WitMotion WT61C Hochpräziser Beschleunigungssensor (MPU6050) – 6-Achsen Acc+Gyro+Winkel AHRS IMU für Arduino / TTL & RS232
WitMotion WT61C Hochpräziser Beschleunigungssensor (MPU6050) – 6-Achsen Acc+Gyro+Winkel AHRS IMU für Arduino / TTL & RS232
WitMotion
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der WitMotion WT61C ist ein kostengünstiges 6-Achsen AHRS IMU, das einen 3-Achsen-Beschleunigungssensor und ein 3-Achsen-Gyroskop kombiniert, um Beschleunigung, Winkelgeschwindigkeit und 3-Achsen-Winkel (Roll/Pitch/Yaw) auszugeben. Angetrieben durch den WitMotion-Fusionsalgorithmus (Kalman) bietet es eine XY statische Winkelgenauigkeit von 0,05° (0,1° dynamisch), was es ideal für Neigungs-, Vibrations- und Lagetests in eingebetteten Projekten, Robotik, Automatisierung, Nivellierplattformen und VR/AR-Integrationen macht. Es unterstützt TTL (3,3–5 V) und RS232 (5–36 V) serielle Schnittstellen und funktioniert nahtlos mit Arduino, STM32, C/C++ und MATLAB unter Verwendung des bereitgestellten SDK und der PC-Tools.
Hauptmerkmale
-
6-Achsen-Ausgaben: 3-Achsen-Beschleunigung, 3-Achsen-Winkelgeschwindigkeit sowie 3-Achsen-Winkel.
-
Hohe Genauigkeit: XY statisch 0.05°, dynamisch 0.1°; Beschleunigungsstabilität 0.01 g.
-
Breite Bereiche: Beschleunigung ±16 g; Gyro ±2000 °/s; Winkel X/Z ±180°, Y 90°.
-
Verstellbare Ausgangsrate: 0.2–100 Hz; Baud 9600 / 115200 bps.
-
Duale Schnittstelle: TTL 3.3–5 V oder RS232 5–36 V für einfache MCU/industrielle Integration.
