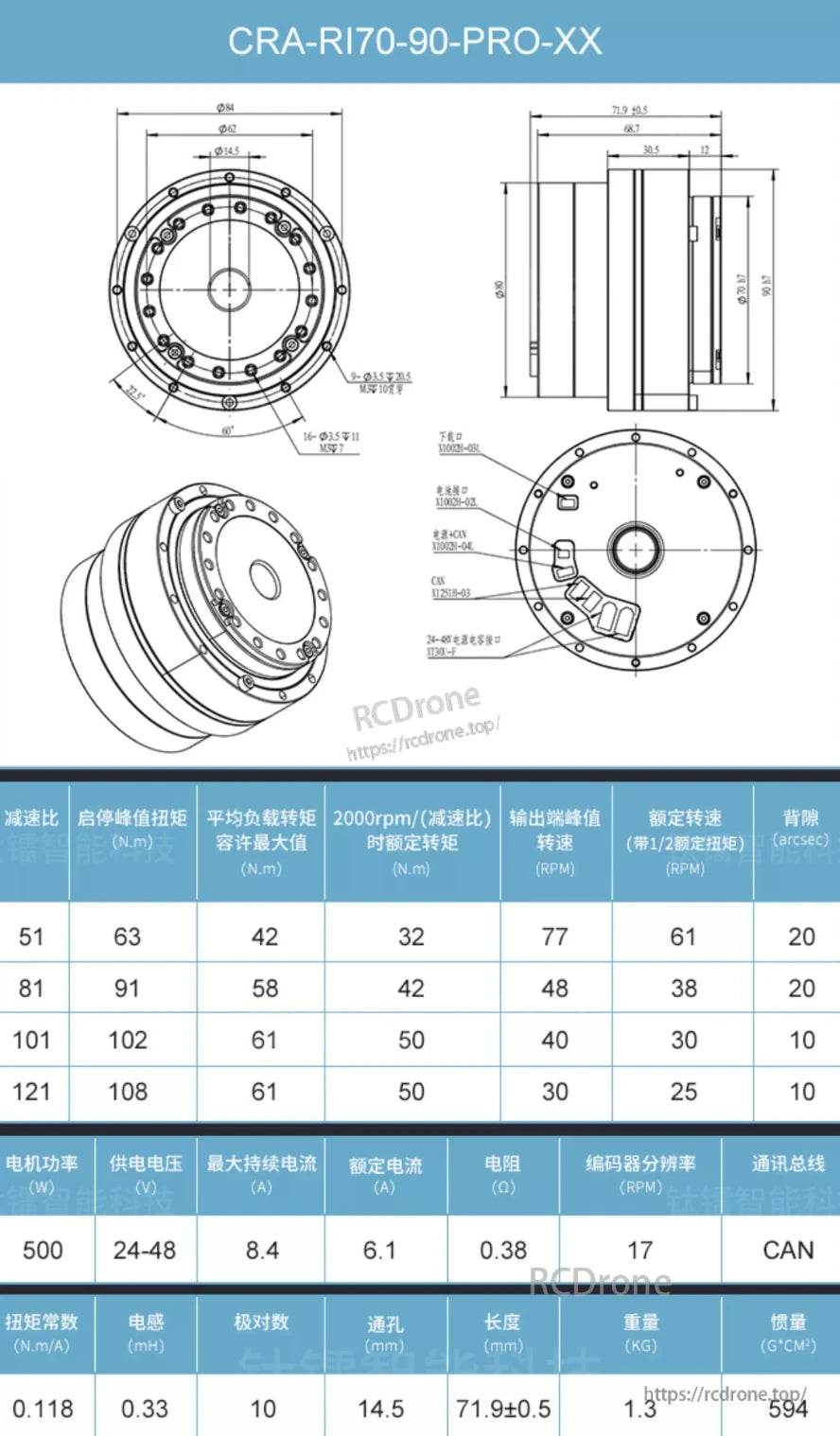
CRA-RI70-90-PRO-XX Servogelenkspezifikationen: 500-W-Motor, 24–48 V, CAN-Bus, 17 U/min Encoderauflösung, 1,3 kg Gewicht, mehrere Übersetzungsverhältnisse, Spitzendrehmoment bis zu 108 N.m, 594 g·cm² Trägheit.
