









WitMotion WT901C 9-Achsen AHRS IMU — Beschleunigungsmesser, Gyroskop, Magnetometer mit Winkel & Quaternion, 0,05° Genauigkeit, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion WT901C 9-Achsen AHRS IMU — Beschleunigungsmesser, Gyroskop, Magnetometer mit Winkel & Quaternion, 0,05° Genauigkeit, 0,2–200 Hz, TTL/RS232/RS485 Modbus
WitMotion
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Das WitMotion WT901C ist ein kompaktes 9-Achsen AHRS IMU, das einen 3-Achsen-Beschleunigungssensor, 3-Achsen-Gyroskop und 3-Achsen-Magnetometer mit WitMotion’s Fusion/Kalman-Filterung kombiniert, um Winkel (Roll/Pitch/Gier), Winkelgeschwindigkeit, Beschleunigung, Magnetfeld und Quaternion auszugeben. Es bietet eine 0,05° statische XY-Genauigkeit (0,1° dynamisch), unterstützt 0,2–200 Hz Aktualisierungsraten und kommuniziert über TTL, RS232 oder RS485 (Modbus)—ideal für Neigungs-, Vibrations- und Lagemaßungen in der Automatisierung, Nivellierungsplattformen, VR/AR und industriellen Tests.
Hauptmerkmale
-
Hohe Genauigkeit AHRS: Statische XY 0,05°, dynamisch 0,1°; rechtshändige kartesische Achsen.
-
Breite I/O &und Spannung: TTL 3.3–5 V, RS232/RS485 5–36 V, Baud 4 800–230 400 (Standard 9 600).
-
Konfigurierbarer Ausgang: 0,2–200 Hz (Standard 10 Hz); benutzerwählbare Inhalte.
-
Vollständige 9-Achsen-Daten: Beschleunigung, Winkelgeschwindigkeit, Magnetfeld, Winkel &und Quaternion.
-
Visualisierungstools: Windows MiniIMU-Software mit Echtzeitgrafiken, Rohdatenprotokollierung/-export (TXT), 3D-Bewegungsdemo und visuelle magnetische Kalibrierung.
