WitMotion WT901B AHRS (MPU9250) 10-Achsen IMU mit Barometer & Neigungssensor, ±16g Beschleunigungsmesser, ±2000°/s Gyro, Kalman-Filter, UART/I²C, 0,2–200 Hz Ausgabe
WitMotion WT901B AHRS (MPU9250) 10-Achsen IMU mit Barometer & Neigungssensor, ±16g Beschleunigungsmesser, ±2000°/s Gyro, Kalman-Filter, UART/I²C, 0,2–200 Hz Ausgabe
WitMotion
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
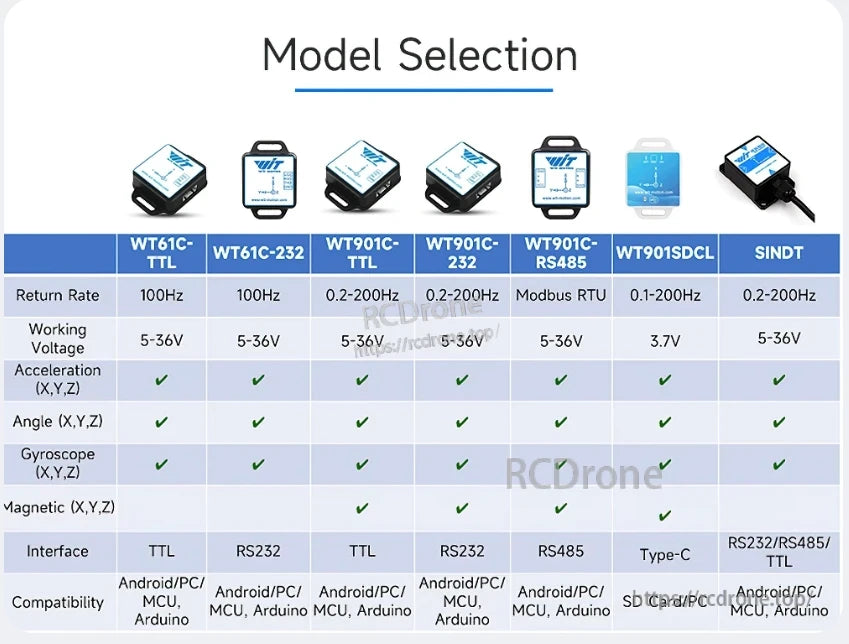
Das WitMotion WT901B AHRS (MPU9250) integriert einen 3-Achsen-Beschleunigungssensor, einen 3-Achsen-Gyroskop, einen 3-Achsen-Magnetometer und ein Barometer, um Winkel, Beschleunigung, Winkelgeschwindigkeit, Magnetfeld, Luftdruck und Höhe bereitzustellen. Ein 48 MHz MCU mit LDO-Regelung und einem hauseigenen Fusions- + Kalman-Filter Algorithmus liefert rauschfreie, stabile Ausgaben für Robotik, strukturelle Überwachung, mobile Maschinen und VR/Verbrauchergeräte.
