








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-Achsen-Beschleunigungsmesser, Gyroskop, Inklinometer, ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Hz – 6-Achsen-Beschleunigungsmesser, Gyroskop, Inklinometer, ROS/Matlab
WitMotion
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der WitMotion HWT601-AGV-485 ist ein 6-Achsen-Haltungs-/Richtungsensor, der für AGV-Roboter, Drohnen und autonome Plattformen entwickelt wurde. Er kombiniert 3-Achsen-Beschleunigung + 3-Achsen-Winkelgeschwindigkeit und gibt 3-Achsen-Winkel &und Quaternion über RS485 (Modbus) mit bis zu 200 Hz aus. Das Modul verfügt über Kalman-Dynamikfilterung, hochpräzise Drehplattformkalibrierung, automatische/manuelle Bias-Erfassung, Notstromversorgung zur Speicherung der Richtung bei Stromausfall und ein IP67 wasserdichtes/staubdichtes Gehäuse. Es unterstützt auch mehrstufige Kaskadierung (bis zu 32 Einheiten) für synchronisierte Haltungsmessungen.
Hauptmerkmale
-
Hochpräziser Winkel: XY-Genauigkeit 0,1°; Z-Genauigkeit 0,1° (HWT601-AGV-485) / 0,15° (WT601-AGV-485).
-
Stabiler Gyroskop-Offset: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
Breite Eingangs 9–36 V, Betriebsstrom ≈ 8 mA @12 V.
-
RS485 Modbus, Baud 4.800–230.400 bps.
-
Abtastung: Anfrage-Antwort-Lesung bis zu 200 Hz.
-
Algorithmus: Kalman-Filterfusion und dedizierter AGV-Richtungsalgorithmus.
-
Software: kostenlose PC-Suite mit Live-Dashboards, Kurvenplots, 3D-Visualisierung (Auto/Kugel/Würfel/Flugzeug), Konfiguration (Offset, Winkelreferenz, Beschleunigungskalibrierung, Skalierungsfaktoren), Datenaufzeichnung &und direkte Speicherung, sowie Matlab-Import.
-
Entwicklerfreundlich: Beispielprogramme und Codeunterstützung für ROS, Linux, C/C#, Python.
-
Umwelt: IP67, -40~80 °C (Tischvariante -40~85 °C gezeigt).
-
Kaskadierend: bis zu 32 Sensoren über RS485 für gleichzeitige Neigungsmessung.
Installationsrichtlinien
-
Befestigen Sie den Sensor auf einer festen, flachen, stabilen Oberfläche; unebene Untergründe verursachen Winkelabweichungen (siehe ABB.1–2).
-
Halten Sie die Sensorachse parallel zur gemessenen Achse; vermeiden Sie Inter-Achsen-Winkel (siehe ABB.3–4).
-
Dieses Modell unterstützt nur die horizontale Installation.
Software &und Visualisierung
-
Leistungsstarkes Daten-Dashboard (Winkel, Rate, Beschleunigung, Magnetfeld, Quaternion, Ports, Temperatur, Spannung usw.).
-
Konfigurationspanel: Baudrate, Geräteadresse, automatische Bias-Akquisition, Z-Achsen-Reset, Beschleunigungs-Kalibrierung, Winkelreferenz, manuelle positive/negative Kalibrierung und Skalierungsfaktoren.
-
3D-Modelle für intuitive Bewegungsüberwachung und Echtzeit-Kurven mit dynamischen Updates.
-
Raw-Datenansicht und Dateispeicherung zur einfachen Sammlung; Matlab Analyse-Import unterstützt.
-
ROS IMU INS Demos: Visualisierung der Haltungsverfolgung und Anzeige der Haltungsdaten (Gier/Roll/Nicken, Winkelgeschwindigkeit, lineare Beschleunigung).