-
Entwicklerressourcen: Treiber (CH340/CP2102), Handbücher/Datenblatt, Beispielcode für 51/C++/STM32/Arduino/Matlab und Android-App.
-
Flexible Installation: Vertikale oder horizontale Montage; kompakt 51 × 36 × 15 mm, ~20 g.
html
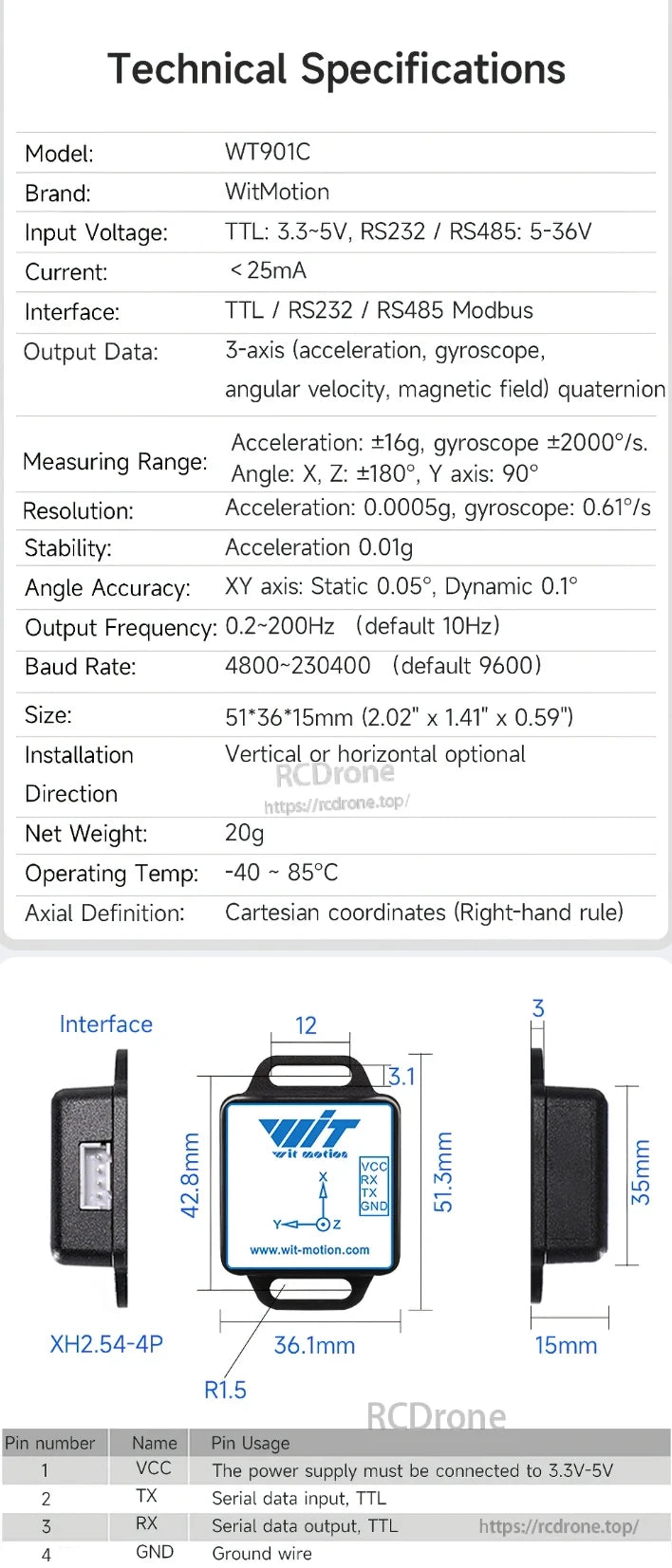
Technische Spezifikationen
-
Modell/Marke: WT901C / WitMotion
-
Schnittstellen: TTL / RS232 / RS485 (Modbus)
-
Eingangsspannung: TTL: 3.3–5 V; RS232/RS485: 5–36 V
-
Strom: < 25 mA
-
Ausgabedaten: 3-Achsen Beschleunigung, Gyroskop (Winkelgeschwindigkeit), Magnetfeld, Winkel, Quaternion
-
Messbereich: Acc ±16 g; Gyro ±2000 °/s; Winkel X,Z ±180°, Y 90°
-
Auflösung: Acc 0.0005 g; Gyro 0.61 °/s
-
Stabilität: Acc 0. 01 g
-
Winkelgenauigkeit: XY statisch 0,05°, dynamisch 0,1°
-
Ausgangsfrequenz: 0,2–200 Hz (Standard 10 Hz)
-
Baudrate: 4 800–230 400 (Standard 9 600)
-
Größe / Gewicht: 51 × 36 × 15 mm / ≈ 20 g
-
Betriebstemperatur: −40 ~ 85 °C
-
Achsendefinition: kartesische Koordinaten, Rechte-Hand-Regel
Abmessungen &und Anschluss (TTL-Version)
-
Gehäuse: 51,3 mm (H) × 36,1 mm (B) × 15 mm (T); Montageschraubenradius R1.5
-
Anschluss: XH2.54-4P
-
Pinbelegung (von links nach rechts auf dem Etikett VCC/RX/TX/GND):
-
VCC — Stromversorgung 3,3–5 V
-
TX — Serielle Dateneingabe, TTL
-
RX — Serielle Datenausgabe, TTL
-
GND — Masse
-
Hinweis: Die Achsengrafik ist auf dem Gehäuse aufgedruckt (X↑, Y→, Z•), was die Ausrichtung erleichtert.
