WitMotion WT61 IMU (MPU6050) – 6-Achsen-Beschleunigungsmesser + Gyroskop mit Winkel-Ausgabe, Kalman AHRS, TTL-Seriell, 20/100 Hz, 3,3–5 V für Arduino/Raspberry Pi/PC
WitMotion WT61 IMU (MPU6050) – 6-Achsen-Beschleunigungsmesser + Gyroskop mit Winkel-Ausgabe, Kalman AHRS, TTL-Seriell, 20/100 Hz, 3,3–5 V für Arduino/Raspberry Pi/PC
WitMotion
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
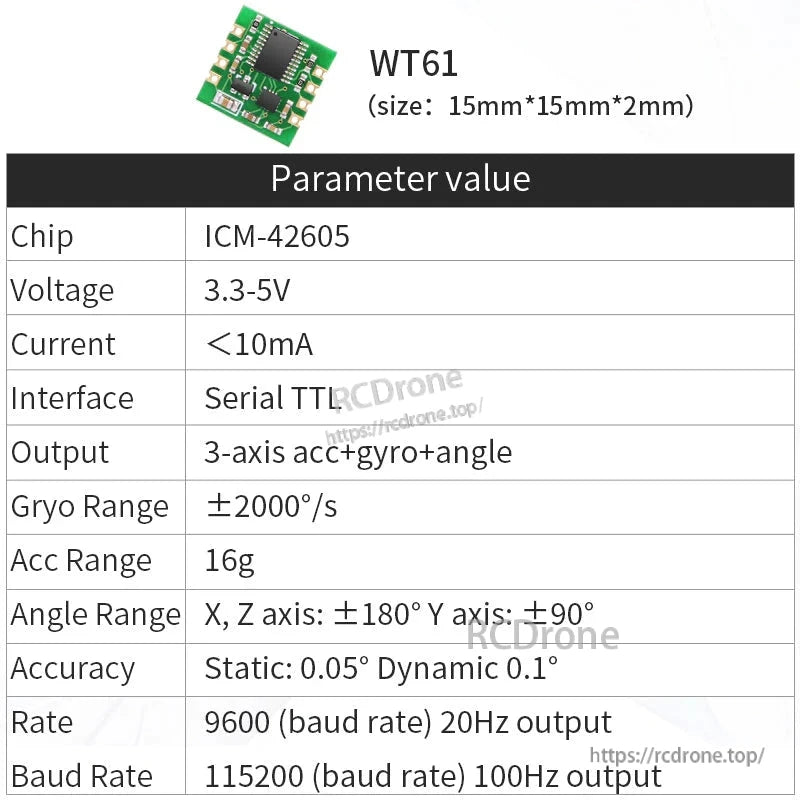
Der WitMotion WT61 ist ein 6-Achsen-MEMS-Haltungssensor, der 3-Achsen-Beschleunigung, 3-Achsen-Winkelgeschwindigkeit und fusionierte Winkel (Roll/Pitch/Gier) ausgibt. Er verwendet einen 48 MHz MCU mit einem eingebetteten IMU (MPU6050, gemäß Modellbezeichnung) und WitMotions dynamischer Fusion + Kalman-Filterung, um hohe Stabilität, geringes Rauschen und präzise Winkelresultate zu liefern. Das Modul kommuniziert über Serielle TTL und ist winzig (15,24 × 15,24 × 2 mm, ~1 g), was es einfach macht, in IoT-Geräte, Roboter, mobile Maschinen, strukturelle Überwachung, Unterhaltungselektronik und VR-Gadgets einzubetten.
Hauptmerkmale
-
3 Ausgänge: Beschleunigung, Winkelgeschwindigkeit und Winkel (Haltung).
-
Fusionsalgorithmus: dynamische Fusion + Kalman-Filterung; Satelliten-Grad-Haltungsalgorithmus-Herkunft; Winkelgenauigkeit 0,05° (statisch), 0,1° (dynamisch).
-
Hochwertige Hardware: 48 MHz Kern-MCU, stabiler Stromchip, vergoldete Kupferpads, eingebetteter MEMS-Sensor.
-
Klein &und leicht: 15,24 × 15,24 × 2 mm, ~1 g; horizontale/vertikale Montage unterstützt.
-
Wählbare Datenraten &und Baud: 20 Hz / 100 Hz Rücklaufquote; 9600 / 115200 bps.
-
Android-App + Windows-Software: Echtzeit-Diagramme, Aufzeichnung, Rohdatenansicht, TXT-Export, 3D-Demo-Viewer und umfangreiche Konfiguration (Bandbreite, Ausgabegeschwindigkeit, Platzierung, Schwellenwerte, Schlafmodus, Z-Achsen-Reset).
-
SDK &und Beispiele: Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C++.
-
Dokumentation &und Werkzeuge: Datenblatt, Handbuch, MiniIMU.exe, CH340/CP2102 Treiber, Demovideos.
-
Qualität &und Unterstützung: Fabrik-Kalibrierungsbericht angezeigt; RoHS, CE, ISO 9001.
Technische Spezifikationen
| Artikel | Details |
|---|---|
| Modell / Marke | WT61 / WitMotion |
| Versorgungsspannung | 3.3 V ~ 5 V |
| Strom | < 10 mA |
| Schnittstelle | Seriell TTL |
| Ausgabeinhalt | 3-Achsen-Beschleunigung, 3-Achsen-Winkelgeschwindigkeit, Winkel |
| Beschleunigungsbereich | ±2/±4/±8/±16 g (adaptiv) |
| Gyro-Bereich | ±2000 °/s |
| Winkelbereich | X, Z: ±180°; Y: ±90° |
| Winkelgenauigkeit | X/Y statisch 0.05°; dynamisch 0.1° |
| Stabilität (Bias) | Beschleunigung: 0.01 g; Gyro: 0.05 °/s; Winkel (XY): 0.01° |
| Rückgabewert | 20 Hz / 100 Hz |
| Baudrate | 9600 / 115200 bps |
| Beschleunigungsauflösung | ±2 g: 0.061 mg/LSB (16384 LSB/g); ±4 g: 0.12 mg/LSB (8192 LSB/g); ±8 g: 0.25 mg/LSB (4096 LSB/g); ±16 g: 0.5 mg/LSB (2048 LSB/g) |