html
Technische Daten
Schnittstelle &und Leistung
| Artikel | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Schnittstelle / Protokoll | RS485 / Modbus | RS485 / Modbus |
| Baudrate | 4.800–230.400 bps | 4.800–230.400 bps |
| Ausgabedaten | 3-Achsen Beschleunigung, Winkelgeschwindigkeit, Winkel, Quaternion | Gleich |
| Abtastfrequenz | Bis zu 200 Hz (Anfrage–Antwort) | Bis zu 200 Hz |
| XY-Winkelgenauigkeit | 0,1° | 0. 1° |
| Z-Winkelgenauigkeit (360°-Drehfehler) | 0,1° | 0,15° |
| Beschleunigungsbereich / Auflösung | ±4 g / 0,0001 g/LSB | Gleich |
| Gyroskopbereich / Auflösung | ±250 °/s / 0,0122 (°/s)/LSB | Gleich |
| Winkelbereich / Auflösung | XZ: ±180°; Y: ±90° / 0,0059° | Gleich |
| Gyroskop-Bias-Instabilität (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| Temperaturkoeffizient (XYZ) | 0,002°/°C | 0.002°/°C |
Elektrisch, Mechanisch &und Umwelt
-
Versorgungsspannung: 9–36 V; Betriebsstrom: ≈ 8 mA (12 V)
-
Abmessungen: 55 × 36.8 × 24 mm; Kabellänge: 1 m
-
Schutz: IP67
-
Betriebstemperatur: -40~80 °C (Tischvariante zeigt auch -40~85 °C)
-
Installation: Nur horizontale Montage
-
Kaskadierung: Bis zu 32 Einheiten über RS485
Anwendungsbereiche
AGV/AMR und mobile Roboter, Drohnen/UAVs, unbemannte Logistikfahrzeuge und Module zur autonomen Fahrwahrnehmung.
Modellbenennung &und Auswahl
-
HWT601-AGV-485 – höhere Z-Achsen-Genauigkeit (0.1°) und geringere Z-Bias-Instabilität (2°/h).
-
WT601-AGV-485 – Standard-Z-Achsen-Spezifikationen (0,15°, 5°/h).
Wählen Sie HWT601, wenn die Präzision der Z-Achse entscheidend ist.
Details

Hochpräziser 6-Achsen-Haltungssensor mit 3-Achsen-Beschleunigung, Winkelgeschwindigkeit, Winkel und Quaternion. Verfügt über einen AGV-Kopfalgorithmus, IP67-Schutz, Kalman-Filterung, automatische Bias-Akquisition und PC-Softwareunterstützung.
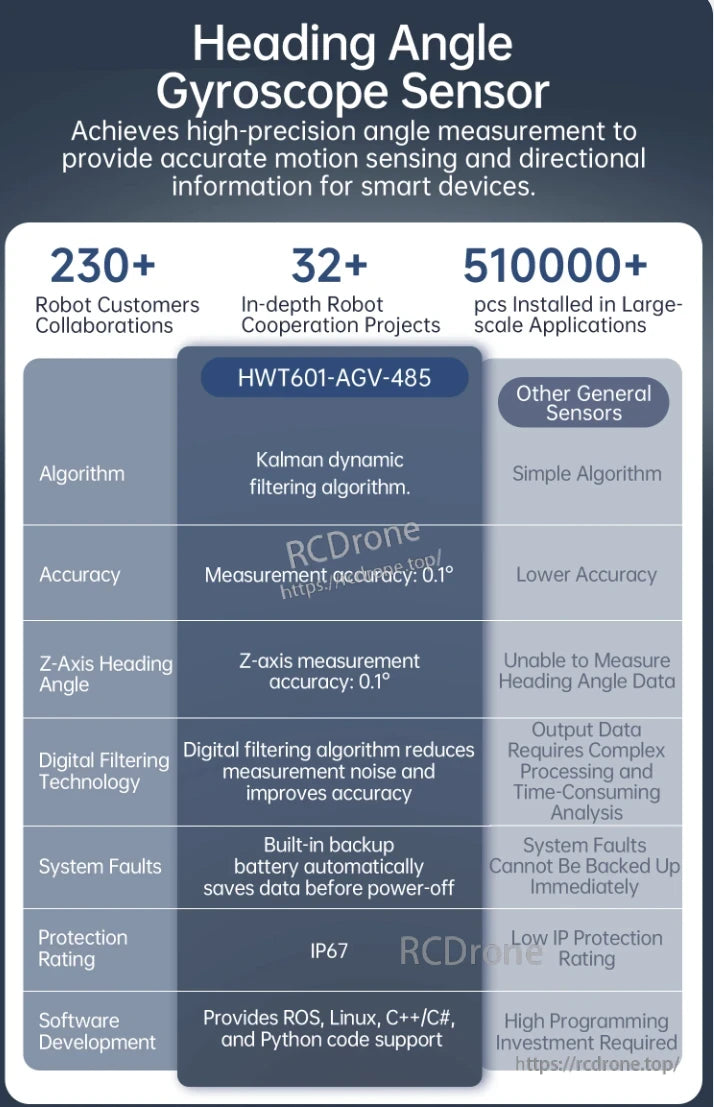
Der Heading Angle Gyroscope Sensor HWT601-AGV-485 bietet hochpräzise Winkelmessungen mit Kalman-Filterung, 0,1° Genauigkeit, digitale Rauschunterdrückung, IP67-Schutz und unterstützt ROS, Linux, C++ und Python. Über 230 Robotik-Kooperationen und mehr als 510.000 Installationen.
