












WitMotion WT901C-485 9-Achsen IMU Beschleunigungsmesser Gyroskop Digitaler Kompass (RS485/RS232/TTL), 0,05° Winkelgenauigkeit, 0,2–200 Hz AHRS
WitMotion WT901C-485 9-Achsen IMU Beschleunigungsmesser Gyroskop Digitaler Kompass (RS485/RS232/TTL), 0,05° Winkelgenauigkeit, 0,2–200 Hz AHRS
RCDrone
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Der WitMotion WT901C-485 ist ein kompakter 9-Achsen AHRS IMU, der auf einem triaxialen MPU9250-Klasse Sensor-Set (Beschleunigungsmesser + Gyroskop + Magnetometer) und dem Fusion/Kalman-Algorithmus von WitMotion basiert. Er liefert Winkel, Beschleunigung, Winkelgeschwindigkeit, Magnetfeld und Quaternion Ausgaben mit XY-Statische Genauigkeit 0,05° (dynamisch 0,1°) und 0,2–200 Hz einstellbare Aktualisierungsrate. Mehrere physikalische Schnittstellen (RS485/RS232 Modbus & TTL UART) und breite Eingangsbereiche machen den WT901C-485 einfach in Arduino/STM32/MCUs, PCs und industrielle Steuerungen zu integrieren. Offizielle Windows-Software (MiniIMU.exe) bietet Echtzeitgrafiken, 3D-Demos, Datenprotokollierung/-export und visuelle magnetische Kalibrierung.
Hauptmerkmale
-
9-Achsen-Ausgaben: Winkel (Roll/Pitch/Yaw), 3-Achsen Acc/Gyro/Mag, Quaternion.
-
Hohe Stabilität &und Genauigkeit: XY 0,05° statisch, 0,1° dynamisch; Beschleunigungsstabilität 0,01 g.
-
Flexible I/O: TTL / RS232 / RS485 (Modbus); Baud 4.800–230.400 (Standard 9.600).
-
Verstellbare Rate: 0,2–200 Hz (Standard 10 Hz).
-
Breite Versorgung: TTL 3,3–5 V, RS232/RS485 5–36 V; <25 mA typisch.
-
Werkzeuge &und SDKs: Windows-App, Android-App, CH340/CP2102 Treiber, Beispielcode für C/C++/STM32/Arduino/Matlab.
