









Yahboom MSPM0 Intelligentes Roboterauto Aluminiumlegierung Chassis Kit (2WD/4WD) mit 520 Encoder-Motoren
Yahboom MSPM0 Intelligentes Roboterauto Aluminiumlegierung Chassis Kit (2WD/4WD) mit 520 Encoder-Motoren
Yahboom
Verfügbarkeit für Abholungen konnte nicht geladen werden
Überblick
Das Yahboom MSPM0 Smart Robot Car Aluminiumlegierung Chassis-Kit ist eine mobile Entwicklungsplattform auf Rädern, die für Elektronikdesign-Wettbewerbe, Ausbildung und Maker-Projekte konzipiert ist. Es verwendet eine zweischichtige Chassis-Struktur aus Aluminiumlegierung und unterstützt Zwei-Rad-Antrieb (2WD) oder Vier-Rad-Antrieb (4WD) Konfigurationen mit hochpräzisen Hall-Encoder-Getriebemotoren. Das Kit ist mit der MSPM0-Hauptsteuerplatine kompatibel und unterstützt die schnelle Integration von Motoren, Treibern und gängigen Robotersensoren.
Hauptmerkmale
- Rahmen aus Aluminiumlegierung; oxidiertes Sandstrahlverfahren
- 2WD / 4WD Chassis-Optionen (Länge und Breite sind gleich; verschiedene Versionen unterscheiden sich hauptsächlich in der Höhe)
- Mehrere reservierte Installationslöcher für flexible Erweiterung und Zubehörmontage
- 65 mm Hochreibung-Reifen; D-Typ Wellenkupplungsdesign zur Verringerung des Risikos, dass sich Reifen lösen
- Unterstützt hochpräzise Hall-Encoder-Reduktionsmotoren (L-Typ 520 Encoder-Motor)
- Kompatibel mit MSPM0 Hauptsteuerplatine und MSPM0 Roboter-Erweiterungsplatine
- Erweiterungsunterstützung für Bildverarbeitungsmodule (K210 / K230), Linienverfolgungsmodule (3/4/8-Kanal), MPU6050 oder 10-Achsen-IMU-Module und 2DOF elektrische PTZ-Montage
Spezifikationen
Chassis
| Chassistyp | 2WD Chassis (L-Typ 520 Encoder-Motor) / 4WD Chassis (L-Typ 520 Encoder-Motor) |
| Material / Prozess | Aluminiumlegierungsmaterial, oxidiertes Sandstrahlverfahren |
| Rad | 65 mm Hochreibungreifen |
| Abmessungen | 228 mm x 148 mm x 102.15 mm |
| 2WD Höhe | 88.5 mm |
| 4WD Höhe | 102.15 mm |
| Erscheinungsgröße | Länge < 25 cm, Breite < 15 cm, Höhe < 15 cm |
| Leerlaufgeschwindigkeit | 1.2 m/s< |
| Maximale Last (2WD) | 8 kg |
| Maximale Last (4WD) | 10 kg |
| Maximale Last (Rotation) | 2WD: 8 kg; 4WD: 4 kg |
| Maximale Last (gerade) | > 10 kg |
| Last 1 kg Steigungswinkel | 2WD: 25 Grad; 4WD: 30 Grad |
| Gewicht | 676.6 g bis 1662.9 g (variiert je nach ausgewählter Version) |
| Empfohlene Stromversorgung Batterie | 12 V Lithium-Batteriepack |
| Encoder | 11-Leiter Hall AB Phasen-Encoder |
L-Typ 520 Encoder Motor
| Motor Nennspannung | 12 V |
| Nennstrom | 0,5 A |
| Sperrstrom | 4 A |
| Getriebesatz Übersetzungsverhältnis | 1:40 |
| Abtriebswelle | Durchmesser 6 mm D-Typ exzentrische Welle |
| Sperrmoment | 10 kg*cm |
| Nennmoment | 4.4 kg*cm |
| Geschwindigkeit vor der Verzögerung | 12000 U/min |
| Geschwindigkeit nach der Verzögerung | 300 U/min ± 5% |
| Encodertyp | AB-Phasen-Inkremental-Hall-Encoder |
| Encoder-Versorgungsspannung | 3,3 V bis 5 V |
| Anzahl der Magnetringlinien | 11 Linien |
| Schnittstellentyp | PH2.0-6P |
| Nennleistung | 6 W |
| Gewicht des einzelnen Motors | 159.2 g |
MSPM0 Master-Steuerplatine (MSPM0G3507)
| Kern | Cortex M0 |
| Anzahl der Pins | 48 |
| Schnittstellenressourcen | 2 x SPI, 4 x USART, 2 x I2C, 1 x CAN, 32 x I/OD, 1 x DAC |
| Timer | 7 |
| Analog zu Digital | 2 x ADC (12-Bit/17-Kanal) |