-
WitMotion Fusion Algorithmus: Kalman-Filterung mit Driftkompensation für stabile Haltung.
-
Über Software konfigurierbar: Beschleunigungskalibrierung, Platzierungsorientierung, Bandbreite, Ausgangsrate, Z-Achse auf 0° zurücksetzen.
-
Entwicklerressourcen: Kostenlose Windows-PC-Software (MiniIMU.exe), Treiber (CH340/CP2102), Handbuch &und Datenblatt, SDK für 51-seriell, C/C++, STM32, Arduino, MATLAB, sowie Android-App und Demovideos.
-
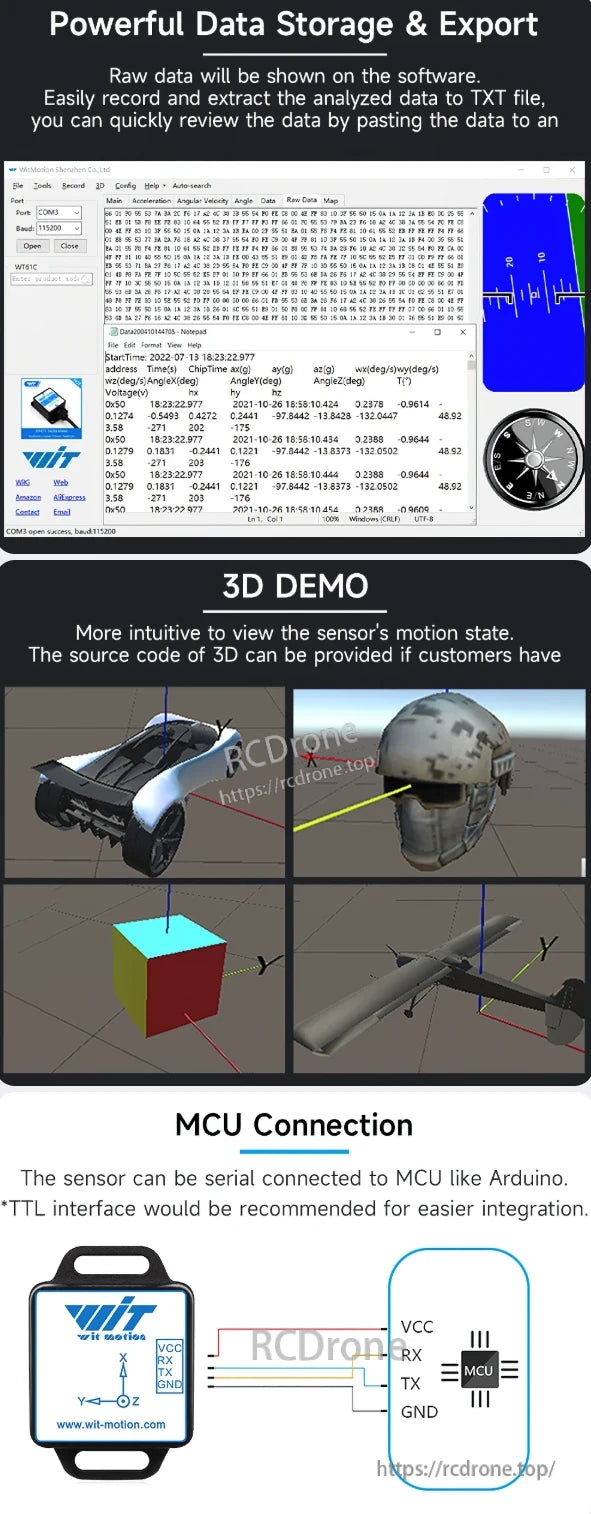
Datenwerkzeuge: Rohdatenansicht, Echtzeitdiagramme, TXT-Export, und eine 3D-Bewegungsdemo (Quellcode auf Anfrage verfügbar).
Technische Spezifikationen
-
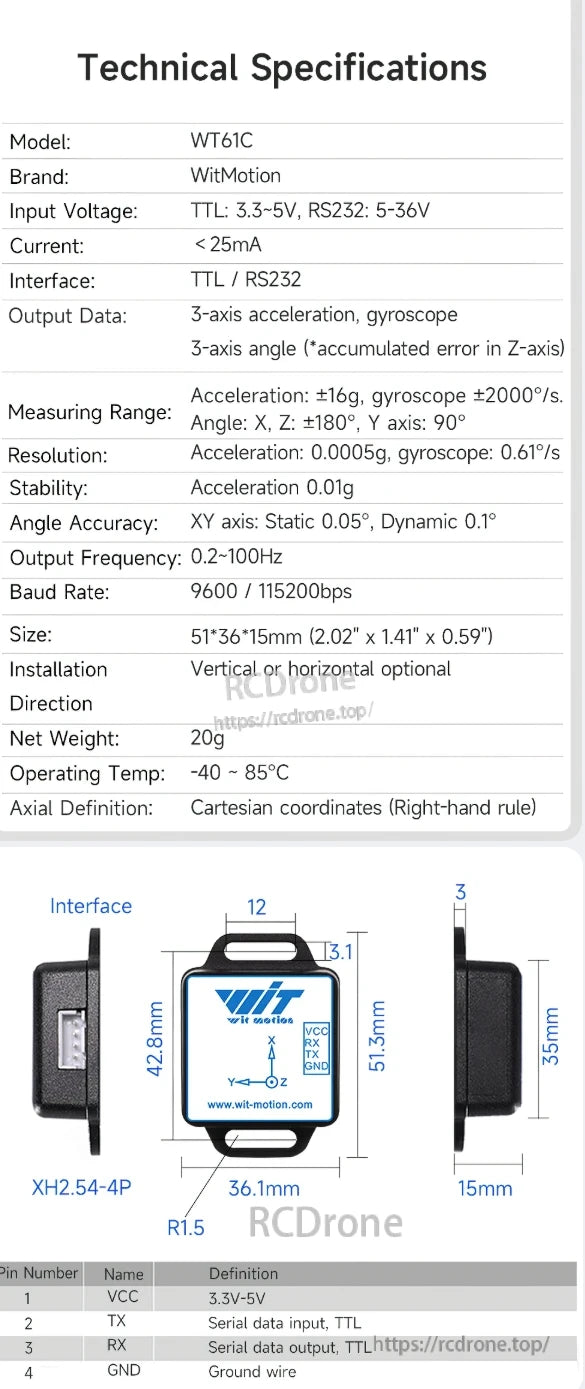
Modell: WT61C
-
Marke: WitMotion
-
Eingangsspannung: TTL: 3.3–5 V; RS232: 5–36 V
-
Strom: < 25 mA
-
Schnittstelle: TTL / RS232
-
Ausgabedaten: 3-Achsen-Beschleunigung, 3-Achsen-Gyroskop, 3-Achsen-Winkel (akkumulierter Fehler in der Z-Achse)
-
Messbereich: Acc ±16 g; Gyro ±2000 °/s; Winkel X/Z ±180°, Y 90°
-
Auflösung: Acc 0.0005 g; Gyro 0.61 °/s
-
Stabilität: Acc 0.01 g
-
Winkelgenauigkeit: XY statisch 0.05°, dynamisch 0.1°
-
Ausgangsfrequenz: 0.2–100 Hz
-
Baudrate: 9600 / 115200 bps
-
Größe: 51 × 36 × 15 mm (≈ 2.02″ × 1.41″ × 0.59″)
-
Installation: Vertikal oder horizontal
-
Netto Gewicht: 20 g
-
Betriebstemperatur: −40 ~ 85 °C
-
Achsen Definition: Kartesische Koordinaten, Rechte-Hand-Regel
Pinbelegung (XH2.54-4P, TTL)
-
VCC — 3.3–5 V
-