Winkel-Ausgabeprotokoll (Rahmen 0x55 0x53)
| Byte | Inhalt | Bedeutung |
|---|---|---|
| 0 | 0x55 | Kopfzeile |
| 1 | 0x53 | Winkelrahmen-ID |
| 2–3 | RollL/RollH | X-Achsen-Winkel |
| 4–5 | PitchL/PitchH | Y-Achsen-Winkel |
| 6–7 | YawL/YawH | Z-Achsen-Winkel |
| 8–9 | VL/VH | Firmware-Version (niedrig/hoch) |
| 10 | Summe | Prüfziffer |
Winkelumrechnung:Roll = ((RollH<<8)|RollL)/32768*180°Pitch = ((PitchH<<8)|PitchL)/32768*180°Yaw = ((YawH<<8)|YawL)/32768*180°
(Beschleunigungs- und Winkelgeschwindigkeitsrahmen sind ähnlich; siehe Handbuch.)
Software &und Werkzeuge
-
Windows (MiniIMU.exe): Gerätekonfiguration (Bereiche, Bandbreite, Ausgabefrequenz), Echtzeitgrafiken, Rohdatenansicht, 3D-Pose Visualisierung, Export nach TXT.
-
Magnetkalibrierung: visueller Ellipsen-Anpassungs-Workflow zur Reduzierung von Verzerrungen (Drehung um X/Y/Z).
-
MCU-Integration: direkte serielle Verbindung; TTL empfohlen für einfache MCU-Anschlüsse (Arduino/STM32 usw.).
-
Inklusive Ressourcen: Datasheet.pdf, CH340 &und CP2102 Treiber, Beispielcode, Android-App, Demovideos.
Typische Anwendungen
Automatisierung | Neigungs-/Nivellierungsüberwachung | Vibrationsüberwachung | Nivellierungsplattformen | IoT-Systemintegration | Industrietests | VR/AR-Headsets | Unterhaltungselektronik.
Details

Kosteneffektives AHRS IMU mit einer Genauigkeit von 0,05° in den X- und Y-Achsen. Verfügt über Neigungs-, Vibrations- und Lageregelungssensorik unter Verwendung des WitMotion Fusion Algorithmus. Enthält Beschleunigung, Gyroskop, Winkel, Magnetfeld, Kalman-Filterung und Quaternion-Funktionen.
WitMotion WT901C IMU bietet 3-Achsen-Sensorik mit Beschleunigung, Gyroskop und Magnetometer. Bietet Quaternion-Ausgabe. Unterstützt TTL, RS232, RS485. Misst ±16g, ±2000°/s, ±180° Winkel. Kompakte Größe von 51×36×15mm. Betriebstemperatur von -40 bis 85°C.

WitMotion WT901C IMU unterstützt Automatisierung, VR-Headsets, Nivellierung und Vibrationsüberwachung. Es eignet sich für Unterhaltungselektronik, IoT, industrielle Tests und AR/VR. Wird mit kostenloser Software zur Anzeige von Echtzeit-Winkeldaten geliefert.

Das WitMotion WT901C IMU-Konfigurationsmenü ermöglicht die Kalibrierung des Sensors, die Einstellungen für die Datenausgabe und die Echtzeitvisualisierung der Bewegung. Es unterstützt einen 9-Achsen-Algorithmus, einstellbare Beschleunigung, Gyroskop, Bandbreite und GPS-Zeitzone. Echtzeitgrafiken zeigen Beschleunigung und Winkelgeschwindigkeit für präzise Messungen.