Hauptmerkmale
-
10-Achsen-IMU + Barometer mit Höhenberechnung (relative Genauigkeit ±0,06 hPa)
-
Winkelgenauigkeit: X/Y 0,05° (statisch), 0,1° (dynamisch); Gier 1° (kalibriert, geringe Störungen)
-
Konfigurierbare Ausgabe 0.2–200 Hz; Start-up ≈ 1000 ms
-
Schnittstellen: UART (4800–230400 bps), I²C (open-drain; benötigt 4,7 kΩ Pull-ups)
-
Versorgung 3,3–5.5 V, typisch 12 mA @5 V, Schlaf 15 µA
-
Robust: −40–85 °C Betrieb, 20.000 g Stoßfestigkeit
-
Kostenlose Windows-Software (Echtzeitkurven, Protokollierung in TXT), visuelle magnetische Kalibrierung, 3D-Demo (Quellcode auf Anfrage verfügbar)
-
Zertifizierungen: Kalibrierungsbericht, RoHS, CE, ISO9001
Roll-/Neigungswinkel-Spezifikationen
| Parameter | Bedingung | Typisch |
|---|---|---|
| Bereich | — | X: ±180°, Y: ±90° |
| Neigung | Statisch / Dynamisch | 0,1° / 0,5° |
| Auflösung | Horizontal | 0,0055° |
| Temperaturdrift | −40–85 °C | ±0.5–1° |
Richtungs (Yaw) Spezifikationen
| Artikel | Zustand | Typisch |
|---|---|---|
| Bereich | — | Z: ±180° |
| Auflösung | Horizontal | 0.0055° |
| Genauigkeit& | 9-Achsen (dynamisch/statisch) | 1° (kalibriert, fern von Störungen) |
| 6-Achsen (statisch) | 0.5° integrale kumulative Fehler |
Sensor Technische Spezifikationen
Beschleunigungsmesser
| Bereich | Auflösung | RMS Rauschen (100 Hz) | Statischer Drift | Temperatur Drift | Bandbreite |
|---|---|---|---|---|---|
| ±16 g | 0.0005 g/LSB | 0,75–1 mg-rms | ±20–40 mg | ±0,15 mg/°C | 5–256 Hz |
Gyroskop
| Bereich | Auflösung | RMS-Rauschen (100 Hz) | Statischer Drift | Temperaturdrift | Bandbreite |
|---|---|---|---|---|---|
| ±2000 °/s | 0,061 (°/s)/LSB | 0,028–0,07 (°/s)-rms | ±0,5–1 °/s | ±0,005–0,015 (°/s)/°C | 5–256 Hz |
Magnetometer & Barometer&
| Magnetometer-Bereich | Magnetometer-Auflösung | Barometer-Bereich | RMS-Rauschen | Relative Genauigkeit |
|---|---|---|---|---|
| ±2 Gauss | 0,0667 mGauss/LSB | 300–1100 hPa | 0.5 Pa-RMS | ±0,06 hPa |
Modul &und Elektrik
| Artikel | Min | Standard | Max |
|---|---|---|---|
| Ausgangsrate | 0,2 Hz | 10 Hz | 200 Hz |
| Eingangsspannung | 3,3 V | 5 V | 5.5 V |
| Betriebsstrom (5 V) | — | 12 mA | — |
| Schlafstrom (5 V) | — | 15 µA | — |
| Betriebstemperatur | −40 °C | — | 85 °C |
| Lagertemperatur | −40 °C | — | 100 °C |
Abmessungen &und Pinbelegung
Größe (mm): A 15.24 × B 15.24 × C 2.54 × D 12.7 × E 2
Achsen: X→rechts, Y→oben, Z→aus der PCB heraus (Rechte-Hand-Regel)
Pins (1–12):
D0, VCC(3.3–5 V), RX(TTL in), TX(TTL out), GND, D1(GPS-Unterstützung), D2(X+ Alarm/Reset), VCC, SCL(Y+ Alarm), SDA(Y− Alarm), GND, D3(X− Alarm)
Konnektivität &und Werkzeuge
-
UART TX↔RX Kreuzverbindung zum MCU
-
I²C mit 4,7 kΩ Pull-ups an SCL/SDA
-
Externes GPS (NMEA-0183) Verkabelung zum Aufbau der GPS-IMU-Navigation (gibt Breite/Länge, Höhe, Kurs, Geschwindigkeit, Verschiebung aus)
Software &und Entwicklungs-Kits
Windows-PC-Suite zur Konfiguration, Kalibrierung (Beschleunigung/Magnetfeld/Winkel/Höhe), Auswahl von Bandbreite/Raten und Roh-/Kurvenprotokollierung. Beispielressourcen für Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#; CH340/CP2102 Treiber; Android-App; Demovideos; Manual.pdf &und Datasheet.pdf.