| SRAM | 32K |
| Interner FLASH | 128k |
| Externer FLASH | 4M |
| Pin-Gehäuse | LQFP48 |
| Compiler-Tool | KEIL MDK, CCS, etc. |
| Spannungsbereich (ADC) | Externe Spannung: 1,62 V bis 3,6 V; Kernspannung: 2.5 V |
| BOOT0-Pin | Kein BOOT0-Pin |
| Hauptfrequenzuhr | 80 MHz |
| Stromverbrauch | Schlafmodus: 2,76 mA; Standby-Modus: 1,5 uA; Betriebsstromverbrauch: 8 mA/80 M |
| Programmdownload | SWD oder serielle Schnittstelle Ein-Klick-Download |
| LED | Rote Stromanzeige, benutzerdefinierte LED-Leuchten*2 |
| Knopf | Reset-Taste, benutzerdefinierte Taste |
| Schnittstelle | SWD-Debug-Schnittstelle, Typ-C-Schnittstelle, LCD-Display-Schnittstelle |
| Abmessungen | 18,89 x 51.12 mm |
| Gewicht | 7 g |
MSPM0 Roboter-Erweiterungsplatine (Schnittstellen)
| Motorantrieb | 4-Kanal-Encoder-Motorantrieb-Schnittstelle |
| Seriell | Serielle Schnittstelle (2 Standorte) |
| IIC | IIC-Schnittstelle (2 Standorte) |
| Vision-Modul | K210 Vision-Modul-Schnittstelle |
| Tracking-Module | 8-Kanal-Tracking-Modul-Schnittstelle; 4-Kanal-Tracking-Modul-Schnittstelle; 3-Kanal-Tracking-Modul-Schnittstelle |
| Servo | Servo-Schnittstelle; reservierte 2-Kanal tPWM Servo-Schnittstelle |
| CCD | CCD-Modul-Schnittstelle |
| Elektromagnetisch | Elektromagnetische Modul-Schnittstelle |
| GPIO-Header | 40Pin GPIO-Pin-Header |
| Stromversorgung | 5-12 V Stromversorgungseingang; Stromversorgungsausgang |
| Sonstiges | Schalter; Summer; benutzerdefinierte Taste |
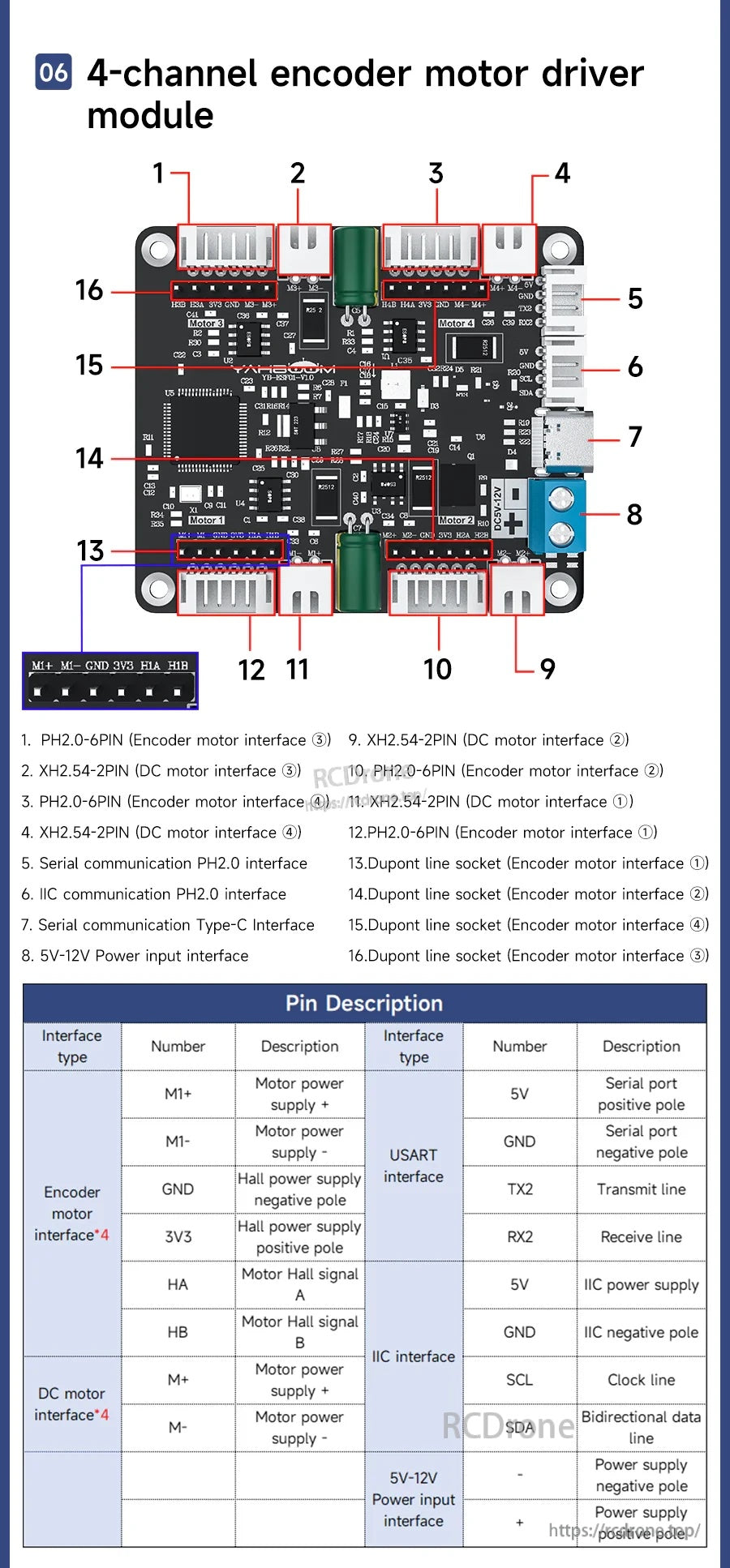
4-Kanal Encoder Motor Treibermodul
| Motor Schnittstellen | PH2.0-6PIN Encoder-Motor-Schnittstellen; XH2.54-2PIN DC-Motor-Schnittstellen; Dupont-Leitungsbuchsen für Encoder-Motor-Schnittstellen |
| Kommunikation | Serielle Kommunikationsschnittstelle PH2.0; IIC-Kommunikationsschnittstelle PH2.0; Serielle Kommunikationsschnittstelle Typ-C |
| Stromeingang | 5 V bis 12 V Stromeingangsschnittstelle |
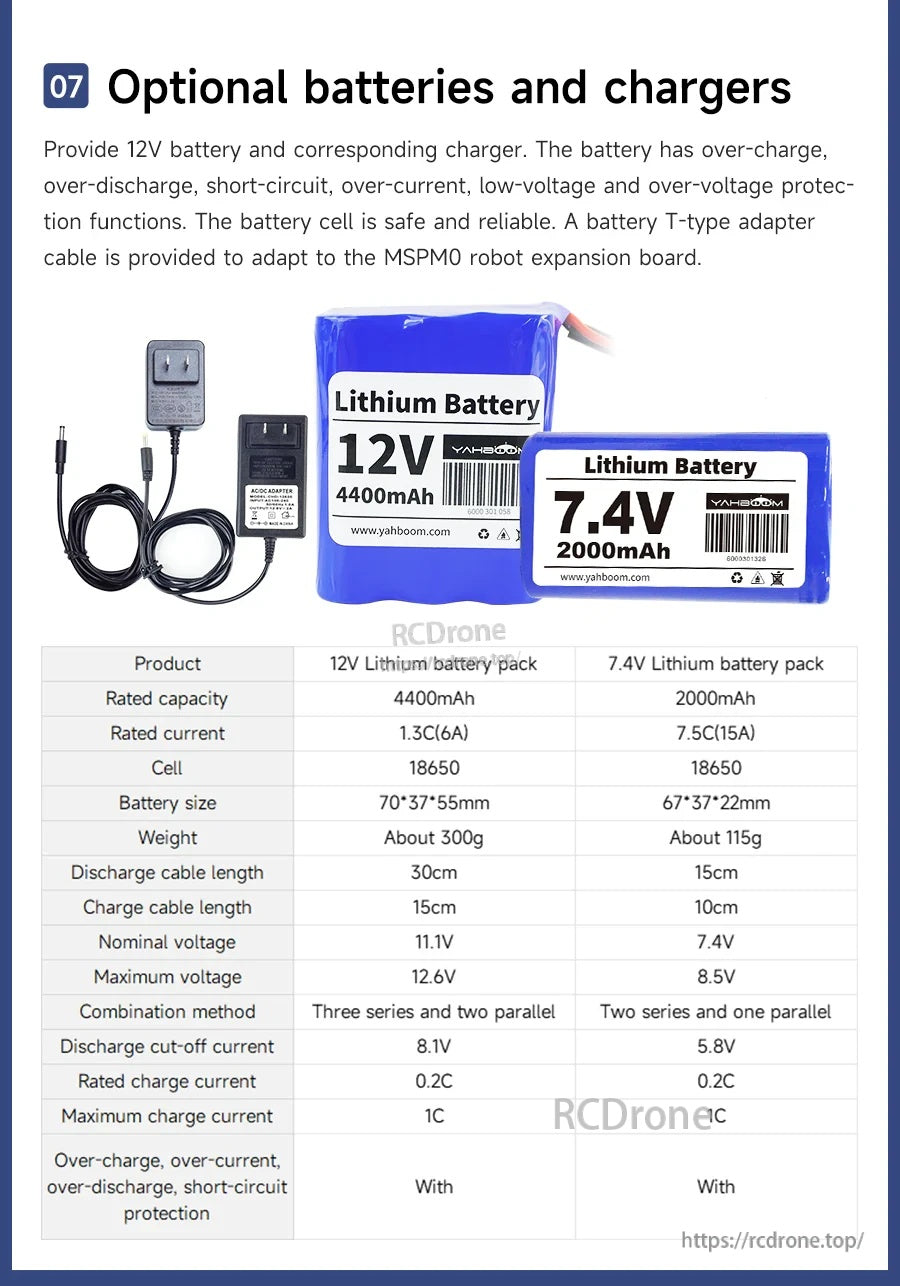
Optionale Batterien (mit entsprechendem Ladegerät)
| Batteriepack | 12 V Lithium-Batteriepack | 7,4 V Lithium-Batteriepack |
| Nennkapazität | 4400 mAh | 2000 mAh |
| Nennstrom | 1,3C (6A) | 7.5C (15A) |
| Zelle | 18650 | 18650 |
| Batteriegröße | 70 x 37 x 55 mm | 67 x 37 x 22 mm |
| Gewicht | Etwa 300 g | Etwa 115 g |
| Entladekabellänge | 30 cm | 15 cm |
| Ladekabellänge | 15 cm | 10 cm |
| Nennspannung | 11,1 V | 7,4 V |
| Maximale Spannung | 12,6 V | 8,5 V |
| Kombinationsmethode | Drei in Serie und zwei parallel | Zwei in Serie und eine parallel |
| Entladeabschaltung | 8,1 V | 5,8 V |
| Nennladestrom | 0,2C | 0.2C |
| Maximaler Ladestrom | 1C | 1C |
| Schutz | Überladung, Überstrom, Tiefentladung, Kurzschlussschutz | Überladung, Überstrom, Tiefentladung, Kurzschlussschutz |
Lieferumfang
- Aluminiumlegierung Fahrgestell mit Rädern (2-Schicht-Struktur)
- L-Typ 520 Encoder-Motor(en) und 65 mm Reifen (abhängig von 2WD / 4WD Version)
- MSPM0 Hauptsteuerplatine (MSPM0G3507)
- MSPM0 Roboter-Erweiterungsplatine
- 4-Kanal-Motortreiberplatine/-modul
- Montagezubehör (M3*6 mm Rundkopfschraube; M3*20+6 mm Einweg-Kupfersäule; M3*40+6 mm Einweg-Kupfersäule)
- Batterie und Ladegerät (optional)
Für Auswahl- und Integrationshilfe (2WD/4WD und optionales Batterie/Ladegerät), kontaktieren Sie https://rcdrone.top/ oder E-Mail [email protected].