TX — Serielle Dateneingabe, TTL
-
RX — Serielle Datenausgabe, TTL
-
GND — Masse
Winkel-Ausgabeprotokoll (Rahmenkopf 0x55 0x53)
| Index | Byte | Bedeutung |
|---|---|---|
| 0 | 0x55 | Kopf |
| 1 | 0x53 | Identifizieren als Winkel Paket |
| 2 | RollL | X-Achsenwinkel niedriges Byte |
| 3 | RollH | X-Achsenwinkel hohes Byte |
| 4 | PitchL | Y-Achsenwinkel niedriges Byte |
| 5 | PitchH | Y-Achsenwinkel hoher Byte |
| 6 | YawL | Z-Achsenwinkel niedriger Byte |
| 7 | YawH | Z-Achsenwinkel hoher Byte |
| 8 | VL | Firmware-Version niedrig |
| 9 | VH | Firmware-Version hoch |
| 10 | Summe | Prüfziffer |
Winkel dekodieren (°):
-
Roll = ((RollH<<8)|RollL) / 32768 * 180 -
Pitch = ((PitchH<<8)|PitchL) / 32768 * 180 -
Yaw = ((YawH<<8)|YawL) / 32768 * 180
Prüfziffer:Summe = 0x55 + 0x53 + RollH + RollL + PitchH + PitchL + YawH + YawL + VH + VL
(Beschleunigungs- und Winkelgeschwindigkeits-Pakete folgen einem ähnlichen Format.)
Software &und Integration
-
Windows-Tools zeigen rohe Frames, analysierte Daten, Live-Diagramme und Neigungsanzeigen; unterstützen Aufzeichnung &und TXT-Export.
-
3D-Demo visualisiert Bewegungen; Quellcode kann bereitgestellt werden.
-
MCU-Verbindung: direkte serielle Verbindung zu Arduino/MCU; TTL wird empfohlen für eine einfachere Integration.
Typische Anwendungen
-
Automatisierung &und Robotik, Neigungswinkelüberwachung, Nivellierungsplattformen, Vibrationsüberwachung, industrielle Tests, IoT-Integration, VR/AR-Headsets.
