








WitMotion WTRTK-M ZED-F9P RTK GNSS GPS Modul, zentimetergenaue Differenzialpositionierung für UAV/Auto, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS Modul, zentimetergenaue Differenzialpositionierung für UAV/Auto, GPS/GLONASS/Galileo/BeiDou, UART TTL, NMEA/UBX/RTCM
WitMotion
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
WTRTK-M ist ein hochpräzises RTK-Differentialpositionierungsmodul, das auf dem u-blox ZED-F9P GNSS-Motor basiert. Es verfolgt GPS, GLONASS, Galileo, BeiDou und QZSS gleichzeitig und liefert Zentimeter-genaue Genauigkeit nach RTK-Korrektur. Das Modul bietet doppelte Frequenz Empfang, 5 Hz Echtzeitausgabe für Mapping-/autonome Anwendungen und ein PC-Tool für die Ein-Klick-Konfiguration von mobilen/Basisstationen und Routenvisualisierung. Anti-Interferenz- und Kalibrierungstechnologien verbessern die Datenstabilität und -sicherheit.
Hauptmerkmale
-
Zentimeter-genaues RTK: mobile/Basis-Workflow mit schneller Konvergenz.
-
Multi-Konstellation, doppelte Frequenz: GPS L1/L2; GLONASS G1/G2; BeiDou B1/B2; Galileo E1/E5b; QZSS L1/L2.
-
Hohe Empfindlichkeit &und schneller Start: 184 Kanäle; Kaltstart 24 s, Warmstart 2 s, Rückgewinnung 2 s; Konvergenz ≤10 s.
-
Zeit-/Richtungsleistung: 1PPS RMS 30 ns (99% 60 ns); Richtungsgenauigkeit 0,4° (dynamisch 0,3°).
-
Reiche Protokolle: NMEA, UBX, RTCM 3.3; Trägerphase (RAWX) unterstützt.
-
Konfigurierbare Rate &und 1 PPS: 0,25–20 Hz Aktualisierung (Standard 1 Hz); zweiter Puls 0,25 Hz–10 MHz (Standardperiode 1 s, Hochpegel ~100 ns).
-
Duale UART (TTL) und SMA-K / IPEX Antennenoptionen; PC-Software zur Anzeige von Tracks und Geräteeinstellungen.
-
Anwendungsszenarien: UAV-Vermessung/Kartierung, autonome Traktoren/AGV, hochpräzise Fahrzeugnavigation, Robotik.
Wie RTK funktioniert (kurz)
Eine feste Basisstation berechnet den Satellitenmessfehler im Vergleich zu ihrer bekannten Position und sendet RTCM-Differenzdaten aus. Die mobile Station wendet diese Korrekturen an, um eine Echtzeit-Zentimeter-genaue Positionierung zu erreichen.
Kern-Spezifikationen
| Artikel | Spezi. |
|---|---|
| GNSS-Chip | ZED-F9P RTK GNSS-Modul |
| Konstellationen/Bänder | GPS L1/L2, GLONASS G1/G2, BeiDou B1/B2, Galileo E1/E5b, QZSS L1/L2 |
| Kanäle | 184 Suchkanäle |
| Empfindlichkeit | Tracking -167 dBm; Wiedererfassung -160 dBm; Kaltstart -148 dBm; Warmstart -157 dBm |
| RTK-Genauigkeit (CEP) | Horizontal/Vertikal: 0,01 m + 1 ppm CEP |
| Einzelpunktgenauigkeit (CEP) | Horizontal 1,5 m, Vertikal 1.5 m |
| Geschwindigkeitsgenauigkeit | 0,05 m/s |
| Kursgenauigkeit | 0,4° (dynamisch 0,3°) |
| 1PPS Zeitgenauigkeit | RMS 30 ns, 99% 60 ns |
| Start/Wiedererfassung | Kalt 24 s, Warm 2 s, Wiedererfassung 2 s; Konvergenz ≤10 s |
| Baudrate | 4 800–921 600 bps (Standard 115 200 bps) |
| Elektrisches Niveau | TTL |
| Protokolle | NMEA, UBX, RTCM 3.3; NMEA-Sätze: RMC/VTG/GGA/GSA/GSV/GLL |
| Aktualisierungsrate | 0.25–20 Hz (Standard 1 Hz); Hinweis: Sehr hohe Raten erhöhen die serielle Last – halten Sie ≤ 5 Hz für Zuverlässigkeit |
| Onboard-Flash | 4 MB, behält die Konfiguration nach dem Ausschalten |
| Trägerphase | RAWX Ausgabe unterstützt |
| Einschränkungen | Höhe ≤ 50 000 m; Geschwindigkeit ≤ 500 m/s; Beschleunigung < 4 g |
| Versorgung | DC 3.6–6.0 V (typ. 5.0 V), ≈ 80 mA @ 5 V |
| Betrieb / Lagerung | -40 °C bis +85 °C / -40 °C bis +105 °C |
| Abmessungen | 56 × 45 × 10 mm (vorderes Diagramm markiert ~46 mm Höhe) |
Schnittstellen &und Indikatoren
Antenne: SMA-K (mit IPEX Option).