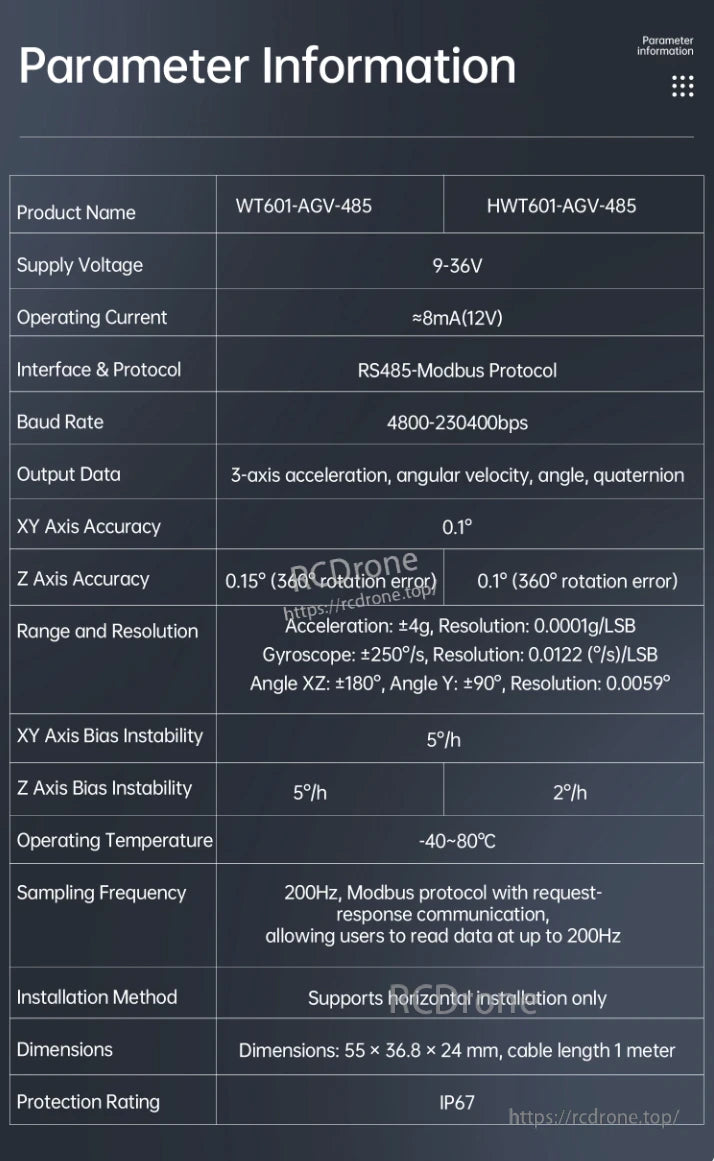
Der HWT601-AGV-485 IMU bietet eine Versorgungsspannung von 9-36V, RS485-Modbus, 200Hz Abtastung, ±4g Beschleunigung, ±250°/s Gyroskop, IP67 Bewertung, -40~80°C Betrieb. Er liefert präzise, hochauflösende 3-Achsen-Daten.