Anwendungen
IoT-Sensorik, Umwelt &und Brückenüberwachung, Robotik &und Automatisierung, Gabelstapler und mobile Maschinen, Bergbau, Unterhaltungselektronik, VR-Gadgets.
Details

Kosteneffektives AHRS-Barometer bietet hohe Genauigkeit für den Z-Achsenwinkel, Neigung und Luftdruck sowie Beschleunigung, Gyro-Winkel, magnetische Höhe und Luftdruckmessungen.

WitMotion WT901B AHRS IMU umfasst Beschleunigungsmesser, Gyroskop, Magnetometer und Barometer. Bietet ±16g, ±2000°/s, ±2 Gauss, 300-1100hPa. Hohe Auflösung, geringes Rauschen, breite Bandbreite, Temperaturstabilität -40°C bis +85°C.

AHRS IMU WT901B bietet ±180° Roll/Pitch/Yaw, 0.0055° Auflösung, 1° Genauigkeit, 9-Achsen-Algorithmus, UART/IIC, 200Hz-Ausgang, Temperaturbereich -40°C bis 85°C, 3.3V-5.5V Eingang.
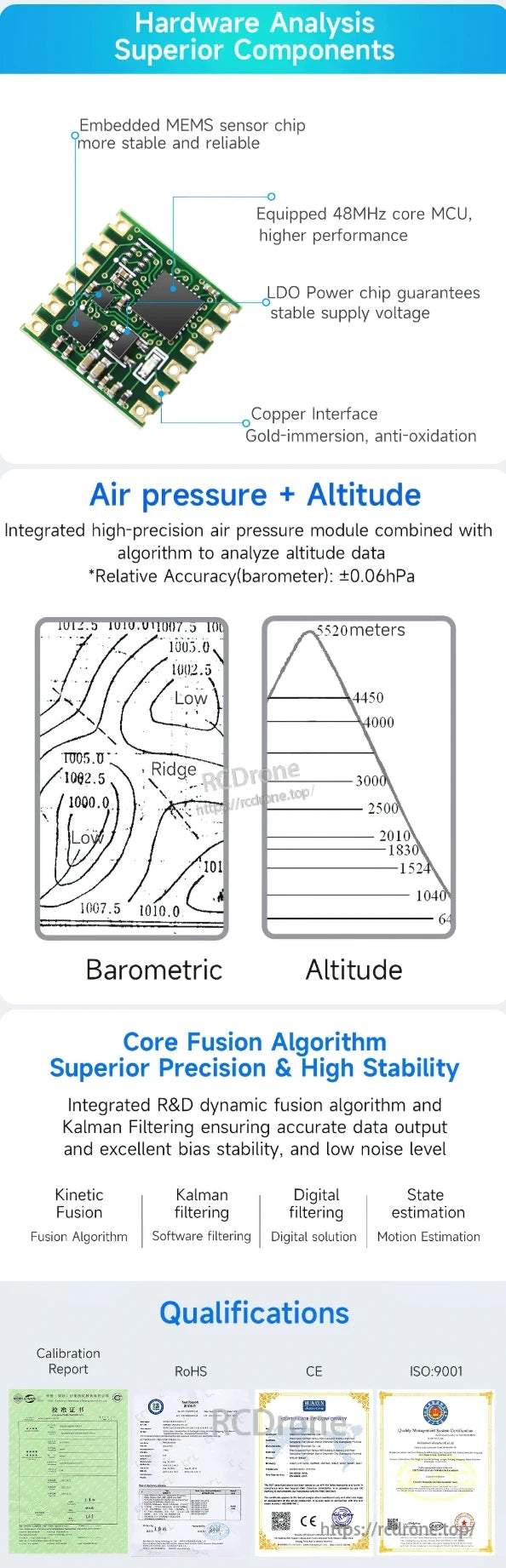
Der WT901B AHRS IMU verfügt über einen MEMS-Sensor, einen 48MHz MCU, einen LDO-Stromchip und eine goldbeschichtete Kupfer-Schnittstelle. Er bietet eine Druckgenauigkeit von ±0,06 hPa, einen stabilen Fusionsalgorithmus und erfüllt die Standards RoHS, CE und ISO:9001.

