





WitMotion WTGAHRS3 6-Achsen GPS-IMU AHRS/INS Beschleunigungsmesser Gyrosensor, RS485/TTL, Beidou+GPS, IP67, Kalman-Filter
WitMotion WTGAHRS3 6-Achsen GPS-IMU AHRS/INS Beschleunigungsmesser Gyrosensor, RS485/TTL, Beidou+GPS, IP67, Kalman-Filter
WitMotion
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
WTGAHRS3 ist ein professioneller Inertialnavigations-Haltungssensor, der ein 6-Achsen-IMU mit hochpräziser Satellitenpositionierung kombiniert. Er integriert einen Beschleunigungsmesser, ein Gyroskop und einen Haltungslöser mit Kalman-Filterung für stabile, hochpräzise Winkelausgaben und (bei GPS-Versionen) meldet er Breiten-/Längengrad und Boden Geschwindigkeit. Das Gehäuse besteht aus Aluminium mit IP67 Staub-/Wasserschutz, einer externen Antennen-Schnittstelle und einem geschirmten Kabel für robuste Signalintegrität. PC-Software und Beispielcode (Windows C/C#, STM32, 51, MATLAB) werden für eine schnelle Integration bereitgestellt.
Kernleistung
-
Haltungsgenauigkeit: statisch 0,05°, dynamisch 0.1° (Serienspezifikation)
-
IMU-Bereich: Beschleunigung ±16 g; Gyroskop ±500 °/s; Winkelbereich ±180°
-
Ausgaben: Zeit, Beschleunigung, Winkelgeschwindigkeit, Euler-Winkel; GPS-Versionen fügen hinzu Breitengrad, Längengrad, Boden Geschwindigkeit
-
Filter/Algorithmen: digitale Filterung, Kalman-Filter, kinetische/Zustandsabschätzung
-
Navigations: integriertes GPS + BeiDou (BDS) mit optionalem Empfang mehrerer Konstellationen und hochpräziser inertialer Navigation in Innenräumen (IMU-Fusion)
-
Gehäuse: Aluminium, IP67; externer Antennenanschluss; geschirmtes Mantelkabel
Modellreihe &und Dateninterfaces
-
WTGAHRS3-TTL/232 — Seriell TTL/RS-232 Niveau, hochfrequente IMU + Kursfusion; genauer Kurs auch ohne GPS.
-
WTGAHRS3-485 — RS485 industrielle Schnittstelle, MODBUS Protokoll; integriert IMU-Daten für reine inertiale Positionierung.
-
WTGAHRS3-GPS — Fügt Multi-Konstellation GNSS (BDS/GPS/GLONASS/Galileo/QZSS/SBAS) für Breiten-/Längengrad und Boden-Geschwindigkeitsausgabe hinzu.
Spezifikationen
Allgemeine IMU-Spezifikationen (gilt für alle Modelle)
| Artikel | Spezi. |
|---|---|
| Gemessene Achsen | 3-Achsen Beschleunigung, 3-Achsen Gyroskop, Winkel |
| Messbereich | Beschleunigung ±16 g; Gyroskop ±500 °/s; Winkel ±180° |
| Winkelgenauigkeit | XY: 0.2°, Z: 0.5° |
| Ausgabewerte | Zeit, Beschleunigung, Gyroskop, Euler-Winkel (GPS-Modelle geben auch Breitengrad/Längengrad und Boden Geschwindigkeit) |
| Gewicht | 83.76 g |
| Kabellänge | 1 m |