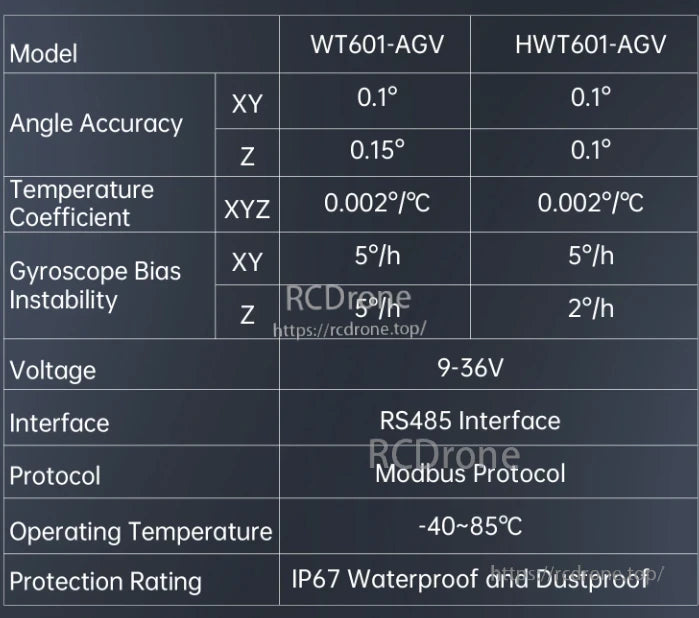
Der HWT601-AGV IMU bietet eine Winkelgenauigkeit von 0,1° in den XY- und Z-Achsen mit einem Temperaturkoeffizienten von 0,002°/°C über XYZ. Die Bias-Instabilität des Gyroskops beträgt 5°/h (XY) und 2°/h (Z). Er arbeitet mit 9–36V, verwendet RS485 mit Modbus und funktioniert bei Temperaturen von -40 bis 85°C. Mit der IP67-Bewertung bietet er wasserdichten und staubdichten Schutz. Die WT601-AGV-Variante hat ähnliche Spezifikationen, jedoch eine Z-Achsen-Genauigkeit von 0,15° und eine Z-Achsen-Bias-Instabilität von 5°/h. Beide Modelle gewährleisten eine zuverlässige Leistung in anspruchsvollen Umgebungen.
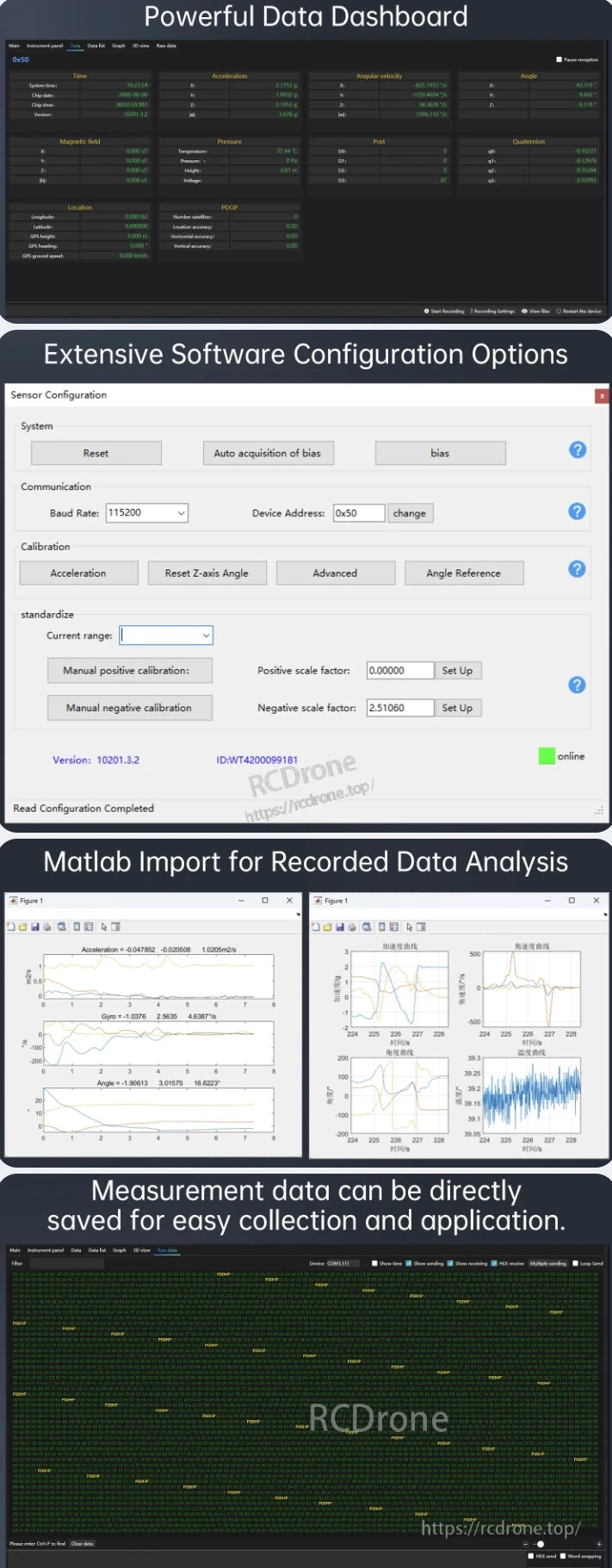
Leistungsstarkes Daten-Dashboard mit Echtzeit-Sensormessungen, umfangreicher Softwarekonfiguration, MATLAB-Import zur Analyse und direkter Datenspeicherung für eine einfache Sammlung und Anwendung.