Details

Kosteneffektives IMU mit 0,05° Genauigkeit in den X- und Y-Achsen. Funktionen zur Neigungs-, Vibrations- und Lageregelung unter Verwendung des WitMotion Fusion Algorithmus. Beinhaltet Beschleunigung, Gyroskop, Winkel, Vibration, Kalman-Filterung und MCU-Funktionen.
Der WitMotion WT61C Sensor bietet 3-Achsen-Beschleunigung und Gyroskop mit einem Bereich von ±16g/±2000°/s, einer Auflösung von 0.0005g, TTL/RS232-Schnittstelle, Baudrate von 9600/115200bps, einem Betriebstemperaturbereich von -40°C bis 85°C und Abmessungen von 51,3×36,1×15mm.
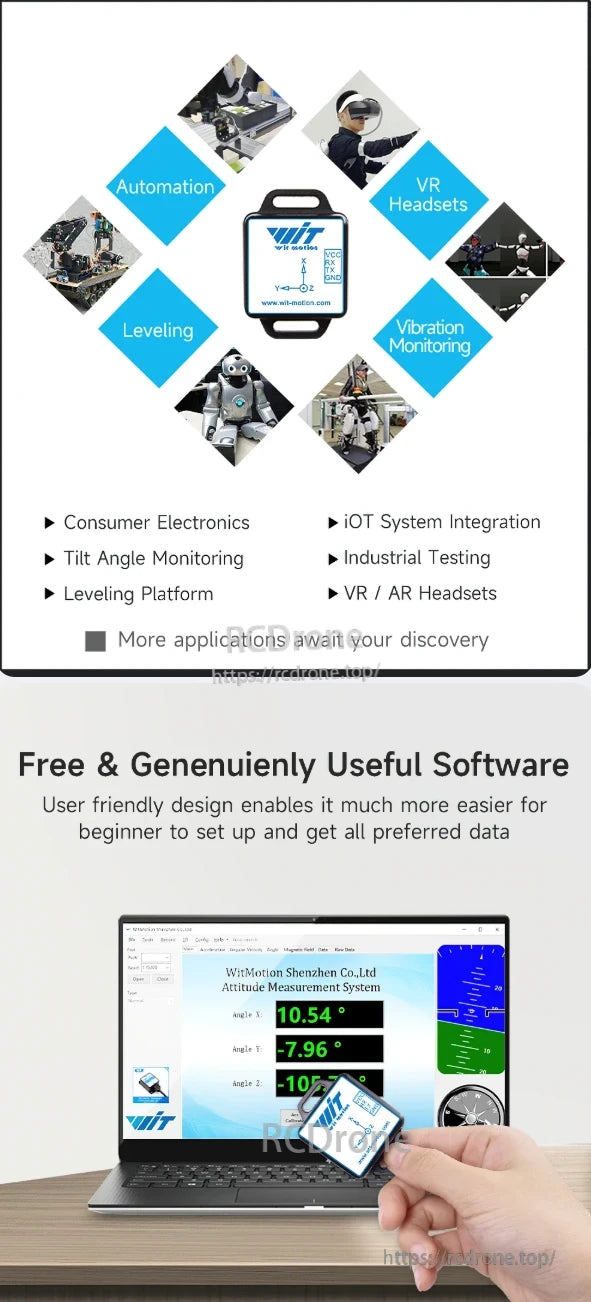
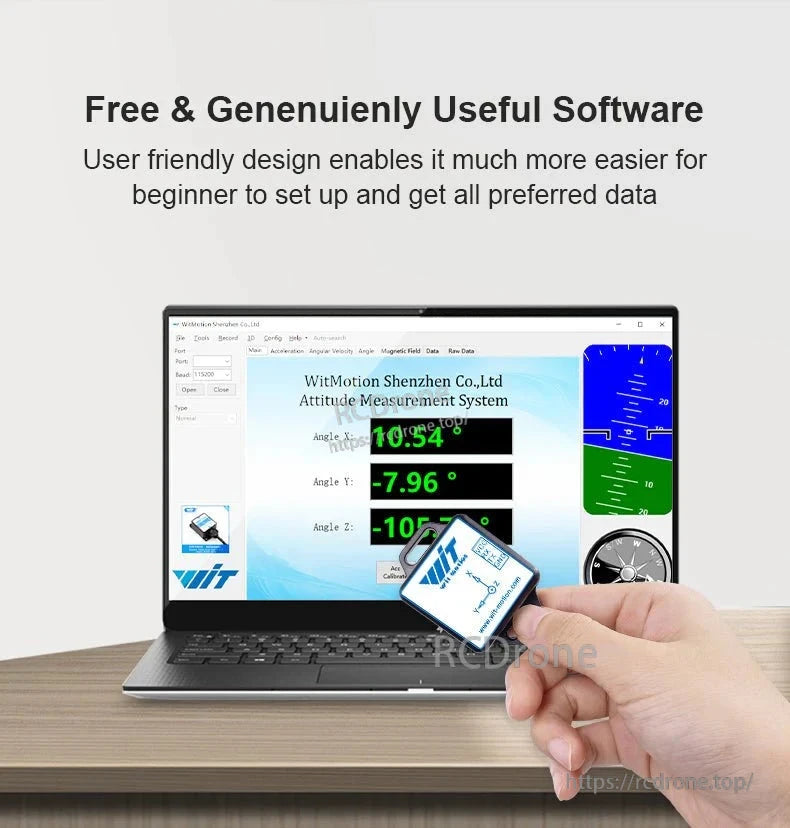