Anwendungen
- Elektronische Designwettbewerbe
- Bildungsrobotik-Training und schnelles Prototyping
- Maker-Projekte: Linienverfolgung (3/4/8-Kanal), IMU-basierte Lageerkennung (MPU6050 / 10-Achsen-IMU) und Zusatz-Vision-Module (K210 / K230)
- Zubehörmontageunterstützung für Artikel wie 2DOF elektrisches PTZ, 9G Servo/PTZ, Lidar-Module (Tmini-Plus Lidar, X3 Pro Lidar) und 3,5-Zoll-Bildschirm (Montageloch-Unterstützung)
Handbücher
Offizielles Tutorial: http://www.yahboom.net/study/wheeled_chassis
Details

Wählen Sie 2WD oder 4WD auf demselben Aluminium-Zweischicht-Chassis-Fußabdruck, entworfen für schnelle Roboterentwicklung und -aufrüstungen.
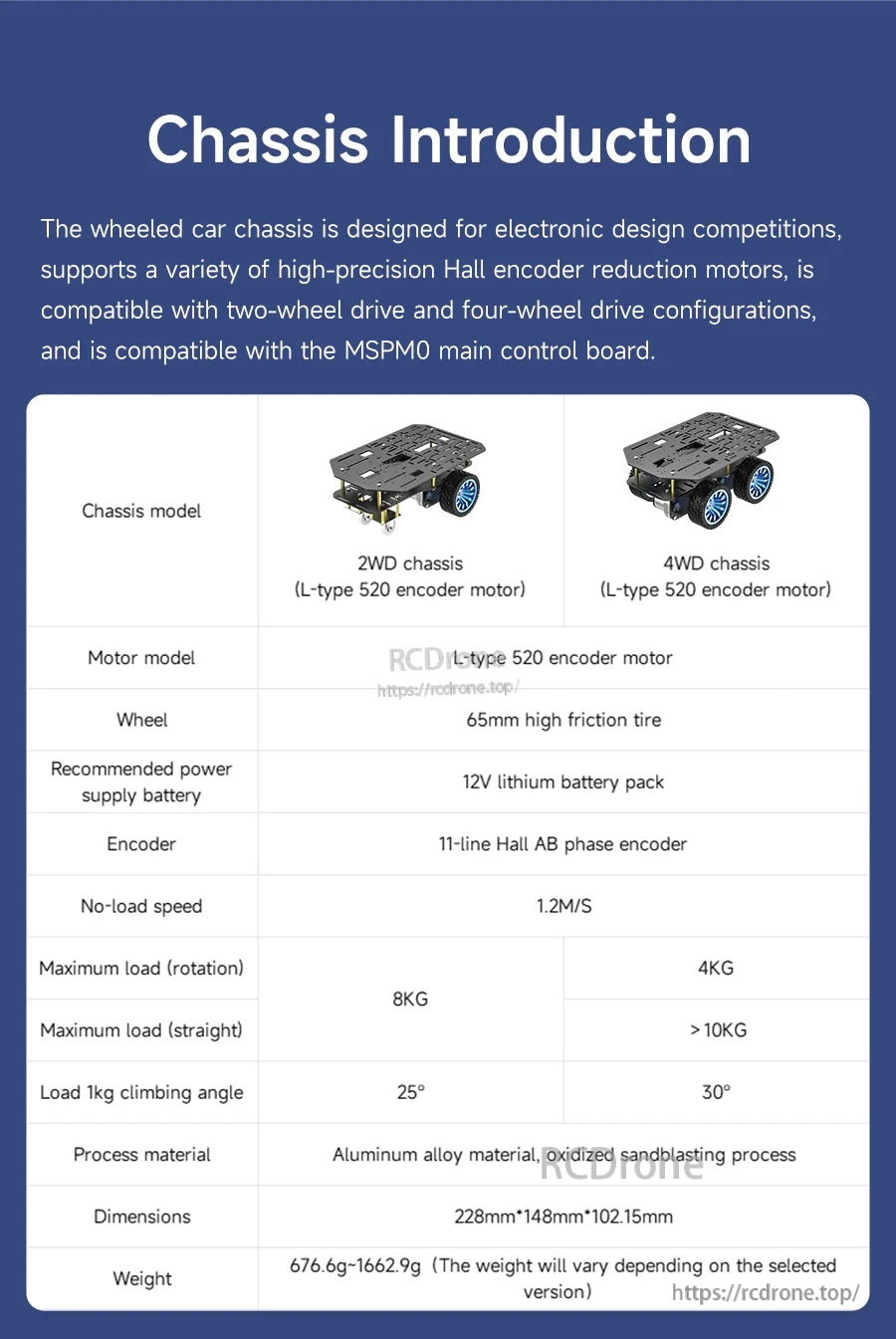
Kern-Chassis-Spezifikationen auf einen Blick, einschließlich Radgröße, Encodertyp, Geschwindigkeit, Lastgrenzen und Gesamtabmessungen.