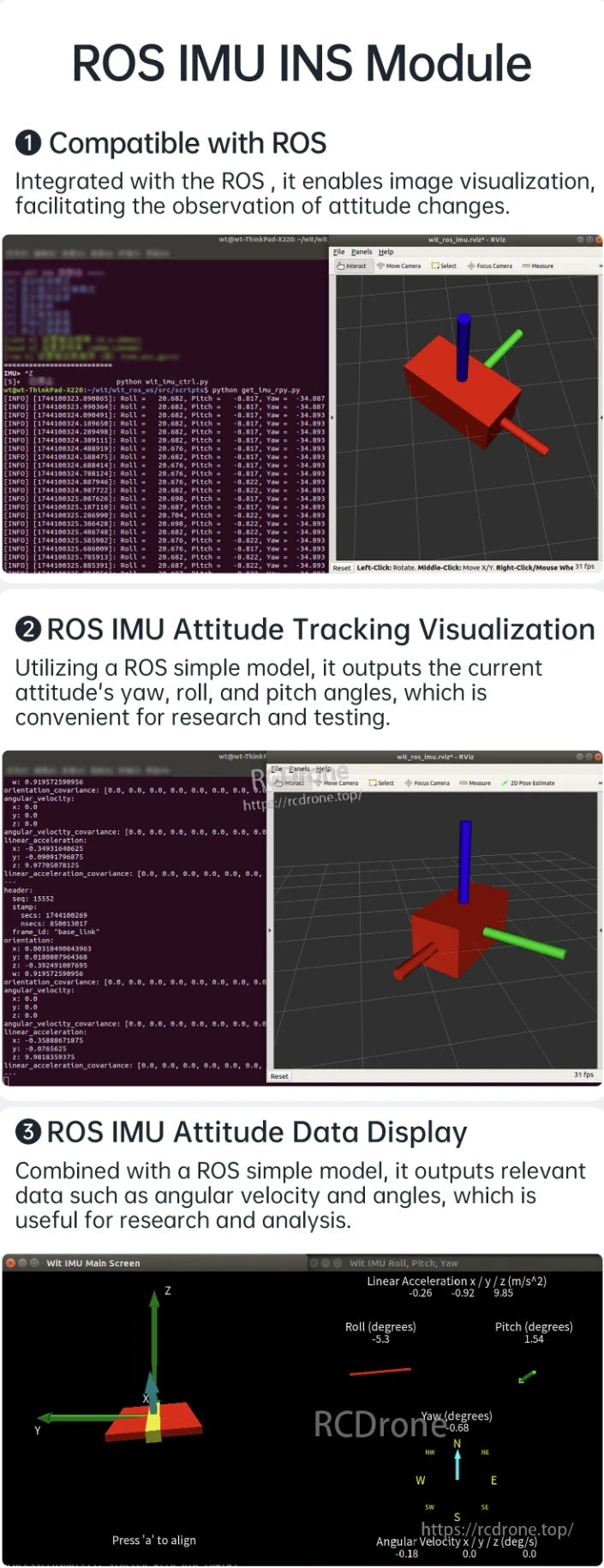
Das ROS IMU INS Modul bietet ROS-Kompatibilität, visualisiert die Haltungstracking und zeigt in Echtzeit Roll-, Nick-, Gierwinkel, Winkelgeschwindigkeit und lineare Beschleunigung für Forschung und Analyse an.