WTGAHRS3-TTL/232 Parameter
| Artikel | Speziifikation |
|---|---|
| Schnittstelle | Serieller Port (TTL/232 Niveau) |
| Baudrate | 4.800 ~ 921.600 bps |
WTGAHRS3-485 Parameter
| Artikel | Speziifikation |
|---|---|
| Versorgungsspannung | 5–36 V |
| Strom | < 50 mA |
| Baudrate | 115.200 bps (konfigurierbar 4.800 ~ 460.800) |
| Aktualisierungsrate | 1 Hz |
| Betriebstemperatur | −30 ~ +85 °C |
| Dateninterface | RS485 |
| Protokoll | MODBUS |
WTGAHRS3-GPS (GNSS) Parameter
| Artikel | Speziifikation |
|---|---|
| Konstellationen | BDS/GPS/GLONASS/GALILEO/QZSS/SBAS |
| RF-Kanäle | 3-Kanal RF, unterstützt den Empfang aller Konstellationen |
| TTFF (kalt/heiß/wiedererfassen) | ≤32 s / ≤1 s / ≤1 s |
| Empfindlichkeit | Kalt −148 dBm; Heiß −156 dBm; Wiedererfassung −160 dBm; Tracking −162 dBm |
| Positionsgenauigkeit | < 2.5 m (CEP50) |
| Geschwindigkeitsgenauigkeit | < 0,1 m/s (1σ) |
| Positionsaktualisierung | 1/2/5/10 Hz (Standard 1 Hz) |
| Protokoll | NMEA 0183 |
| Maximale Höhe / Geschwindigkeit | 18.000 m / 515 m/s |
| Typischer GNSS-Stromverbrauch | < 29 mA @ 3.3 V |
| Betriebs-/Lagertemperatur | −40 ~ +85 °C / −45 ~ +125 °C |
Mechanisch &und Anschluss
| Artikel | Speziifikation |
|---|---|
| Abmessungen | ~40 mm × 34 mm Gehäuse |
| Montage | Bohrungsdurchmesser 3 mm, Bohrungsabstand 32 mm |
| Frontplattenbreite | 26 mm (Referenz) |
| Beschriftete Pins | VCC / RXD / TXD / GND |
| Antenne | Externer Antennen Anschluss (GNSS-Modelle) |
| Gehäuse | Aluminium, IP67, staub-/wasser-/stoßfest |
| Kabel | Abgeschirmtes Mantelkabel (Anti-Interferenz) |
Software &und Entwicklung
-
Windows-PC-Software: Dashboard, Datenaufzeichnung, Kurvendisplay, 3D-Modellanzeige, Konfiguration.
-
Ressourcen: Benutzerhandbuch, Serielle Schnittstellentreiber, PC-Software, Beispielprogramme für STM32, 51, Windows C/C#, MATLAB.
Typische Anwendungen
-
Mobile Roboter, AGVs/AMRs, industrielle Fahrzeuge, marine Plattformen
-
UAVs, Gimbals, Antennensteuerung, Kartierungswagen
-
Untergrund-/Innen Inertial Navigation (RS485/TTL) und Außen GNSS-unterstützte Navigation (GPS-Modell)
Details
Sechs-Achsen-Inertialnavigationssensor mit GPS und Beidou, ausgestattet mit Beschleunigungs-, Gyroskop-, Winkel-, Längen-, Dimensions- und Bodengeschwindigkeitsmessung.

Hohe Präzision und Stabilität mit Kalman-Filterung, digitaler Filterung und Zustandsabschätzung. Unterstützt China Beidou und U.S. GPS für genaue Positionierung, Längengrad, Breitengrad und Boden-Geschwindigkeitsmessung.