Der AHRS IMU WT901B verwendet den WitMotion-Algorithmus mit Kalman-Filter für hohe Winkelgenauigkeit. Er ist geeignet für IoT, VR, Robotik, Bergbau, Brücken und Umweltüberwachung.
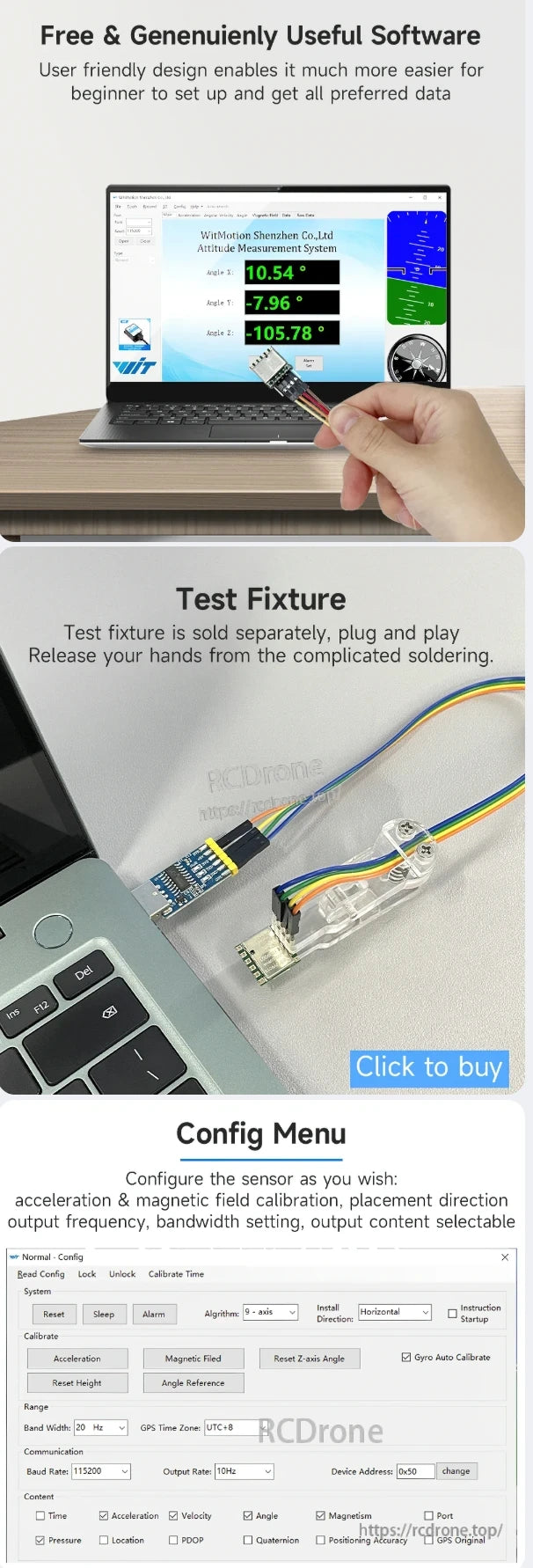
Der AHRS IMU WT901B bietet kostenlose, benutzerfreundliche Software, ein Plug-and-Play-Testgerät und konfigurierbare Einstellungen für Kalibrierung, Ausgabe und präzise Lagebestimmung.