UART-Ports (TTL, jeweils 4-polig):
-
P1 (rechts) – VI (3.6–6.0 V, 5 V rec.), G (GND), T1 (TX), R1 (RX).
-
P2 (links) – VO (3.6–6.0 V, 5 V rec.), G (GND), T2 (TX), R2 (RX).
P2 wird verwendet, um RTCM einzugeben/auszugeben; P1 gibt NMEA Daten aus. P1/P2 VCC sind intern verbunden – Strom von einem der beiden.
LEDs
-
PWR: Rot an = Stromversorgung aktiv.
-
TX1/TX2: Grün blinkt = Port hat Datenausgabe.
-
PPS: Aus vor Fix; Blaulicht blinkt nach 3D-Positionierung.
-
RTK: Aus, wenn nicht im RTK; Blaulicht blinkt im RTK Float; ein im RTK Fixed.
Verbindung & Software
-
Verdrahtete Einrichtung: Antenne an SMA anschließen; UART1 mit PC verbinden, um Standortdaten anzuzeigen.
-
Basis/Mobil: ein Modul als Basis festlegen (gibt RTCM aus); das Mobil verbraucht RTCM, um RTK zu erreichen – mobil kann direkt als RTK-Rover verwendet werden, nachdem Korrekturen empfangen wurden.
-
PC-Software: Verfolgungsvisualisierung, Datenansicht und Ein-Klick Basis/Rover-Konfiguration.
Hinweise
-
Die Standardbaudrate beträgt 115 200 bps. Wenn Sie die Ausgabefrequenz erhöhen, erhöhen Sie die Baudrate entsprechend, um Überlauf zu vermeiden (praktische obere Rate ≤ 5 Hz bei Standardverbindungen).
-
Benutzerdefinierte Entwicklung unterstützt.
Details
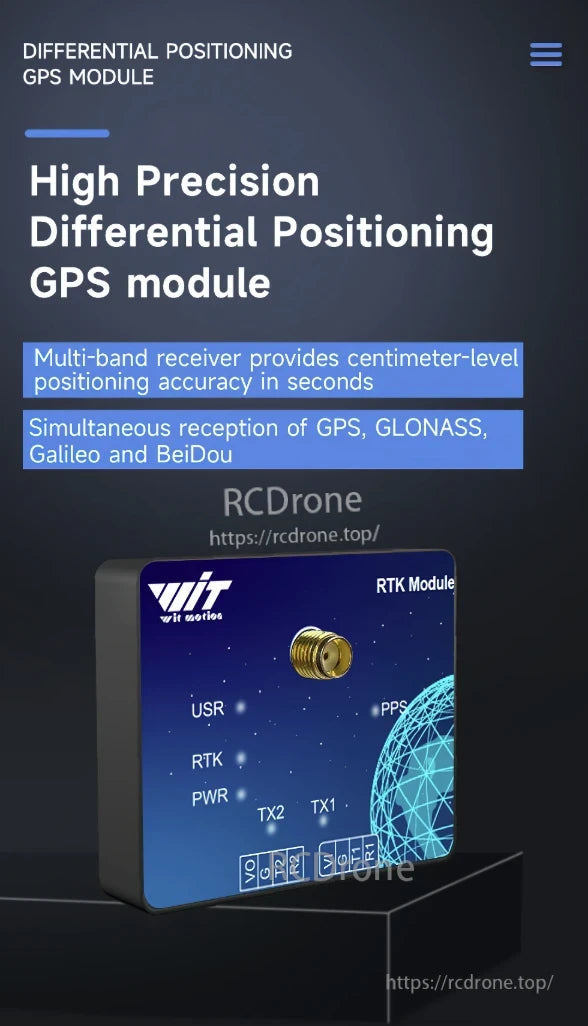
Hochpräzises Differentialpositionierungs-GPS-Modul mit Zentimeter-genauer Genauigkeit. Unterstützt GPS, GLONASS, Galileo, BeiDou.Multi-Band-Empfänger, RTK-Technologie, PPS, TX1, TX2, USR, RTK, PWR-Anzeigen.