-
Magnetische Kalibrierung &und 3D-Demo für die Erstkonfiguration; Live-Diagramme und TXT-Export.
-
Industriedesign: –40~85 °C, 51×36×15 mm, vertikale oder horizontale Montage.
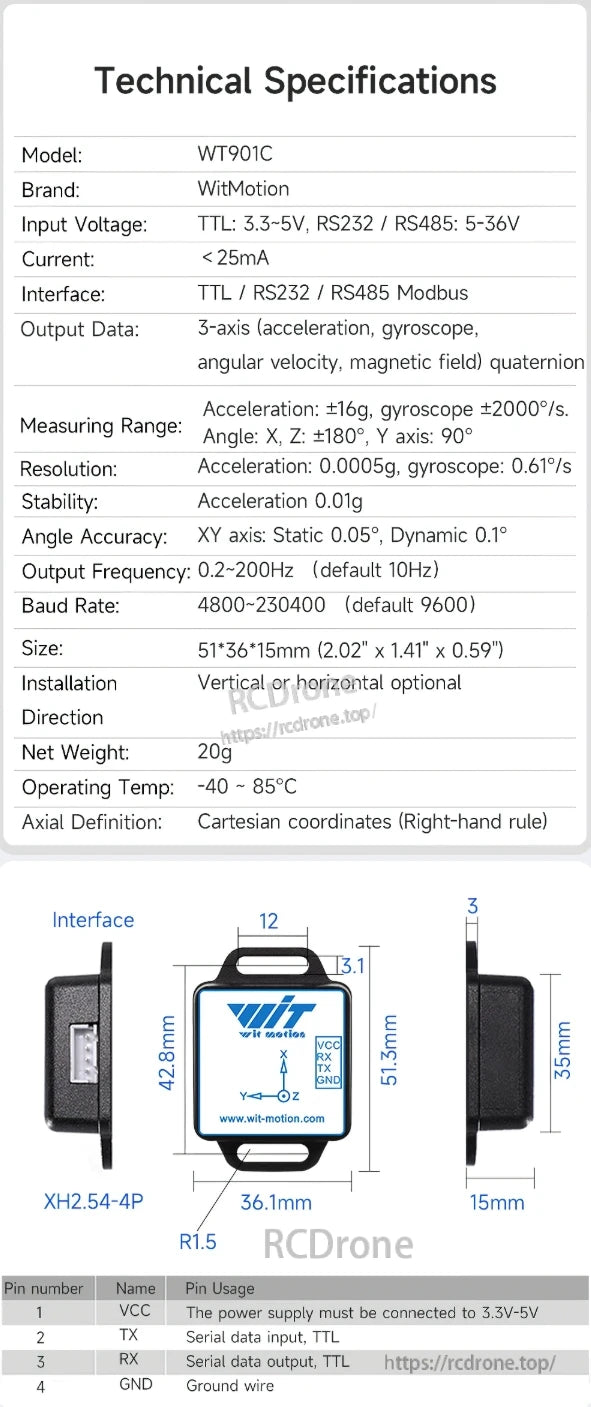
Technische Spezifikationen
| Artikel | Spezi. |
|---|---|
| Modell | WT901C (WT901C-485 Variante) |
| Schnittstellen | TTL / RS232 / RS485 (Modbus) |
| Eingangsspannung | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| Strom | < 25 mA |
| Ausgabedaten | Beschleunigung, Winkelgeschwindigkeit, Magnetfeld, Winkel, Quaternion |
| Messbereiche | Acc ±16 g, Gyro ±2000 °/s; Winkel: X,Z ±180°, Y 90° |
| Auflösung | Acc 0.0005 g, Gyro 0.61 °/s |
| Stabilität | Beschleunigung 0.01 g |
| Winkelgenauigkeit | XY statisch 0.05°, dynamisch 0.1° |
| Ausgangsfrequenz | 0.2–200 Hz (Standard 10 Hz) |
| Baudrate | 4.800–230.400 (Standard 9.600) |
| Größe / Gewicht | 51×36×15 mm, 20 g |
| Betriebstemperatur | –40 ~ 85 °C |
| Achsen | Kartesisch, Rechte-Hand-Regel |
| Installation | Vertikal oder horizontal |
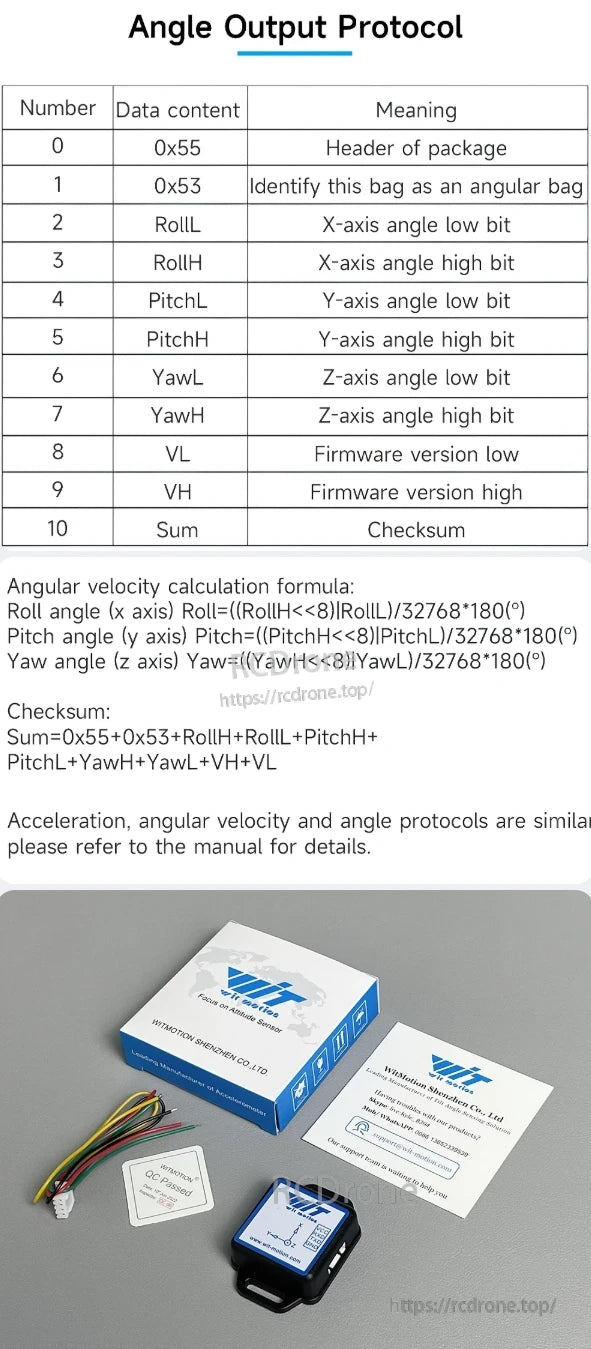
Winkelrahmen (0x55 0x53) – Ausgabeschnittstelle
| Byte-Index | Inhalt | Bedeutung |
|---|---|---|
| 0 | 0x55 | Paketkopf |
| 1 | 0x53 | „Winkel“ Rahmen-ID |
| 2–3 | RollL/RollH | X-Achsenwinkel (niedrig/hoc |
| 4–5 | PitchL/PitchH | Y-Achsenwinkel (niedrig/hoc |
| 6–7 | YawL/YawH | Z-Achsenwinkel (niedrig/hoc |
| 8 | VL | Firmware-Version niedrig |
| 9 | VH | Firmware-Version hoch |
| 10 | Summe | Prüfziffer |
Winkeldecodierung
Roll (°) = ((RollH << 8) | RollL) / 32768 × 180