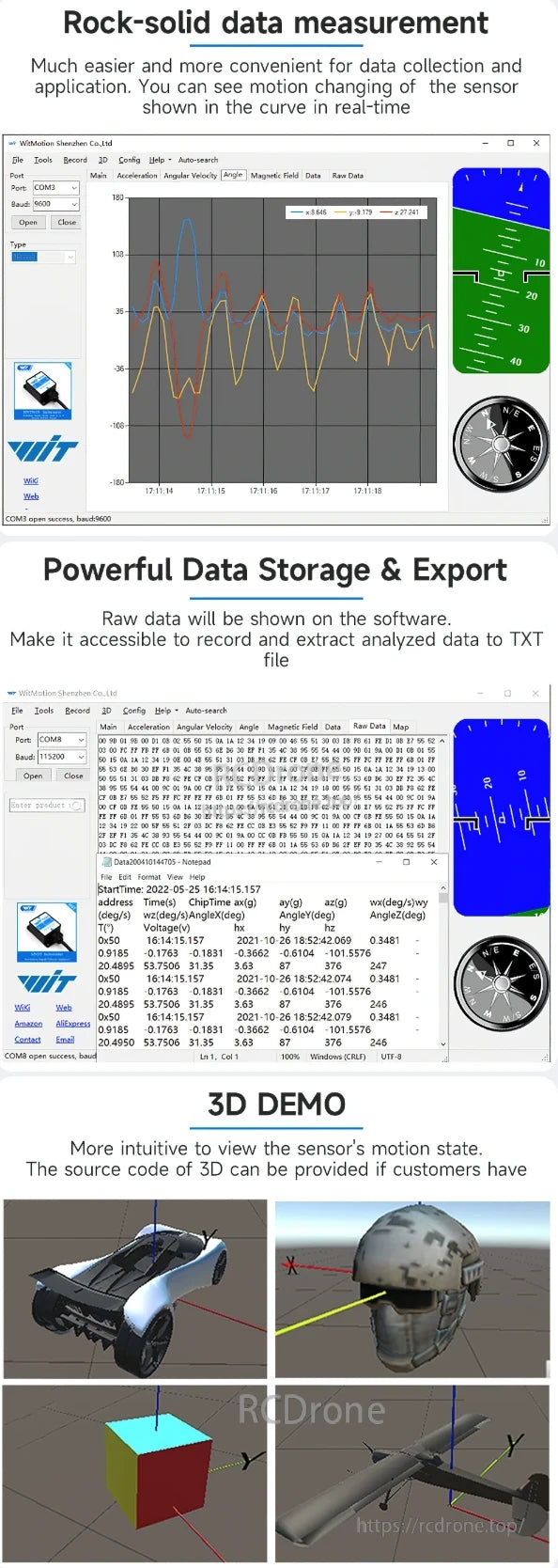
Der WT901B AHRS IMU bietet Echtzeit-Datenmessung, leistungsstarke Speicherung und Export in TXT-Dateien sowie eine intuitive 3D-Bewegungsvisualisierung. Zu den Funktionen gehören Beschleunigung, Winkelgeschwindigkeit, Magnetfelddaten und Kompassanzeige für präzise Sensorüberwachung.

AHRS IMU WT901B bietet visuelle magnetische Kalibrierung, TTL/IIC MCU-Verbindungen, GPS-Kompatibilität. Gibt Breite, Länge, Höhe, Kurs, Geschwindigkeit und Verschiebung für die Navigation aus.