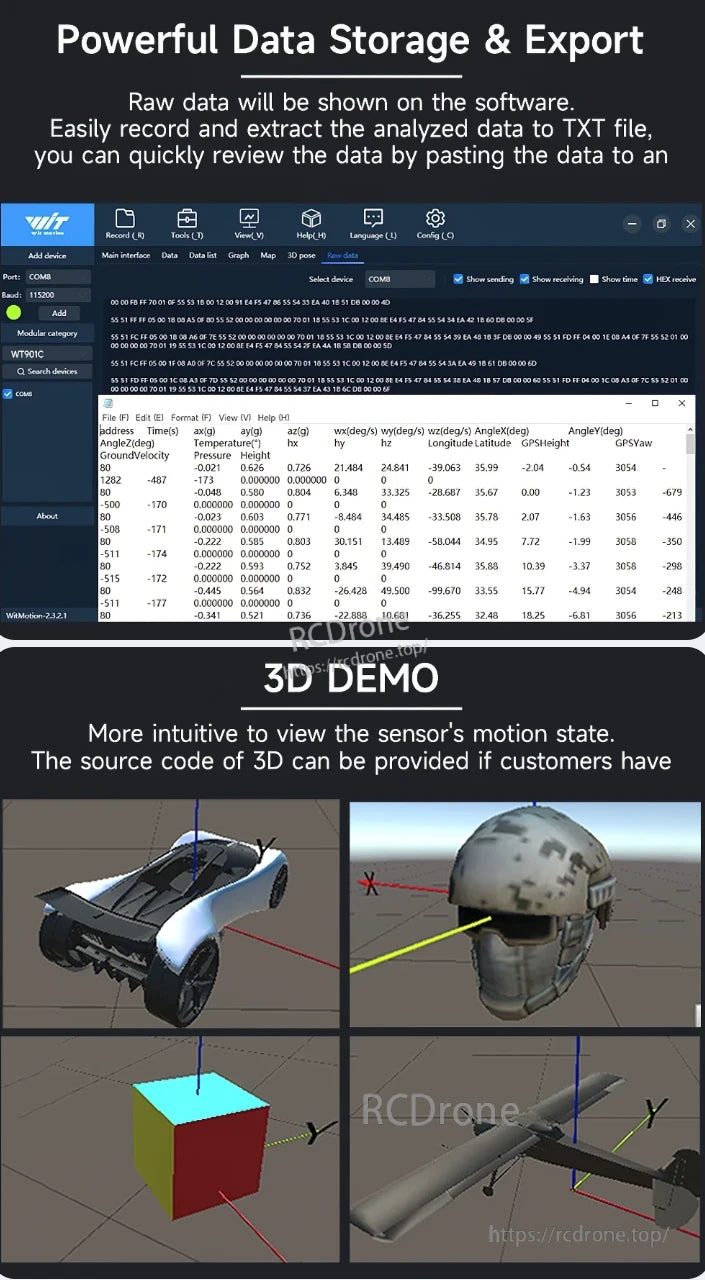
Das WitMotion WT901C IMU bietet leistungsstarke Datenspeicherung, einfachen TXT-Export und 3D-Bewegungsvisualisierung mit verfügbarer Quellcode.
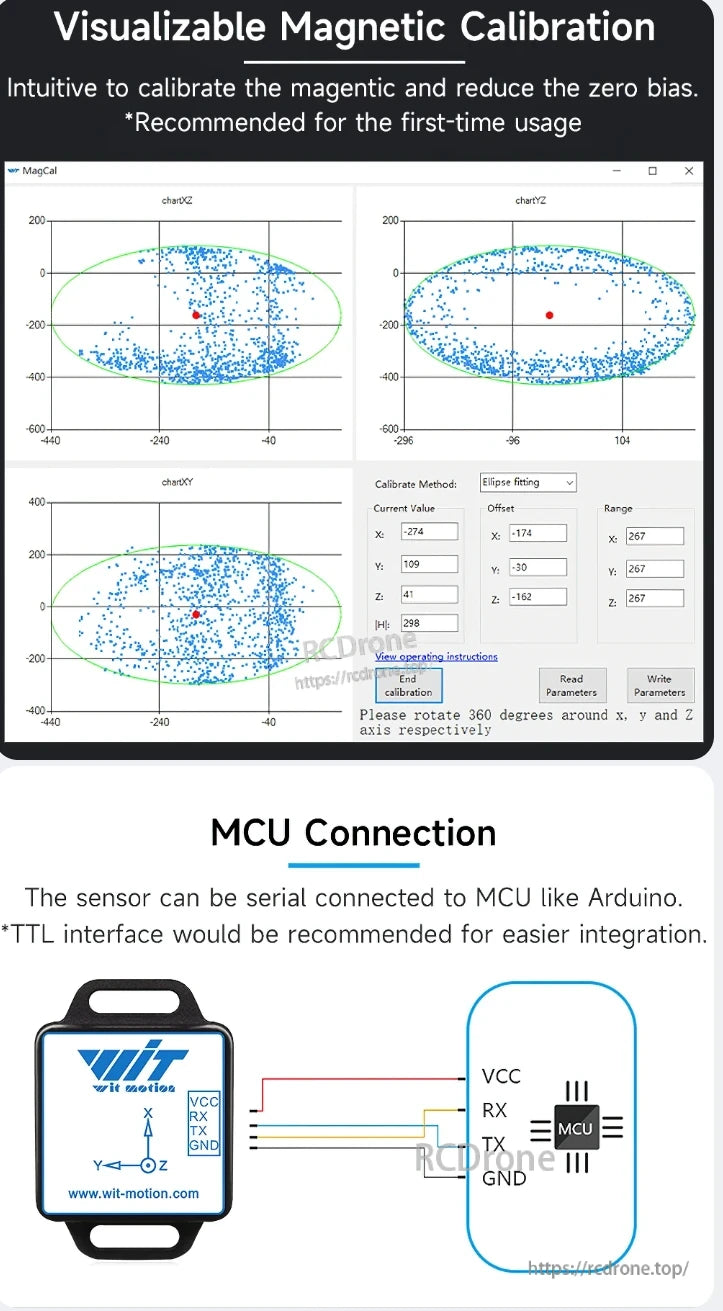
Visualisierbare magnetische Kalibrierung für das WT901C IMU mit der Ellipsenanpassungsmethode. Die Verbindung zum MCU erfolgt