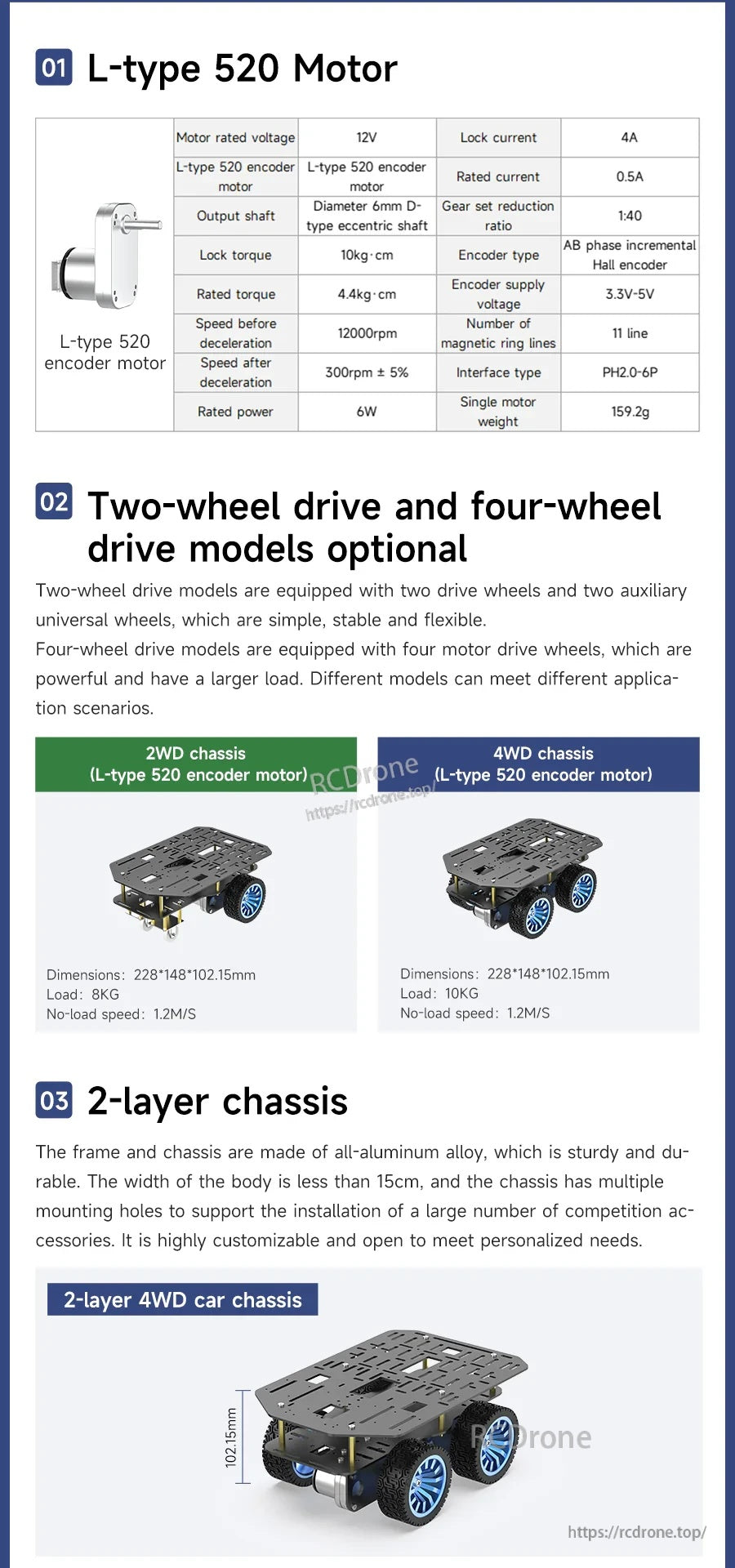
Hochpräzise Hall-Encoder-Motoren und ein starres Legierungsrahmen bieten eine zuverlässige Basis für Wettbewerbs- und Klassenraumprojekte.

Optionale Abstandshalter und Befestigungselemente helfen, die Chassishöhe anzupassen, um zusätzliche Module und Verkabelungen aufzunehmen.
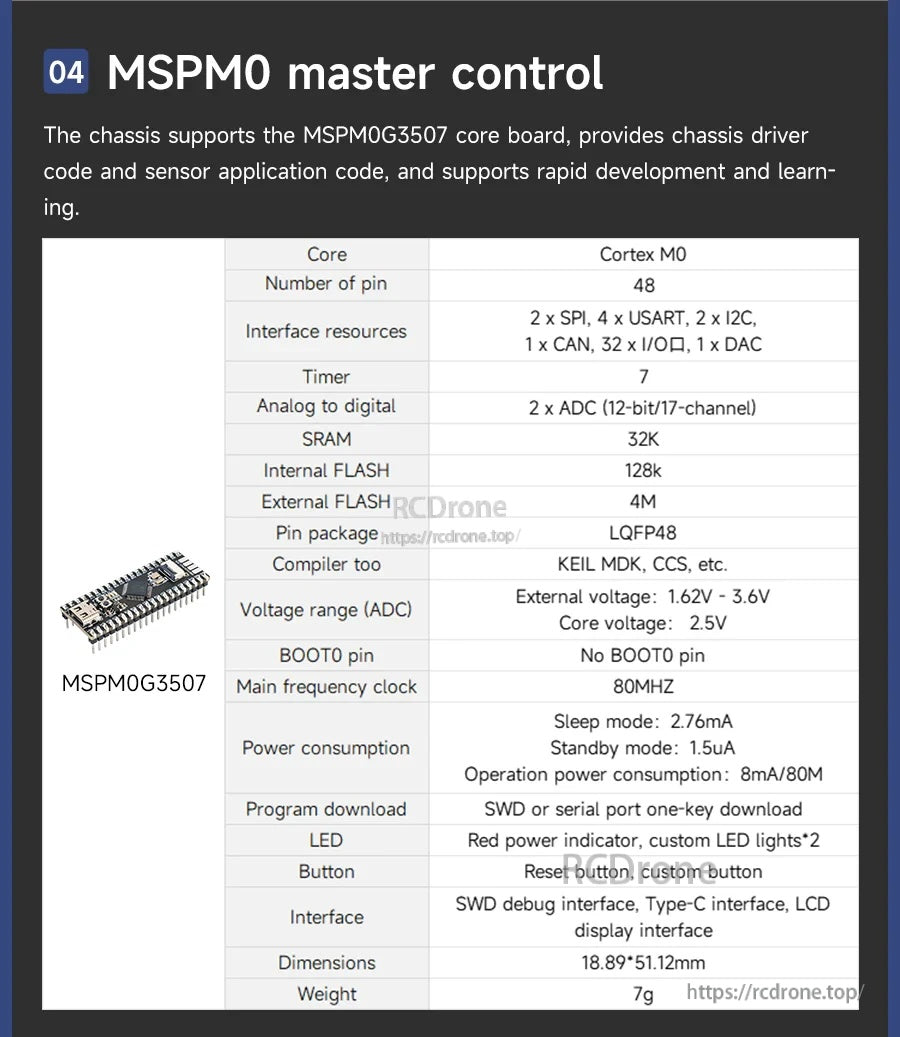
Die Spezifikationen des MSPM0G3507-Kernboards unterstützen eine schnelle Inbetriebnahme mit gängigen Schnittstellen für Motoren, Sensoren und Peripheriegeräte.