| Größe / Gewicht | 15.24 × 15.24 × 2 mm (0.6″ × 0.6″ × 0.08″) / ~1 g |
| Betriebstemperatur | –40 °C bis +85 °C |
| Achsen Definition | Kartesische Koordinaten, Rechte-Hand-Regel |
| Montage | Horizontal oder Vertikal |
Pinbelegung &und Mechanisch
Platine Umriss (mm): A = 15,24, B = 15,24, C = 2,54, D = 12,7, E = 2.
Pins:
| # | Name | Funktion |
|---|---|---|
| 1 | D0 | NC reserviert |
| 2 | VCC | 3.3–5 V |
| 3 | RT | Serielle Daten Eingabe, TTL-Niveau |
| 4 | TX | Serielle Daten Ausgabe, TTL-Niveau |
| 5 | GND | Erde |
| 6 | SWIM | SWIM-Daten-Schnittstelle |
| 7 | D2 | NC reserviert |
| 8 | VCC | 3.3–5 V |
| 9 | SCL | NC reserviert |
| 10 | SDA | NC reserviert |
| 11 | GND | Erde |
| 12 | D3 | NC reserviert |
MCU Verdrahtung (Diagramm gezeigt): TTL seriell zu Host-MCU mit TX↔RX Kreuzverbindung (VCC, TX, RX, GND).
Software, Apps &und Werkzeuge
-
Android App: Verbindung über USB-zu-TTL + Telefon OTG; Echtzeit-Diagramme für Acc/Gyro/Winkel; Aufzeichnen Schaltfläche; Module Menü (3-Achsen / 6-Achsen / 9-Achsen / BLE5.0 / WT901-WIFI); umfangreiche Konfigurations Seiten (Acc-Kalibrierung, Installationsrichtung, Abrufrate, Messbandbreite, statische Erkennungsschwelle, Musterauswahl).
-
Windows-PC (MiniIMU.exe): Live-Haltungsmessgeräte, Echtzeitkurven („Felsfeste Datenmessung“), Daten Speicherung &und Export (rohe und analysierte Daten im TXT/CSV-Format), Konfigurationsmenü (Baudrate 115200, Modus=Seriell, Richtungswahl, Bandbreite e.g., 94 Hz, Schlafmodus, Z-Achse auf 0° zurücksetzen).
-
3D-Demo: visualisiert die Bewegung des Sensors; 3D-Quellcode angeboten (wie angegeben).
-
Testvorrichtung: optionale Plug-and-Play-Klemme für Verkabelung ohne Löten (separat verkauft).
Algorithmen &und Leistung
-
WitMotion-Algorithmus × Kalman-Filter: abgeleitet von Luft- und Raumfahrt-Satelliten-Haltungsermittlungs Methoden; kombiniert kinetische Fusion, digitale Filterung, Zustandsabschätzung; liefert die angegebene 0,05°/0.1° Winkelgenauigkeit und hervorragende Bias-Stabilität/niedriges Rauschen (Diagramm und Abzeichen angezeigt).
Typische Anwendungen
IoT-Geräte, Umweltüberwachung, Schutz von Gebäudestrukturen, Robotik &und Automatisierung, Öl &und Energie, mobile Maschinen, Bergbauindustrie, Unterhaltungselektronik, VR-Gadgets.
Konformität &und Unterstützung
-
Gezeigte Zertifikate: Kalibrierungsbericht, RoHS, CE, ISO 9001.
-
Vergleichskartenhinweise: werkseitig getestet vor dem Versand, SDK verfügbar, 12-Monats-Garantie, lebenslange technische Unterstützung von WitMotion R&und D.
Hinweise &und Zubehör
-
Inklusive: WT61-Modul.
-
Optional: USB-zu-TTL-Konverter, Telefon-OTG-Adapter, Acryl Testvorrichtung Klemme.
-
Verwenden Sie die Rechts-Hand-Koordinaten Konvention und folgen Sie den horizontalen/vertikalen Installationsanweisungen, die in der Software angezeigt werden, um die beste Genauigkeit zu gewährleisten.
Details