über die TTL-Schnittstelle. Der Sensor wird über die Pins VCC, RX, TX, GND mit Arduino-ähnlichen MCUs verbunden.
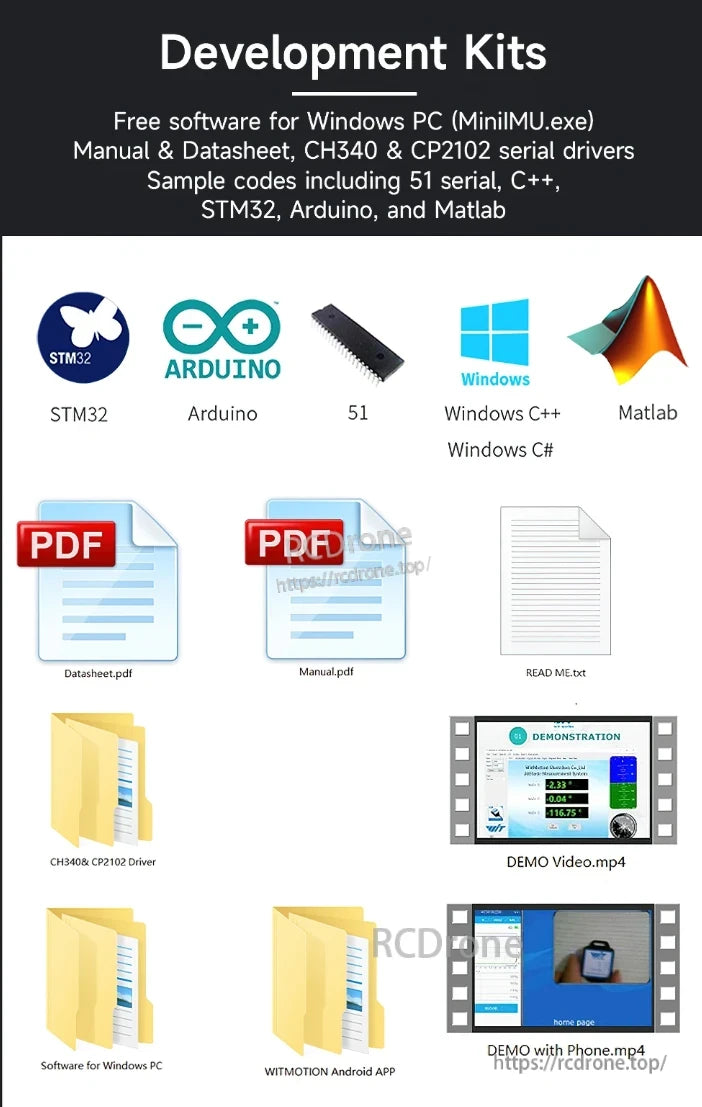
Entwicklungskits enthalten kostenlose Software für Windows, Handbuch, Datenblatt, CH340 &und CP2102 Treiber, Beispielcodes für 51, C++, STM32, Arduino und Matlab sowie Demovideos und eine Android-App.