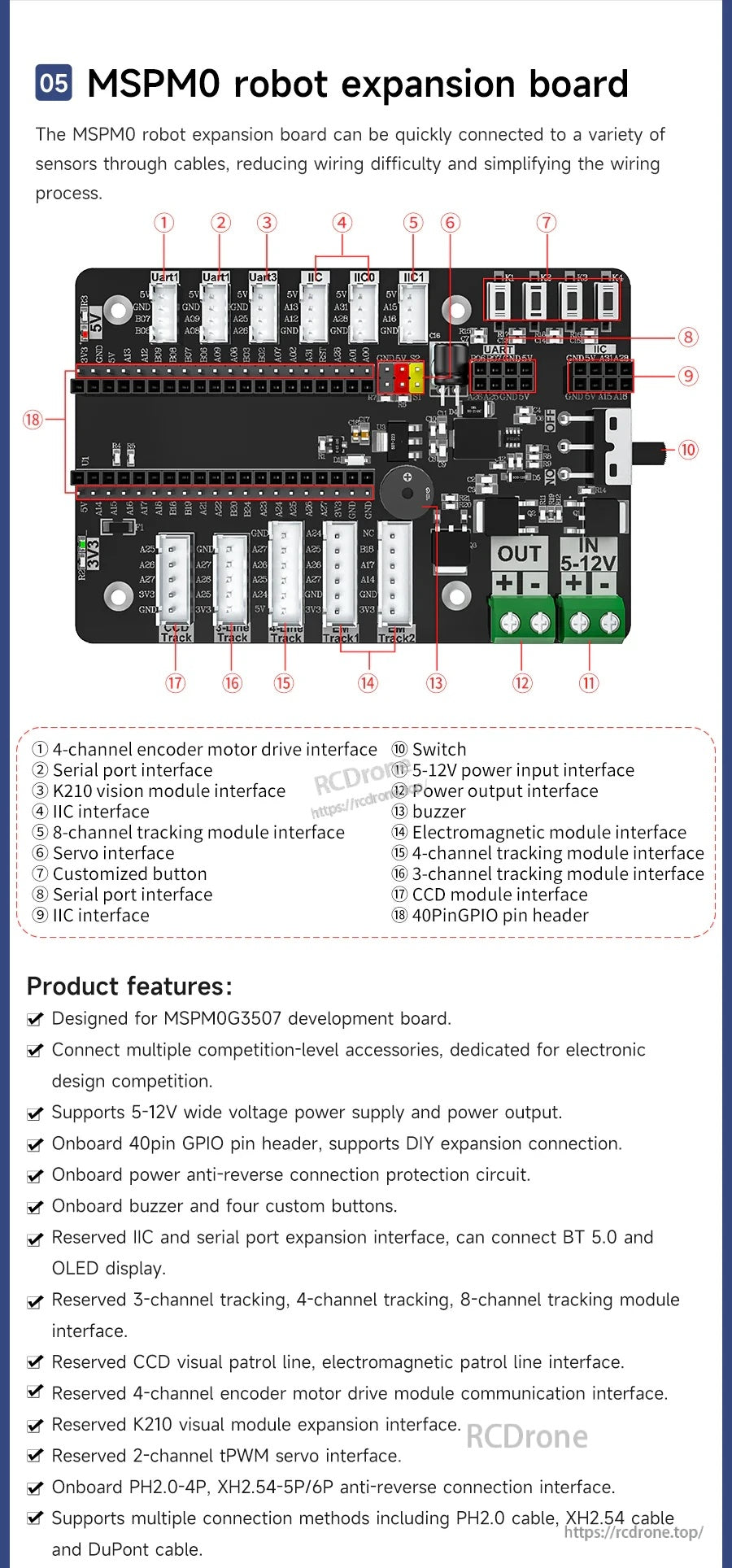
Die Erweiterungsplatine konsolidiert Motor-, Encoder-, Sensor- und Stromanschlüsse, um die Verkabelung während des Aufbaus zu vereinfachen.
Ein dedizierter 4-Kanal-Treiber unterstützt die Encoder-Rückmeldeverkabelung und die stabile Motorsteuerung für 2WD- oder 4WD-Konfigurationen.
Stromversorgungsoptionen umfassen Lithium-Akkupacks und passende Ladegeräte für tragbare Tests und Vorführungen im Feld.

Die D-Wellenkupplung und die hochreibungsfähigen Reifen sind darauf ausgelegt, das Durchrutschen der Räder zu reduzieren und zu verhindern, dass sich die Reifen lösen.
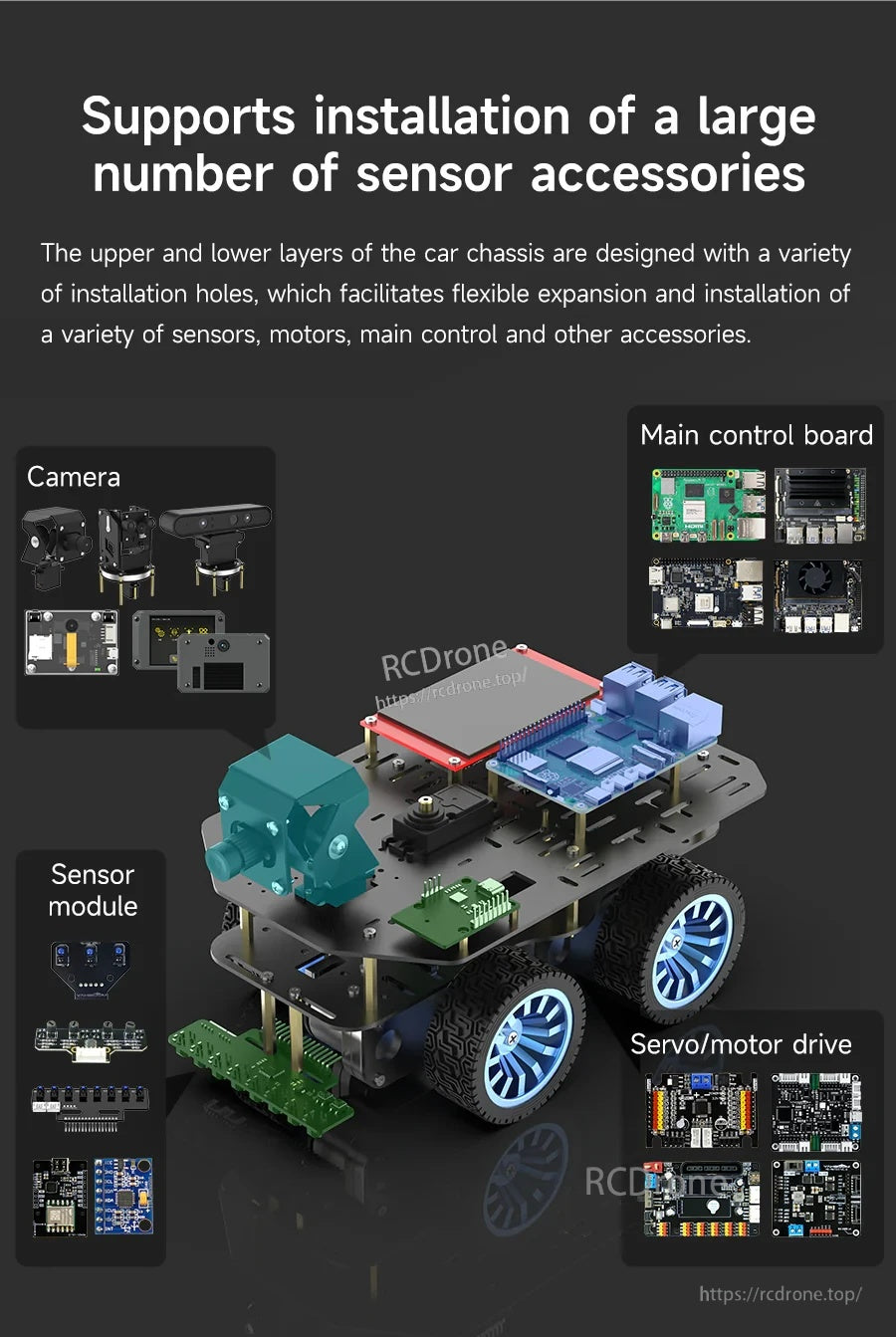
Reservierte Befestigungslöcher erleichtern das Hinzufügen von Vision-, Tracking-, IMU- und Treiberplatinen, wenn das Projekt wächst.

Reservierte Löcher unterstützen beliebte Vision-Module mit einer verstellbaren Halterung zur Anpassung des Kamerawinkels.

Erweitern Sie mit Linienverfolgungs- oder IMU-Modulen für Navigation, Lageerkennung und geschlossene Regelungsexperimente.

Eine 2DOF PTZ-Halterung fügt Schwenk-/Neigefähigkeit für kamerabasierte Verfolgungs- und Inspektionsaufgaben hinzu.