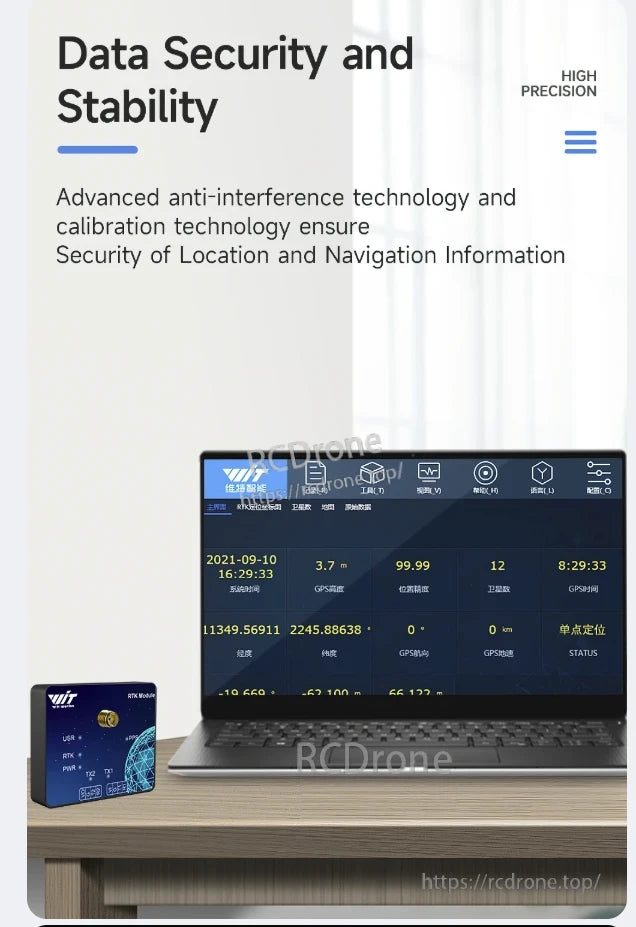
WitMotion WTRTK-M ZED-F9P RTK GNSS GPS gewährleistet hohe Präzision, Datensicherheit und Stabilität mit fortschrittlicher Anti-Interferenz- und Kalibrierungstechnologie für zuverlässige Standort- und Navigationsinformationen.