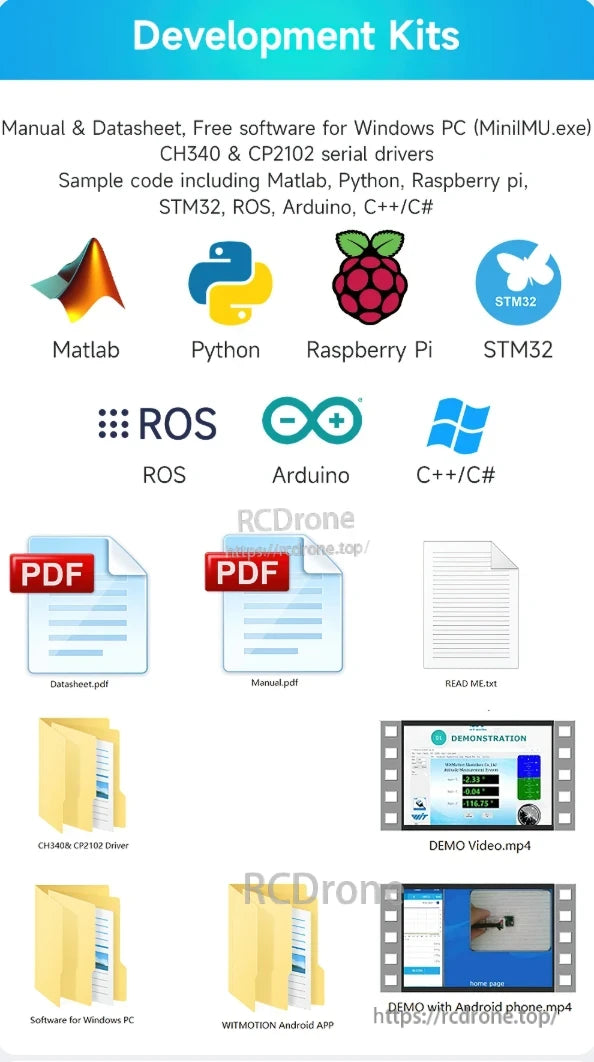
Entwicklungskits enthalten Handbuch, Datenblatt, Windows-Software, CH340 &und CP2102 Treiber, Beispielcode für Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C++/C# und Demovideos für Android und PC.
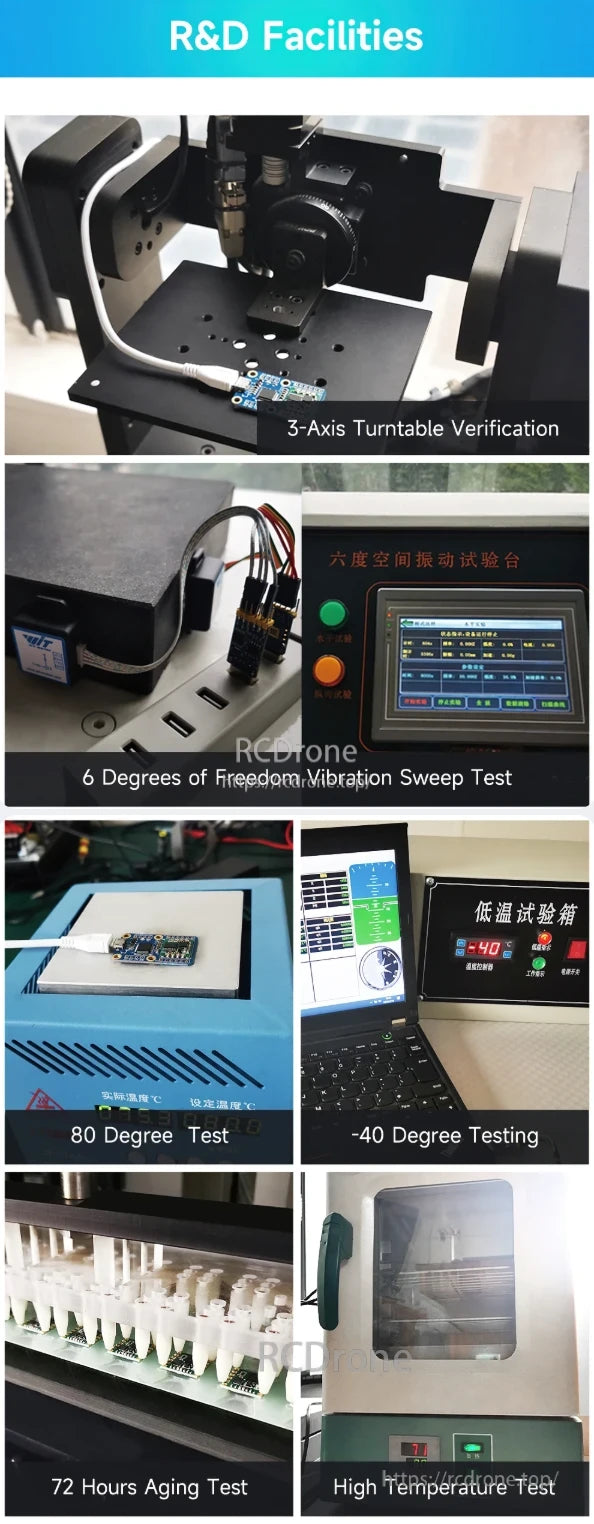
WT901B AHRS IMU unterliegt strengen Tests: 3-Achsen-Drehteller, 6 DOF-Vibration, extreme Temperaturen (80°C bis -40°C), 72-Stunden-Alterung und Hochtemperaturevaluierungen.