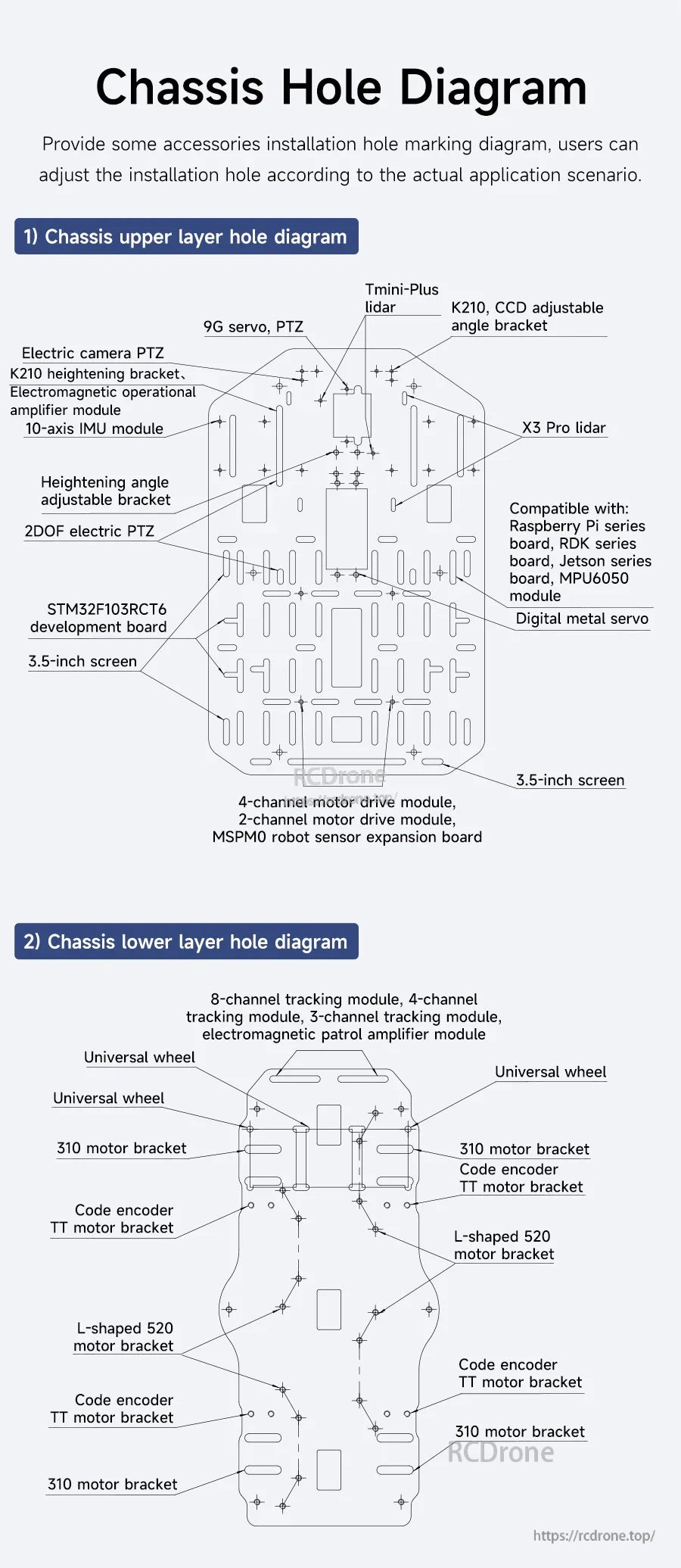
Lochkarten helfen bei der Planung der Komponentenplatzierung vor der Montage, insbesondere bei Multi-Sensor-Aufbauten.



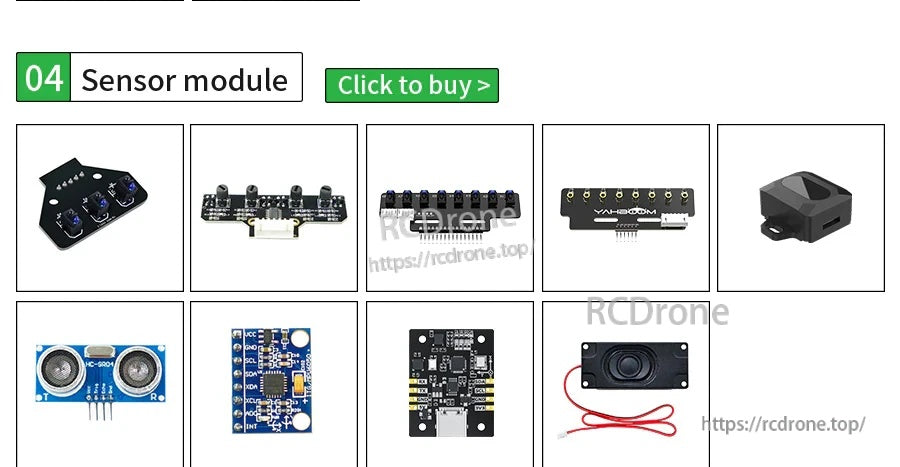
Eine Auswahl an Sensormodulen, darunter ein Ultraschall-Abstandssensor und eine kleine Kamera, erweitert die Sensoroptionen des Yahboom MSPM0 Smart Robot.

Der MSPM0 Smart Robot unterstützt eine Kamera-/Visualmodul-Konfiguration mit einem Bildschirm und einer kompakten Kameraeinheit für visuelle Projekte.
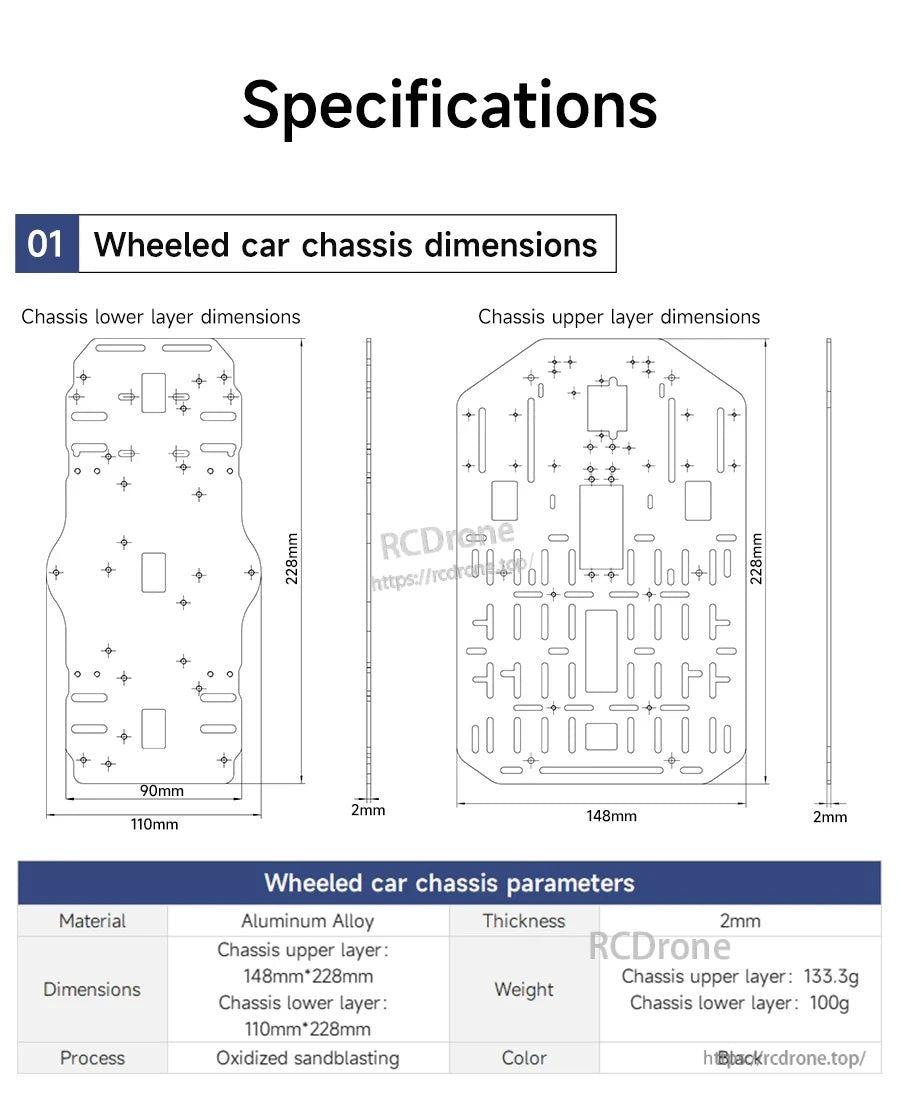
Das Aluminiumlegierung-Radfahrgestell verwendet 2 mm dicke Platten mit den Maßen 148×228 mm (oben) und 110×228 mm (unten), mit angegebenen Gewichten von 133,3 g und 100 g.