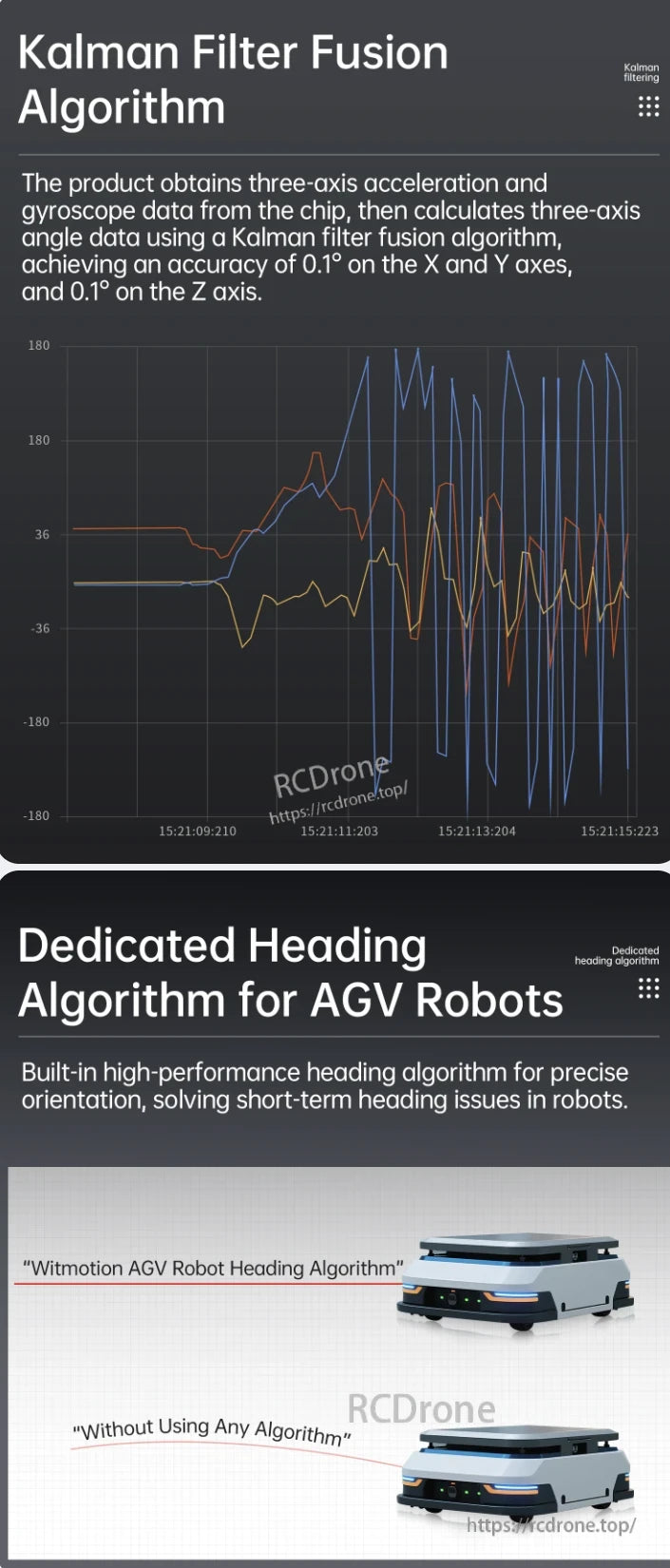
Das WitMotion HWT601 AGV IMU liefert präzise 3-Achsen-Winkeldaten mit einer Genauigkeit von 0,1° unter Verwendung der Kalman-Filterfusion. Sein spezieller Kursalgorithmus sorgt für eine stabile Roboterorientierung und verbessert die Leistung erheblich im Vergleich zu Systemen ohne solche Algorithmen.