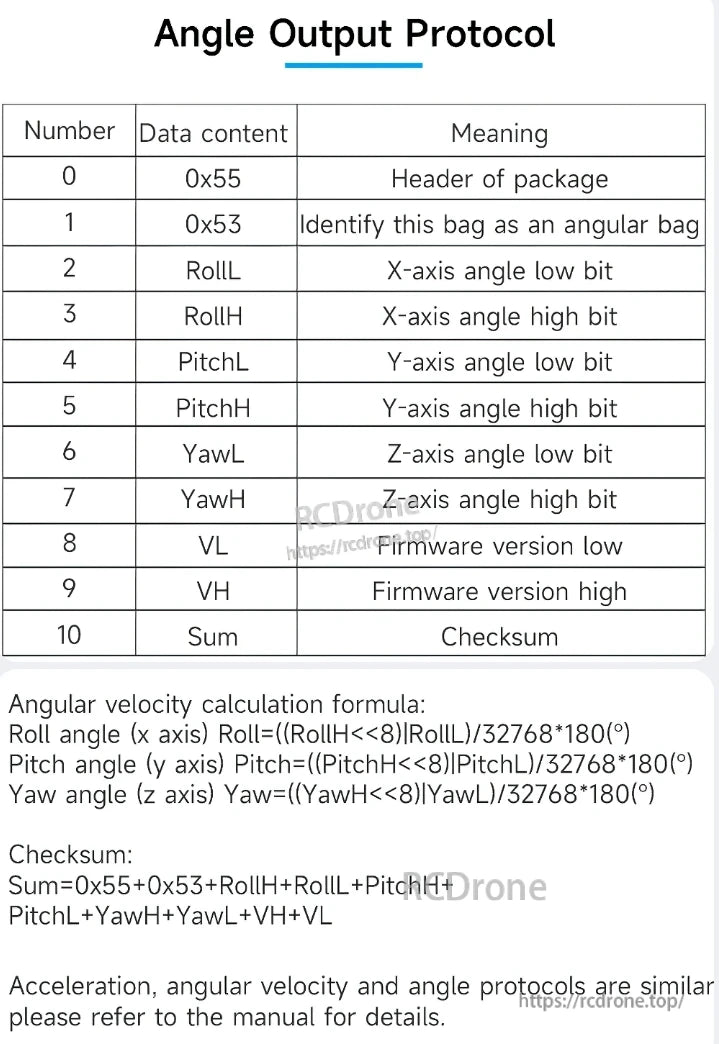
Die Datenstruktur für den WT901C IMU-Winkeloutput umfasst Header, Roll, Pitch, Yaw, Firmware-Version und Prüfziffer. Formeln für Berechnungen und Überprüfungen sind enthalten. Ähnliche Strukturen existieren für Beschleunigung und Winkelgeschwindigkeit.
Related Collections