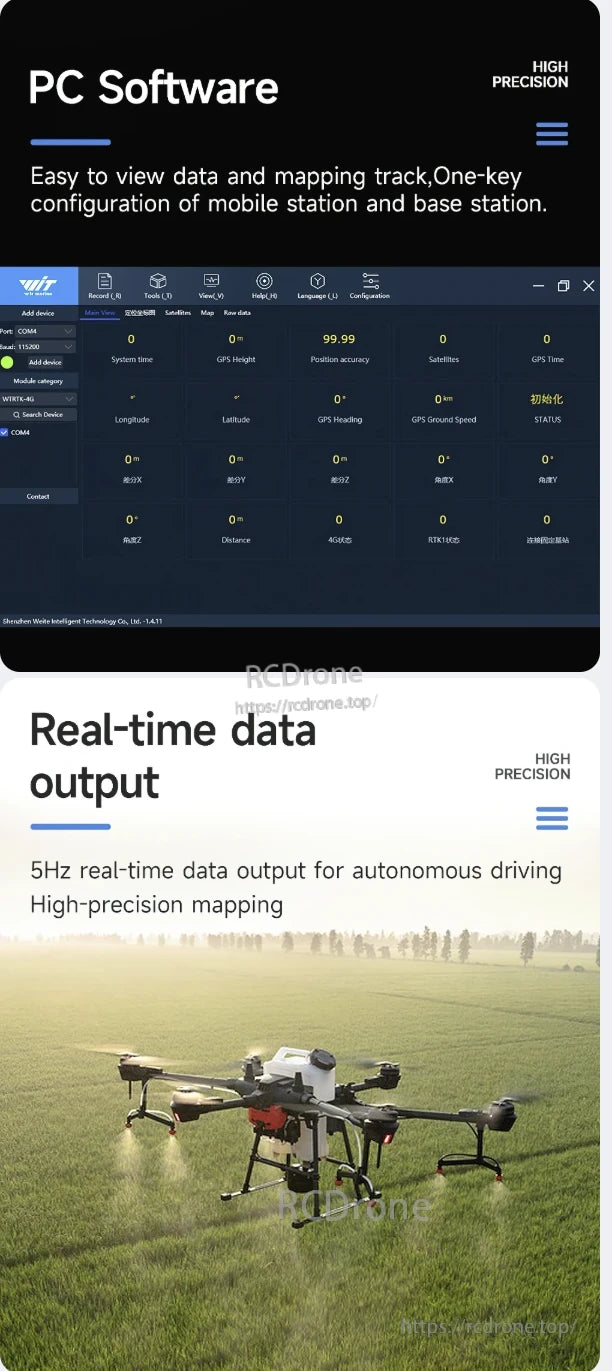
Hochpräzise RTK GNSS GPS-Software mit 5Hz Echtzeit-Datenausgabe für autonomes Fahren und Kartierung. Unterstützt die Ein-Klick-Einrichtung, Satellitenverfolgung, genaue Positionierung und detaillierte Telemetrie.
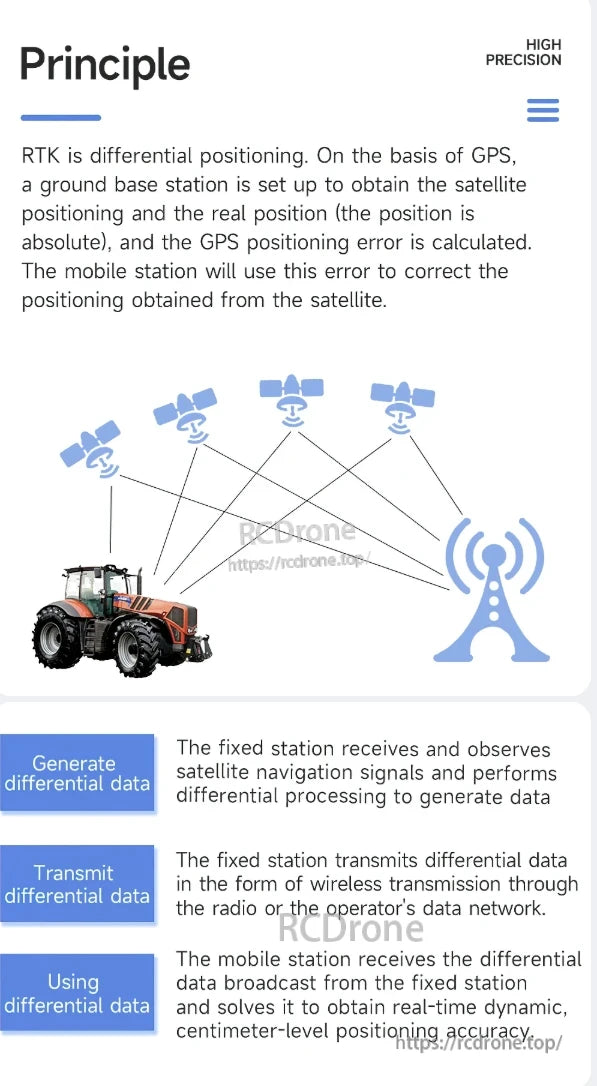
RTK verwendet die differenzielle Positionierung mit GPS. Eine feste Station berechnet Satellitenpositionierungsfehler und überträgt Korrekturen drahtlos an eine mobile Station, wodurch eine Echtzeitgenauigkeit im Zentimeterbereich für präzise Navigation ermöglicht wird.