Der WitMotion WT61C Beschleunigungssensor ermöglicht Automatisierung, VR-Headsets, Nivellierung und Vibrationsüberwachung. Verfügt über kostenlose Software für eine einfache Einrichtung, die Echtzeit-Lagedaten mit einer benutzerfreundlichen Oberfläche für Unterhaltungselektronik, IoT, industrielle Tests und weitere Anwendungen anzeigt.
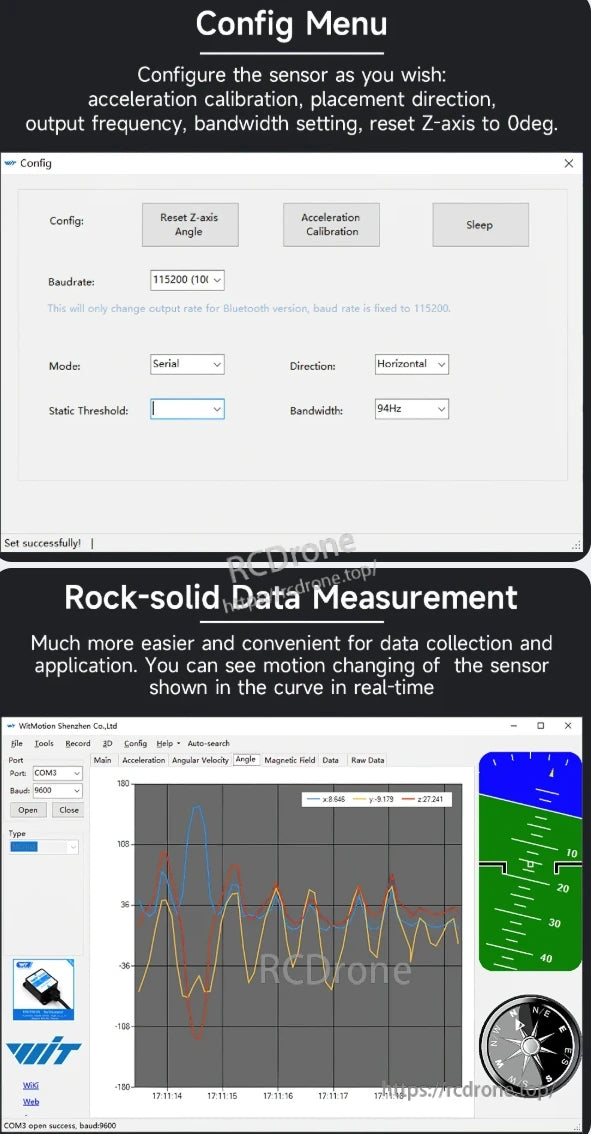
Konfigurierbarer Sensor mit Beschleunigungs-Kalibrierung, Richtungs-Einstellung und Echtzeit-Datenmessung.Die Funktionen umfassen die Z-Achsen-Rücksetzung, Bandbreitenanpassung und die Anzeige des Live-Bewegungskurvenverlaufs für präzise Überwachung und Analyse.