WitMotion WT61 IMU bietet eine Pitch-Genauigkeit von 0,05 Grad, digitale Filterung, Fusionsalgorithmus und umfasst Beschleunigung, Gyroskop, Winkel, Vibration, MCU und Filterfunktionen.

WitMotion WT61 IMU bietet 3-Achsen-Beschleunigung, Gyroskop und Winkel-Ausgabe. Es unterstützt 3,3V-5V, niedrigen Strom, serielle TTL, ±2/4/8/16g adaptive Reichweite, hohe Genauigkeit, kompakte Größe, geringes Gewicht und einen breiten Temperaturbereich.

WitMotion WT61 IMU bietet hohe Präzision mit Kalman-Filterung, Zertifizierungen umfassen RoHS, CE, ISO-9001. Funktionen: 48MHz MCU, MEMS-Sensor, stabiler Stromchip und goldbeschichtete Kupfer-Schnittstelle.

WitMotion-Algorithmus x Kalman-Filter. Der WitMotion-Algorithmus stammt aus dem Algorithmus zur Bestimmung der Satellitenhaltung in der Luft- und Raumfahrt, kombiniert mit Kalman-Filterung und dynamischer Bewegungsfusion. Winkelgenauigkeit: X-, Y-Achse: 0,05° (statisch), 0,1° (dynamisch). Das Diagramm zeigt die Winkelwerte über die Zeit, wobei blaue, rote und gelbe Linien verschiedene Messungen oder gefilterte Ausgaben darstellen. Zeitstempel reichen von 15:21:09:210 bis 15:21:15:223. Die vertikale Achse reicht von -180 bis 180 Grad.

WitMotion WT61 IMU für IoT, Umweltüberwachung, Robotik, Automatisierung, Bergbau, Brücken, VR-Gadgets und industrielle Anwendungen.

WitMotion IMU bietet hohe Genauigkeit, Stabilität, kompakte Größe, überlegene Komponenten, SDK, Werksprüfungen und lebenslangen Support.Es umfasst Kalman-Filterung, Fusionsalgorithmus und eine 12-monatige Garantie, die andere übertrifft.

Der WitMotion WT61 IMU verfügt über ein 12-poliges Layout mit VCC, GND, TX, RX, SCL, SDA, SWIM und reservierten Anschlüssen; enthält Größenangaben in mm.

Der WitMotion WT61 IMU verbindet sich über USB mit einem OTG-Adapter für die Datenanzeige und -aufzeichnung auf Smartphones. Die multifunktionale Android-App zeigt Echtzeit-Sensordaten an, einschließlich Winkel, Beschleunigung und Zeitstempel, mit Optionen zur Konfiguration und Datenprotokollierung.

Der WitMotion WT61 IMU bietet eine einfache Einrichtung, Plug-and-Play-Funktionalität und Echtzeit-Haltungsmessungen mit Winkelmessungen.

Der WitMotion WT61 IMU bietet Kalibrierung, Echtzeitmessung und Datenexport. Zeigt und speichert Beschleunigung, Winkelgeschwindigkeit, Magnetfeld und Rohdaten im TXT-Format.

3D-Demo zeigt die Sensorbewegung intuitiv an. SDK unterstützt Matlab, Python, Raspberry Pi, STM32, ROS, Arduino und C++/C#. TTL-Seriellverbindung mit MCU; TX und RX sind gekreuzt verbunden.

3D-Demo visualisiert die Sensorbewegung mit Auto-, Helm-, Würfel- und Drohnenmodellen. SDK unterstützt Matlab, Python, Raspberry Pi, STM32, ROS, Arduino und C++/C#. Serielle Verbindung über TTL verbindet MCU und Modul mit gekreuzt verbundenem TX und RX.

IMU-Tests umfassen eine 3-Achsen-Drehscheibe, Vibrationsmessungen, Temperaturextreme, Alterung und Hochtemperaturevaluierungen.


WitMotion WT61 IMU bietet eine Rücklaufrate von 20-100Hz, eine Spannung von 3,3-5V und erkennt Beschleunigung, Winkel und Gyroskop. Unterstützt TTL-Schnittstelle, kompatibel mit Android, PC, MCU und Arduino.
Related Collections