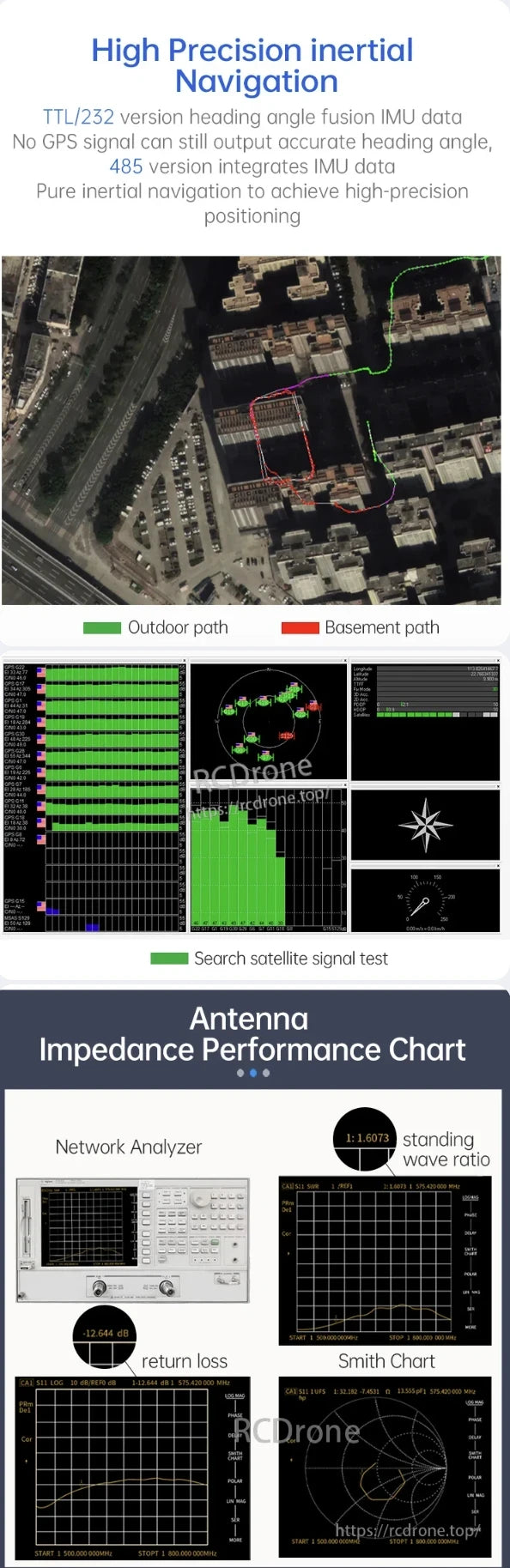
Hochpräzise inertiale Navigation mit IMU-Datenfusion, die eine genaue Ausrichtung ohne GPS ermöglicht. Bietet Antennenimpedanzleistung, Ergebnisse des Netzwerk-Analyzers, Rückflussdämpfung, Stehwellenverhältnis und Smith-Diagramm für Signalintegrität.
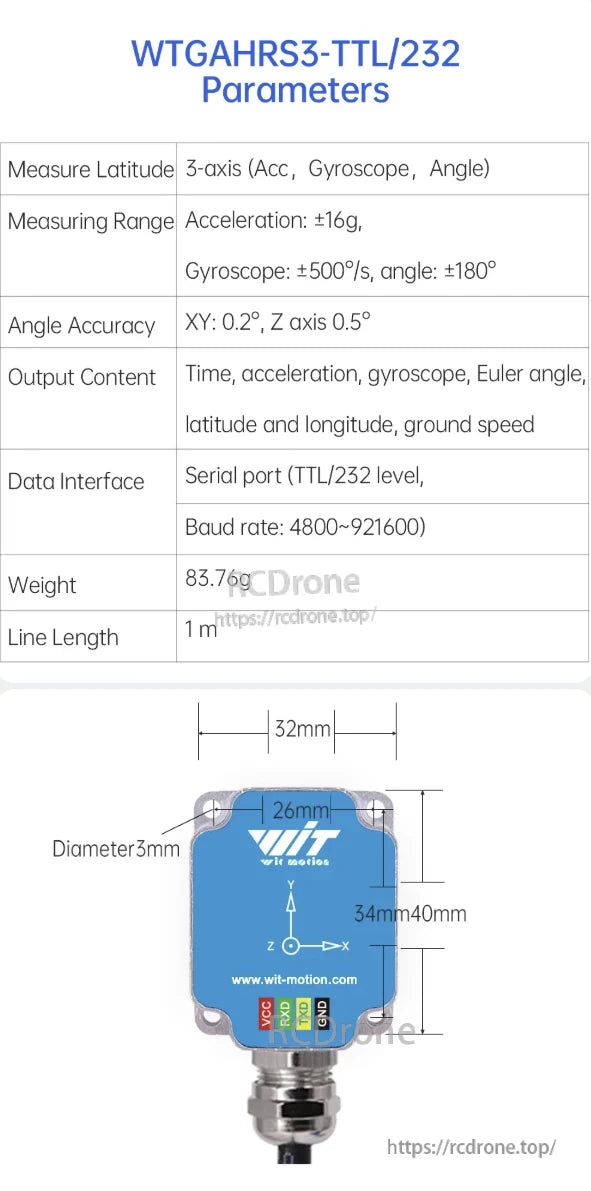
WitMotion WTGAHRS3-TTL/232 AHRS-Sensor bietet eine 3-Achsen-Messung mit ±16g Beschleunigung, ±500°/s Gyroskop, ±180° Winkelbereich. Bietet Zeit, Beschleunigung, Gyroskop, Euler-Winkel, Breitengrad, Längengrad, Boden-Geschwindigkeit über TTL/232. Wiegt 83,76g, Abmessungen 40×34×26mm, 1m Kabellänge.