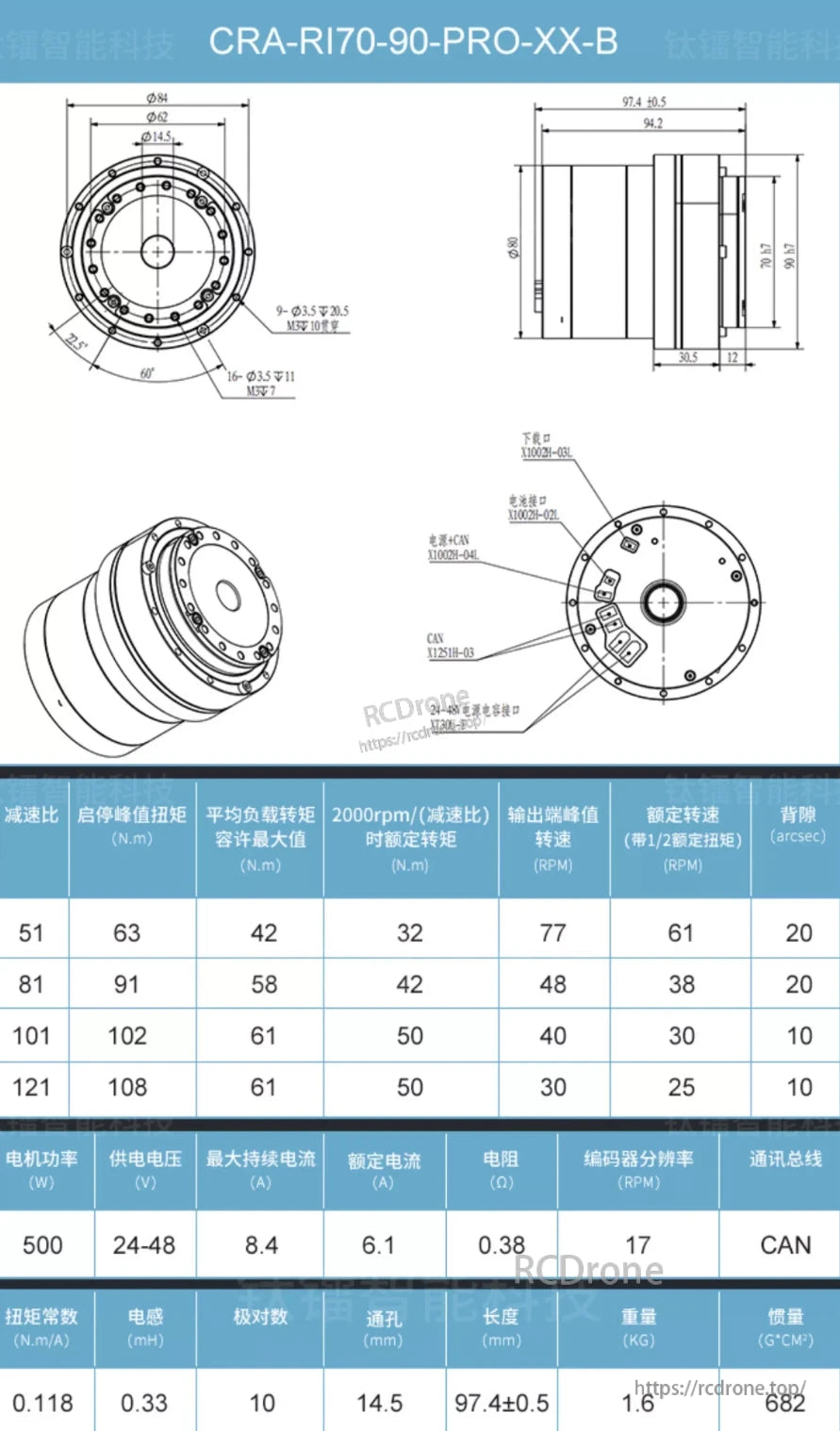
Spezifikationen des Servogelenks CRA-R170-90-PRO-XX-B: 500-W-Motor, 24–48 V, CAN-Bus, Encoderauflösung 17 U/min, 1,6 kg Gewicht, mehrere Übersetzungsverhältnisse mit bereitgestellten Drehmoment- und Geschwindigkeitsdaten.
Related Collections