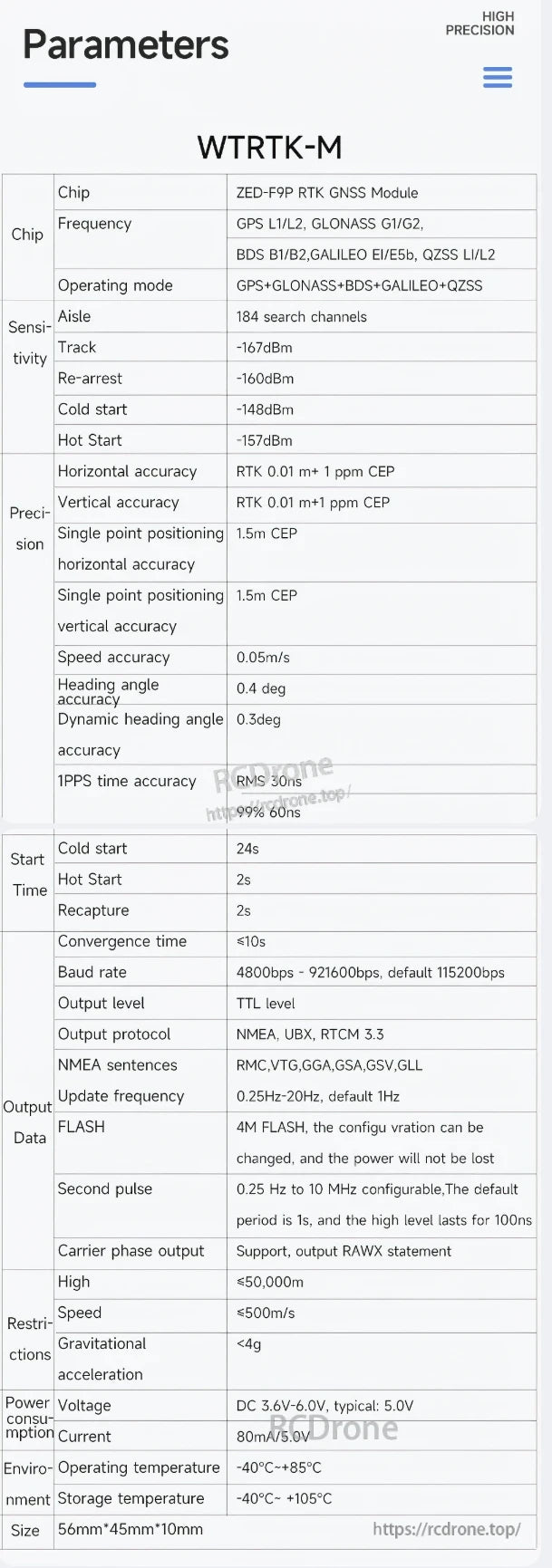
WTRTK-M verfügt über das ZED-F9P RTK GNSS-Modul mit Unterstützung für mehrere Konstellationen, hohe Präzision (0.01m), schnelle Startzeiten, mehrere Protokolle und funktioniert von -40°C bis +85°C.


Verdrahtungsdiagramm für das WitMotion RTK-Modul: Basis-/Mobilstationen, SMA-Antennen, UART1-PC-Verbindungen. Enthält Software, Handbuch, Video und Protokollressourcen.
Dualfrequenzantenne und Positionierungsmodul für hochpräzise GNSS GPS
Related Collections