Die WitMotion WTGAHRS3-485 und WTGAHRS3-GPS Sensoren bieten eine breite Spannungsversorgung, einen niedrigen Stromverbrauch und eine hochpräzise GPS/BD-Positionierung. Sie unterstützen mehrere Satellitensysteme, eine schnelle TTFF und die Protokolle RS485/MODBUS/NMEA0183 für eine zuverlässige Leistung bei extremen Temperaturen.

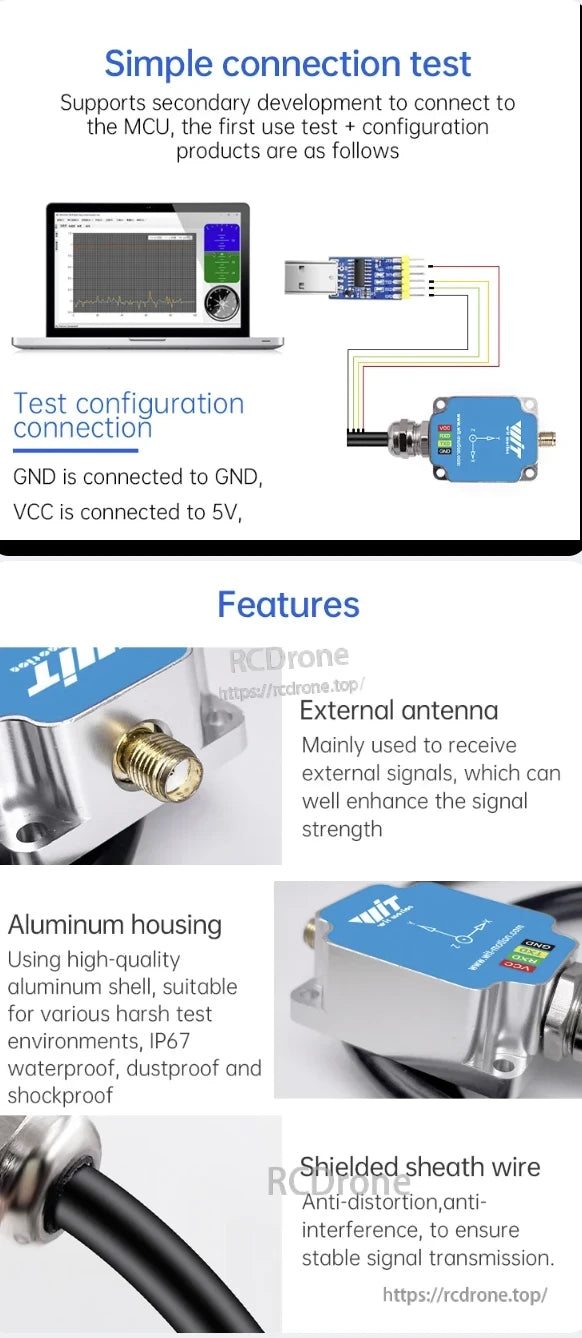
Der WitMotion WTGAHRS3 AHRS Sensor verfügt über eine externe Antenne, ein Aluminiumgehäuse mit IP67-Schutz, geschirmte Kabel und unterstützt die MCU-Verbindung für einfache Tests.
Related Collections