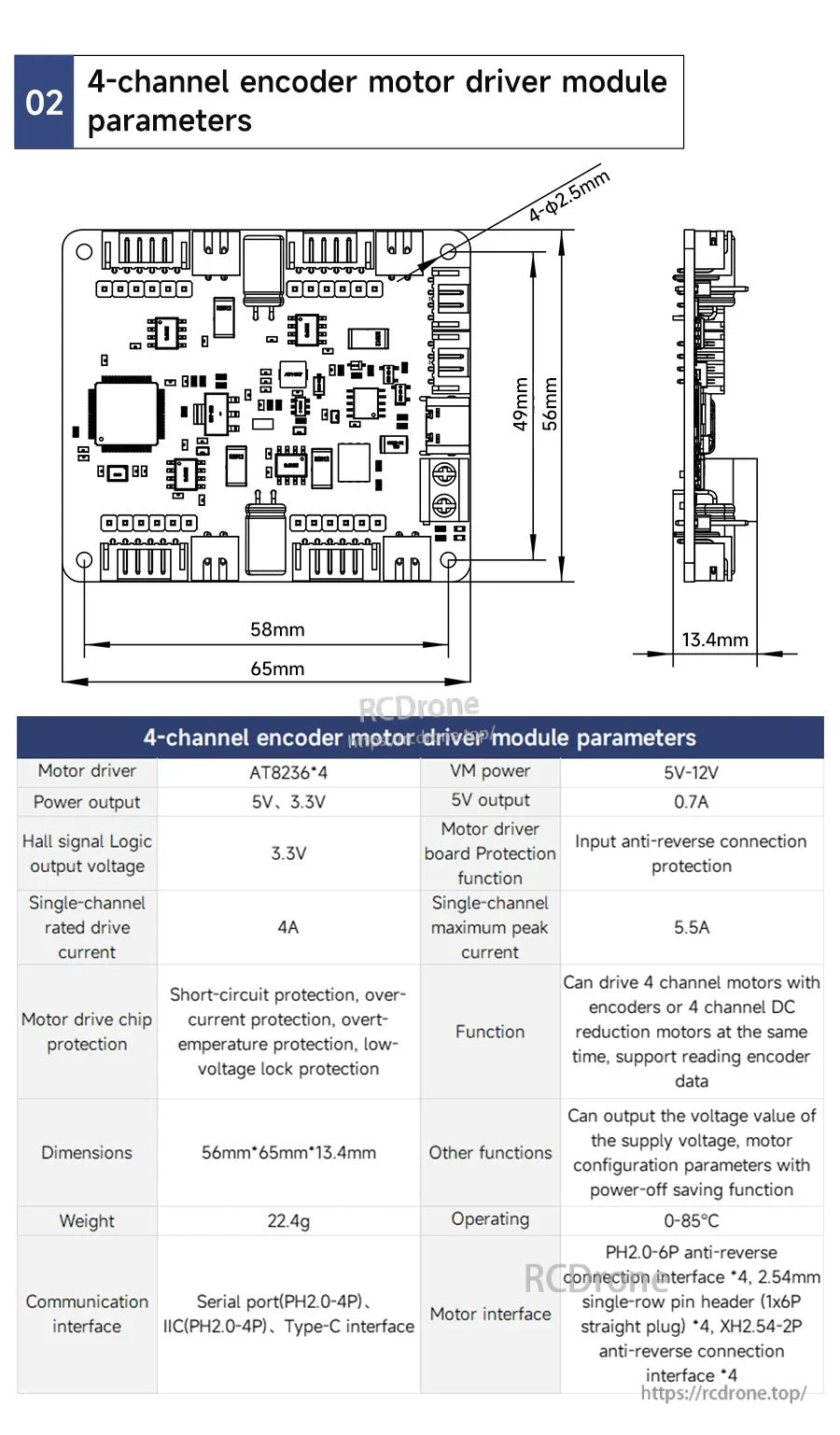
Das 4-Kanal-Encoder-Motortreiber-Modul enthält ein beschriftetes Anschlusslayout und wichtige Spezifikationen wie die Größe 56×56×13,4 mm und einen Motorleistungseingang von 5–12 V.
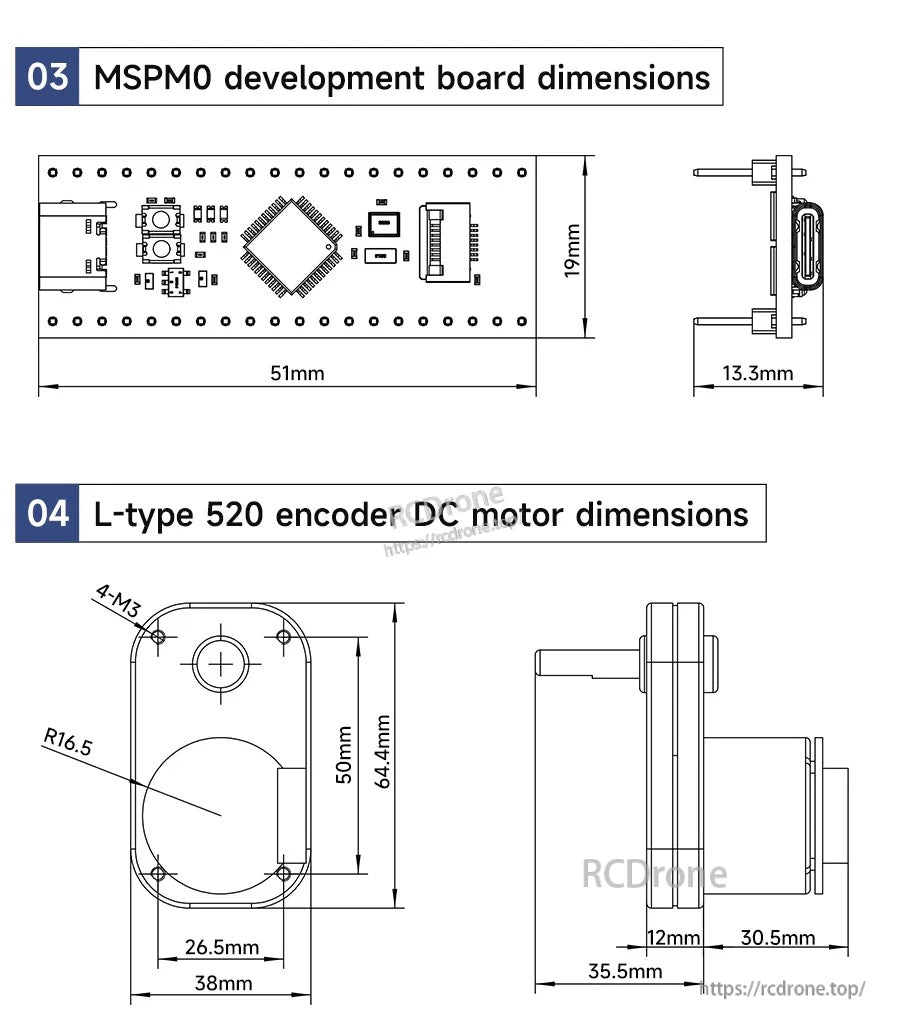
Das MSPM0-Entwicklungsboard misst etwa 51 × 19 mm, und die L-Typ 520 Encoder-DC-Motorzeichnung bietet wichtige Montage- und Körpermaße für den Einbau in einen Roboterbau.