Pitch (°) = ((PitchH << 8) | PitchL) / 32768 × 180
Yaw (°) = ((YawH << 8) | YawL) / 32768 × 180
Prüfziffer
Summe = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(Die Beschleunigungs- und Winkelgeschwindigkeitsrahmen folgen dem gleichen Layout-Stil—siehe Handbuch.)
Abmessungen &und Anschluss
Gehäusegröße: 51 × 36 × 15 mm (H × B × T), mit Montageschrauben; Gewicht ≈ 20 g.
Anschluss: XH2.54-4P (Platine Header auf dem Sensor).
Pinbelegung (TTL-Version)
| Pin | Name | Beschreibung |
|---|---|---|
| 1 | VCC | Stromversorgungseingang 3.3–5 V |
| 2 | TX | Serielle Dateneingabe, TTL-Niveau |
| 3 | RX | Serielle Datenausgabe, TTL-Niveau |
| 4 | GND | Erde |
Hinweise: Verwenden Sie TTL-Niveaus für die direkte MCU-Integration. RS232/RS485-Varianten verwenden ihre jeweiligen Spannungsniveaus und Verdrahtungsstandards.
Software &und Werkzeuge
-
MiniIMU.exe (Windows): Konfiguration (Algorithmus, Installationsrichtung, Bereiche, Bandbreite), Echtzeitgrafiken, Roh-/Hexansicht, Datenaufzeichnung und TXT-Export.
-
3D-Demo: Visualisierung der Orientierung in Echtzeit (Quellcode verfügbar).
-
Visuelle magnetische Kalibrierung: Ellipsen-Anpassungsassistent zur Beseitigung von Verzerrungen (empfohlen für die erste Verwendung).
-
Treiber &und Code: CH340/CP2102 Treiber; Beispiele für STM32, Arduino, C/C++, Matlab; Android-App; PC/Telefon-Demovideos.
Typische Anwendungen
Automatisierung und Robotik, Nivellierungsplattformen, Neigungswinkelüberwachung, Vibrationsüberwachung, Unterhaltungselektronik, IoT-Systemintegration, industrielle Tests, VR/AR-Headsets.