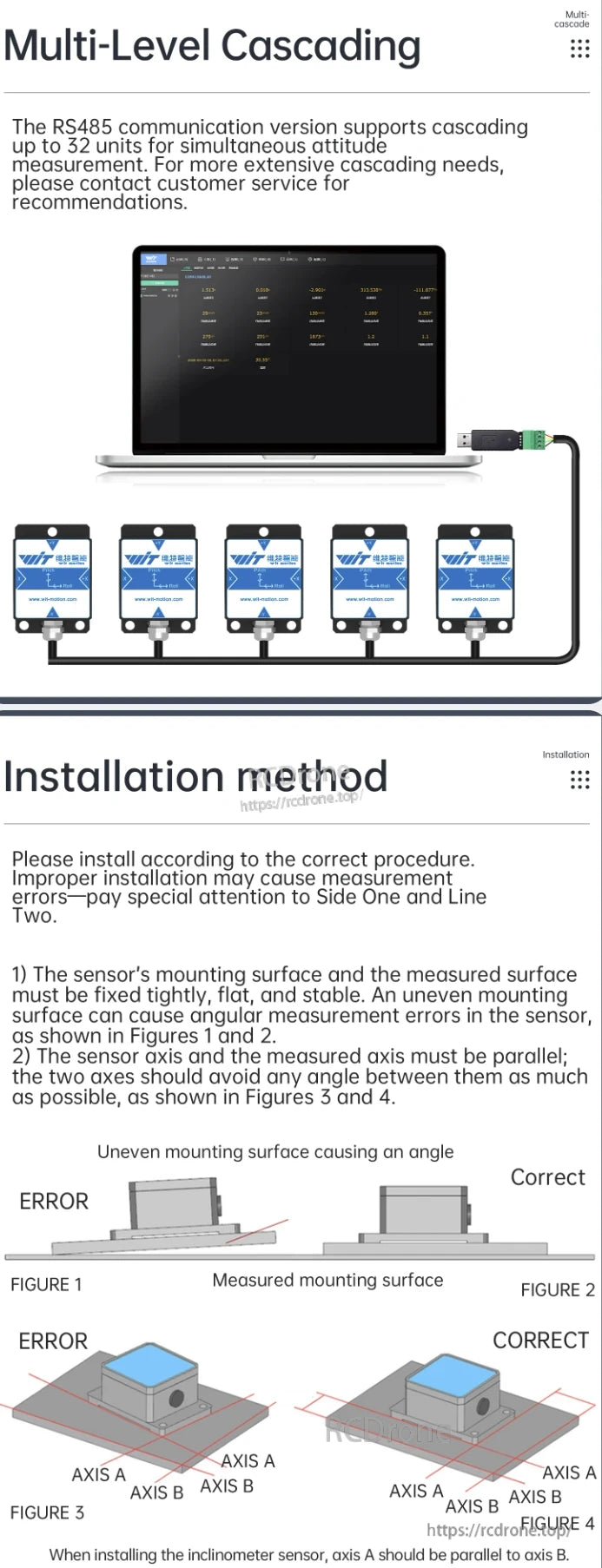
Das WitMotion HWT601 AGV IMU unterstützt bis zu 32 kaskadierende Einheiten über RS485 zur Haltungsmessung. Stellen Sie eine flache, stabile Montage und ausgerichtete Achsen für Genauigkeit sicher.
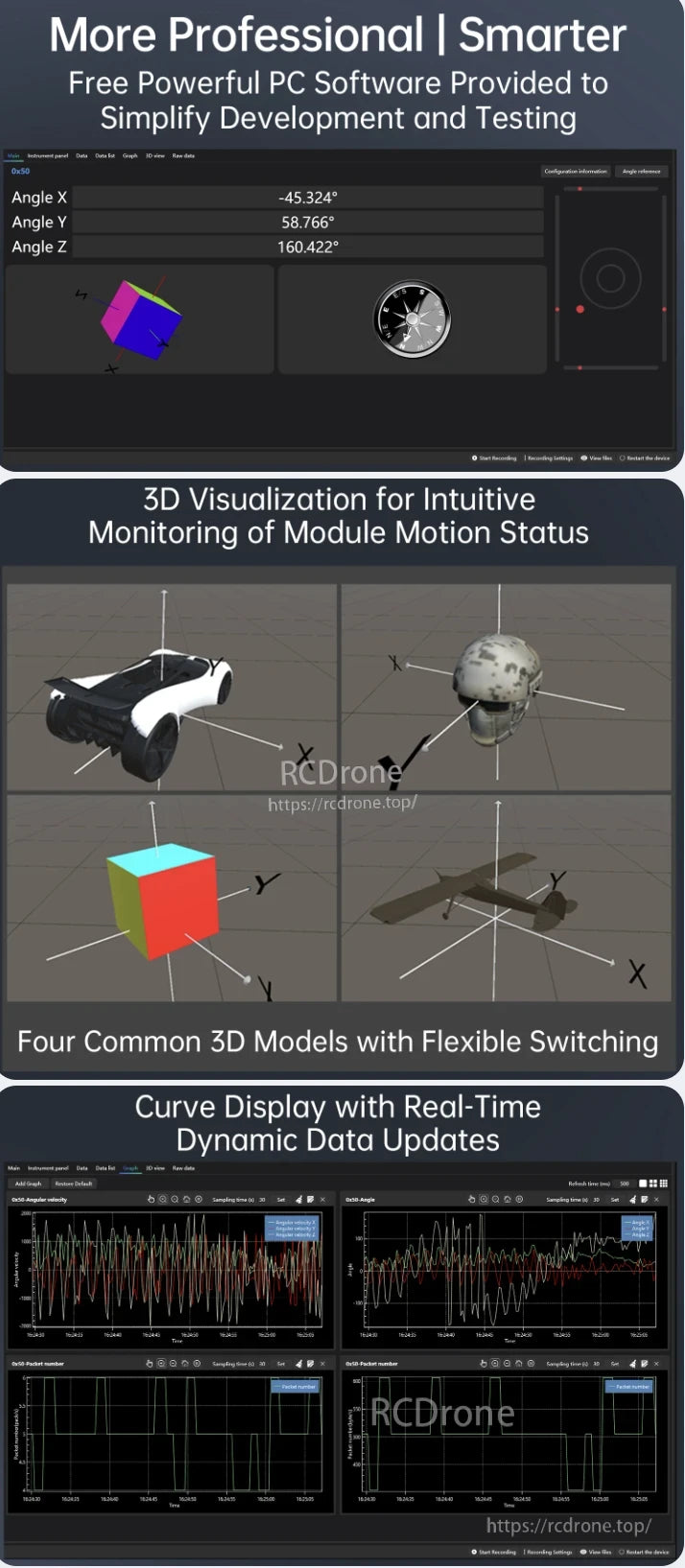
Professionelle PC-Software für das WitMotion HWT601 AGV IMU bietet eine Echtzeit-3D-Visualisierung, Winkelüberwachung und dynamische Kurvendisplays.Funktionen umfassen intuitive Bewegungsverfolgung, flexibles Modellwechseln und Live-Datenaktualisierungen für eine effiziente Entwicklung und Tests.