WitMotion WT61C bietet hochgenaue Bewegungserfassung mit Datenexport in TXT-Dateien, 3D-Visualisierung für intuitive Bewegungsanalyse und einfache MCU-Integration über die TTL-Schnittstelle.

Entwicklungskits für WitMotion WT61C umfassen Software, Treiber und Dokumentation für STM32, Arduino, Windows und Matlab. Enthält SDK, Handbücher, Datenblätter, Demovideos und Unterstützung für Android-Apps.
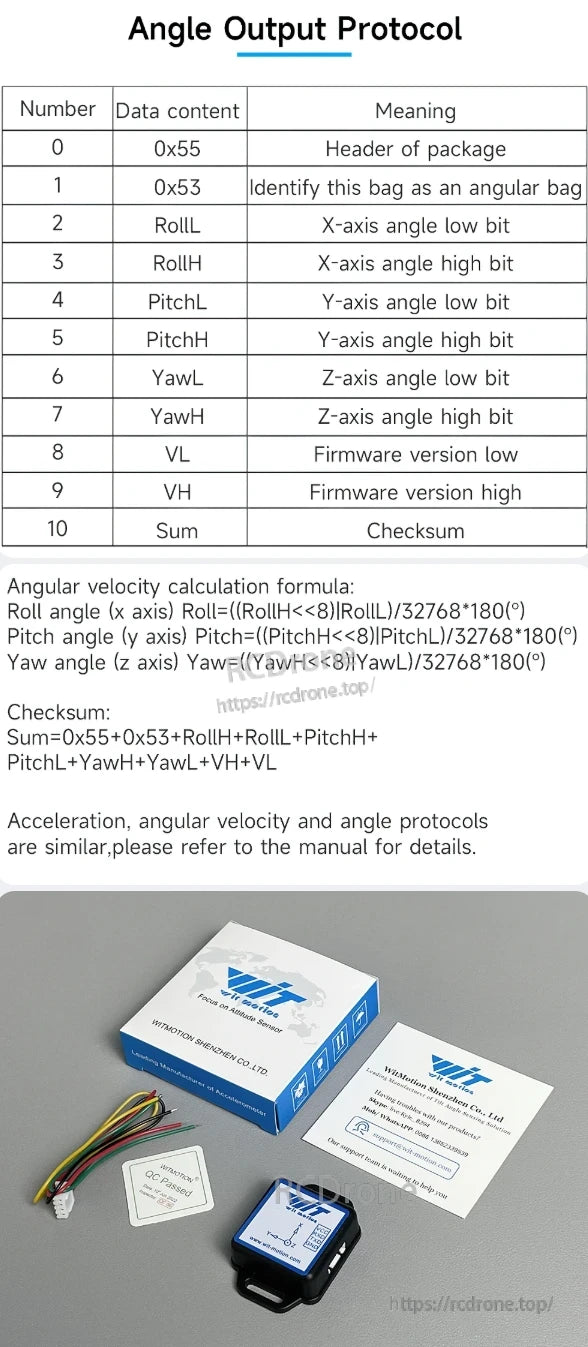
WitMotion WT61C-Sensor bietet ein Winkel-Ausgabeprotokoll mit Roll-, Nick-, Gierwinkel, Firmware-Version und Prüfziffer. Wird mit Berechnungsformeln, Dokumentation, Kabeln und QC-Label geliefert.
Related Collections