Details

Kosteneffektives AHRS IMU mit 0,05° Genauigkeit in den X- und Y-Achsen. Bietet Neigungs-, Vibrations- und Lageregelung unter Verwendung des WitMotion-Fusionsalgorithmus. Beinhaltet Beschleunigung, Gyroskop, Winkel, Magnetfeld, Kalman-Filterung und Quaternion-Funktionen.
Der WitMotion WT901C IMU-Sensor bietet 3-Achsen-Beschleunigung, Gyroskop, Winkelgeschwindigkeit und Magnetfeldmessung. Er unterstützt TTL/RS232/RS485-Schnittstellen, hat einen Beschleunigungsbereich von ±16g, ein Gyroskop von ±2000°/s, eine statische Winkelgenauigkeit von 0,05° und arbeitet bei Temperaturen zwischen -40°C und 85°C.

Der WitMotion WT901C IMU-Sensor bietet Automatisierung, VR-Headsets, Nivellierung und Vibrationsüberwachung. Anwendungen umfassen Unterhaltungselektronik, IoT-Integration, industrielle Tests und AR/VR. Die kostenlose Software bietet eine benutzerfreundliche Haltungsmessung mit Echtzeit-Winkeldaten.
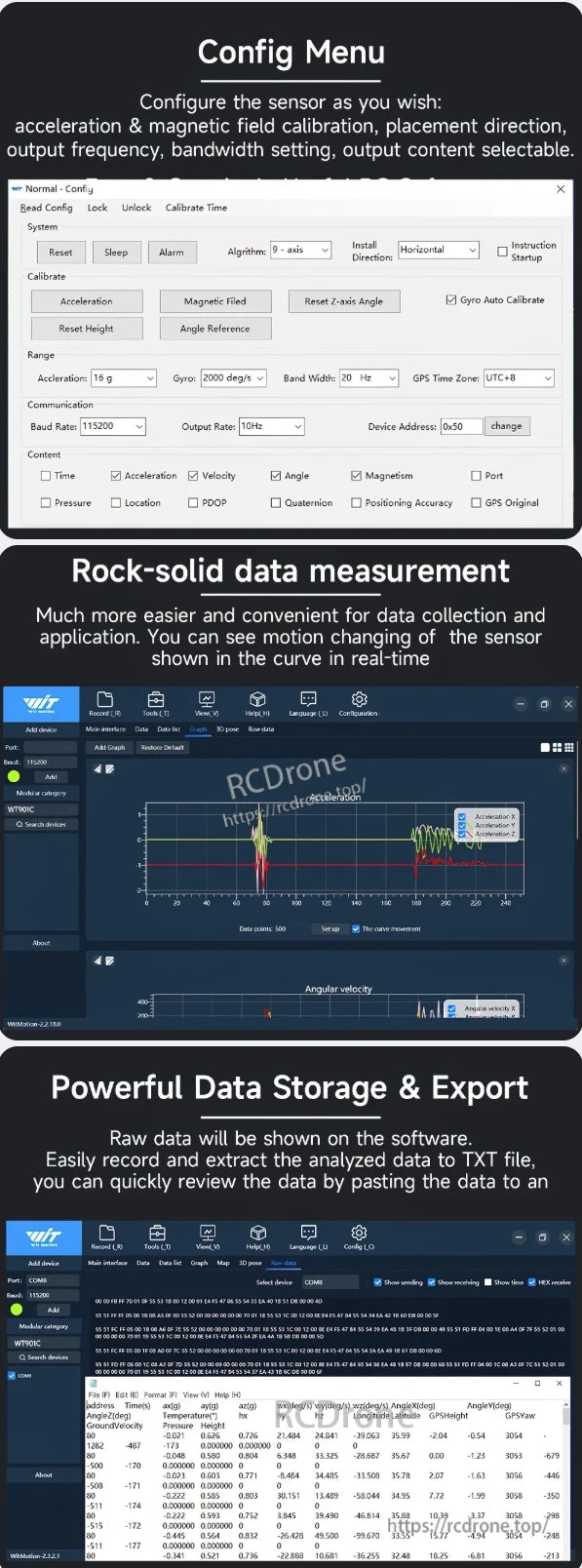
Der WitMotion WT901C IMU-Sensor bietet konfigurierbare Einstellungen für Beschleunigung, Magnetfeld und Orientierung. Er ermöglicht die Visualisierung von Echtzeitdaten, robuste Messungen und unterstützt die Datenspeicherung/-export im TXT-Format zur Analyse.