Die unterstützende Dokumentation umfasst Beispielprogramme für STM32, Arduino, 51 UART, Windows C++ und Matlab, um Entwicklern zu helfen, das Produkt mithilfe von Tutorials und Codebeispielen anzuwenden.
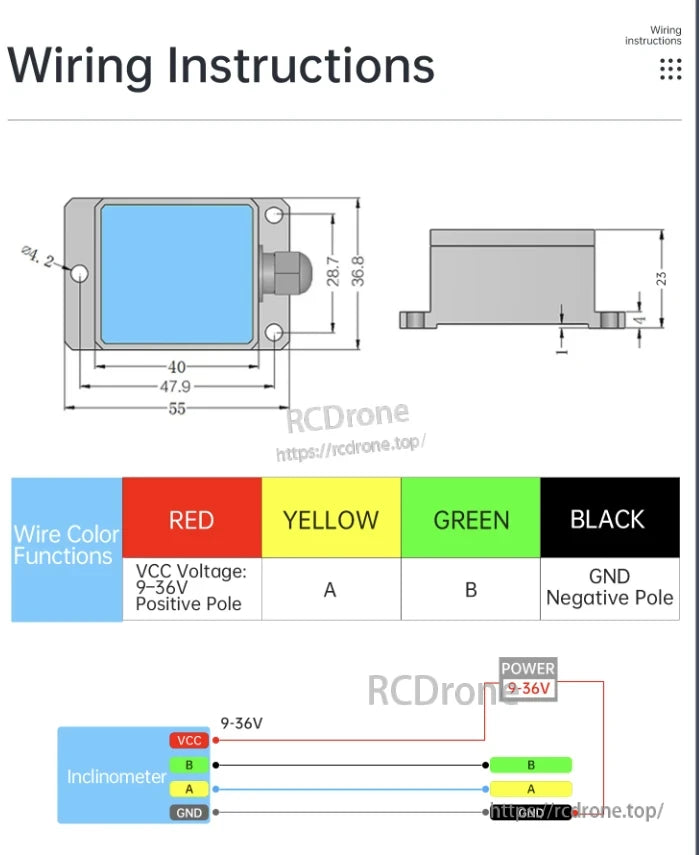
WitMotion HWT601 AGV IMU Verdrahtungsanleitung: rot (9-36V), gelb (A), grün (B), schwarz (GND). Abmessungen und Anschlussdiagramm bereitgestellt.

WitMotion HWT601 AGV IMU für Drohnen, autonomes Fahren, mobile Roboter und unbemannte Logistikfahrzeuge.
Related Collections