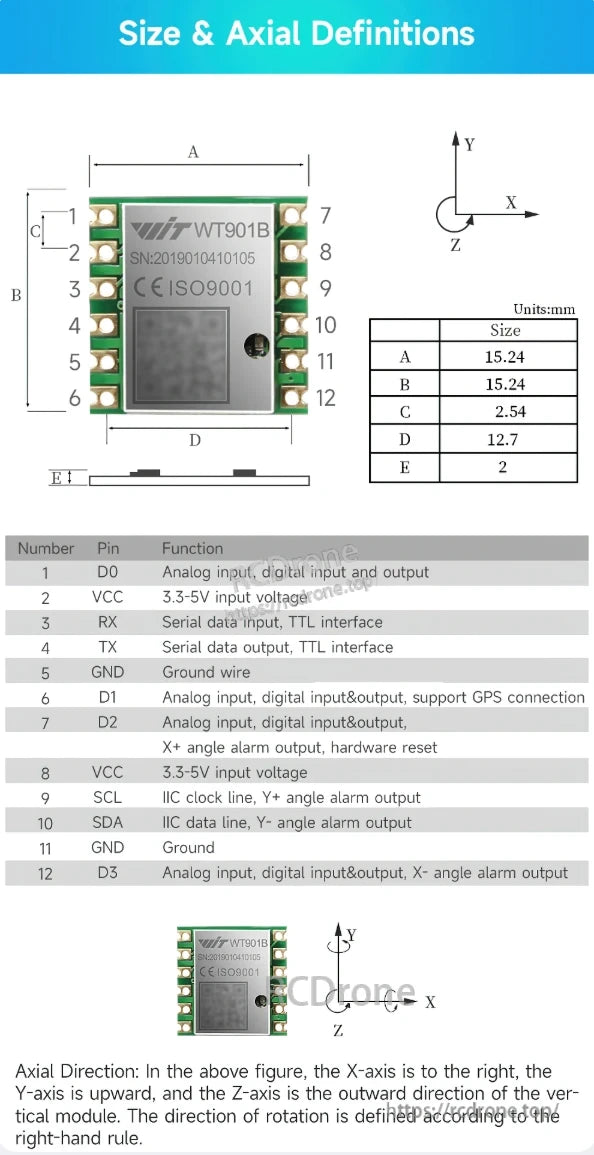
WT901B AHRS IMU Abmessungen: 15,24×15,24×2,54 mm, 12-Pin-Anordnung mit analog/digitalen I/O, UART, I2C und Alarmausgängen. Axiale Richtungen werden durch die Rechte-Hand-Regel definiert; X nach rechts, Y nach oben, Z nach außen.

AHRS IMU WT901B von WITMotion umfasst das Sensormodul, einen Katalog, eine Promo-Karte mit QR-Codes für Dokumente und Unterstützung.
Related Collections