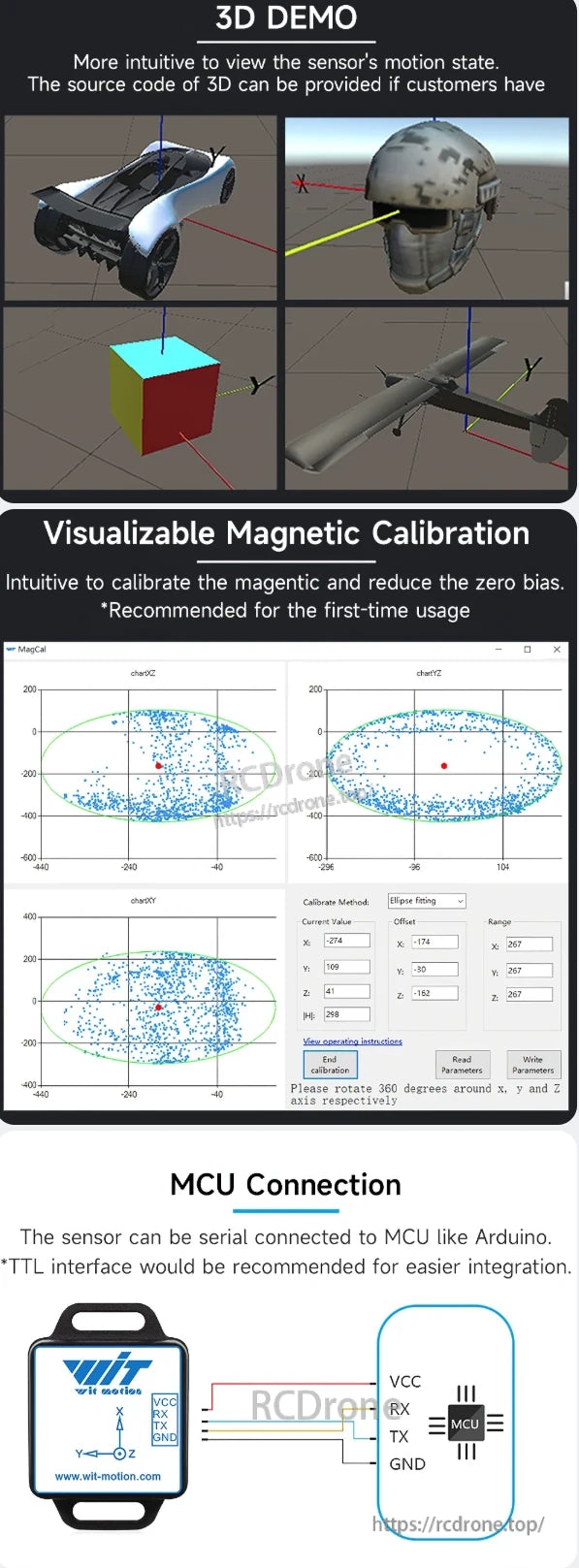
3D-Demo visualisiert die Sensorbewegung mit Auto-, Helm-, Würfel- und Drohnenmodellen. Die magnetische Kalibrierungsoberfläche ermöglicht eine intuitive Anpassung. Die MCU-Verbindungsdetails verfügen über eine TTL-Schnittstelle für Arduino, mit beschrifteten VCC-, RX-, TX- und GND-Pins.

Entwicklungskits enthalten kostenlose Windows-Software, Treiber, Handbücher und Beispielcodes für STM32, Arduino, C++, MATLAB. Enthält PDFs, Demovideos und Unterstützung für Android-Apps für den WT901C IMU-Sensor.
IMU-Sensor WT901C Winkel-Ausgabeprotokolldetails: Datenstruktur, Winkelberechnungen, Prüfziffernformel, Verpackung. Enthält Roll-, Nick-, Gierwinkel, Firmware-Version und Prüfziffer.
Related Collections