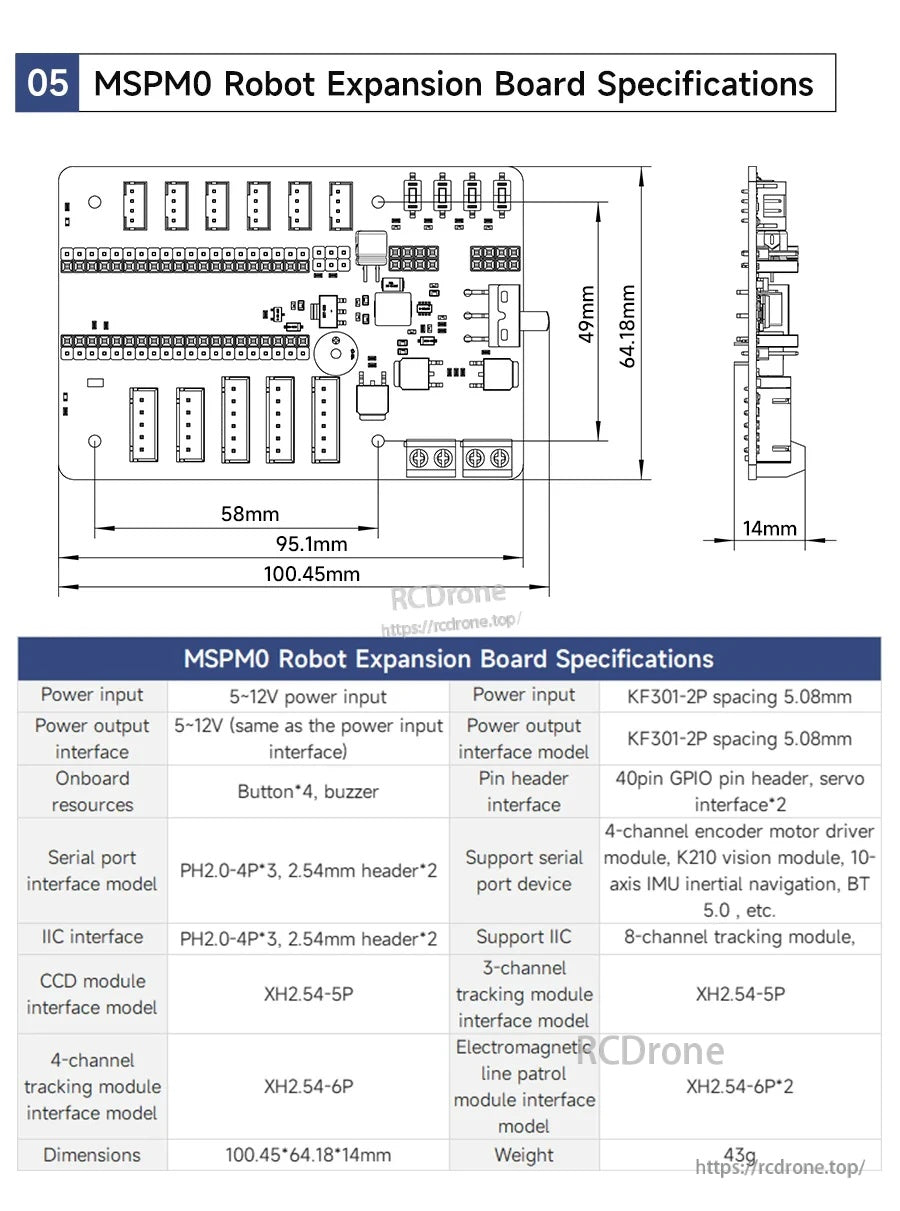
Das MSPM0-Roboter-Erweiterungsboard verwendet einen 5–12 V Leistungseingang und bietet eine 40-Pin-GPIO-Schnittstelle in einem Formfaktor von 100,45×64,18×14 mm.
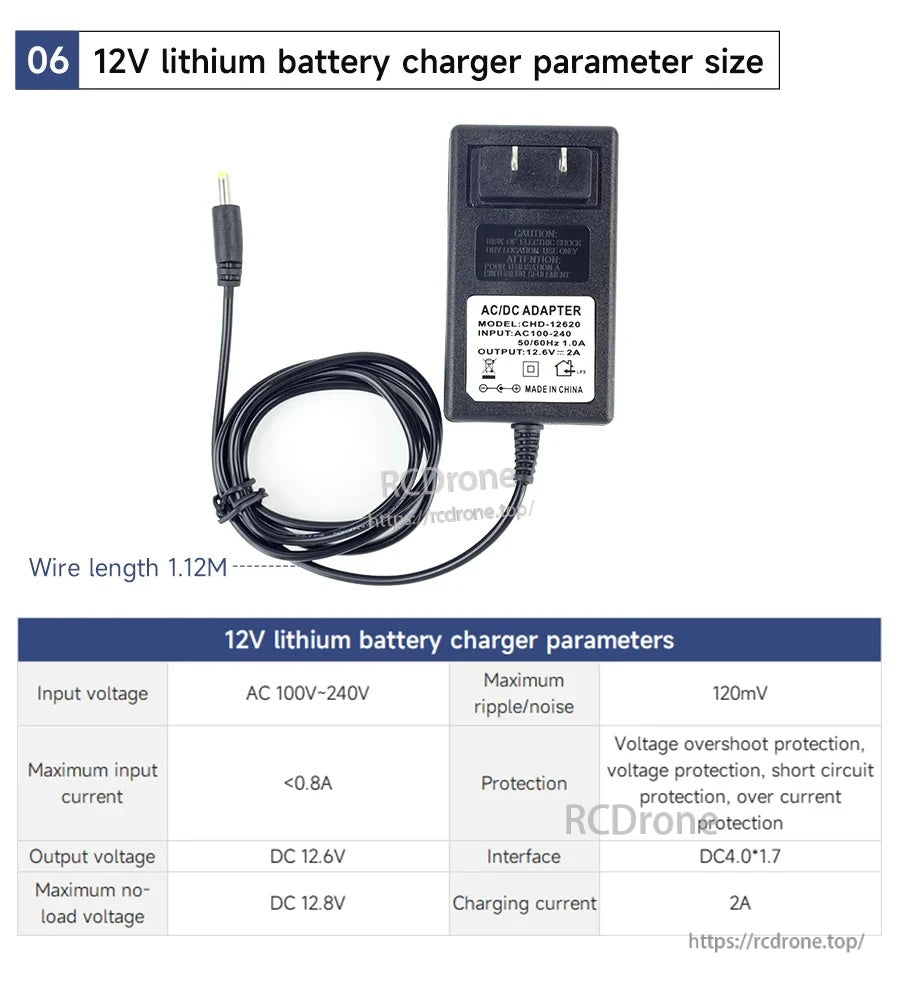
Das 12V-Lithium-Batterieladegerät enthält einen AC 100–240V Eingangsadapater mit DC 12,6V, 2A Ausgang und einem DC 4,0×1,7mm Anschluss für einfaches Laden.
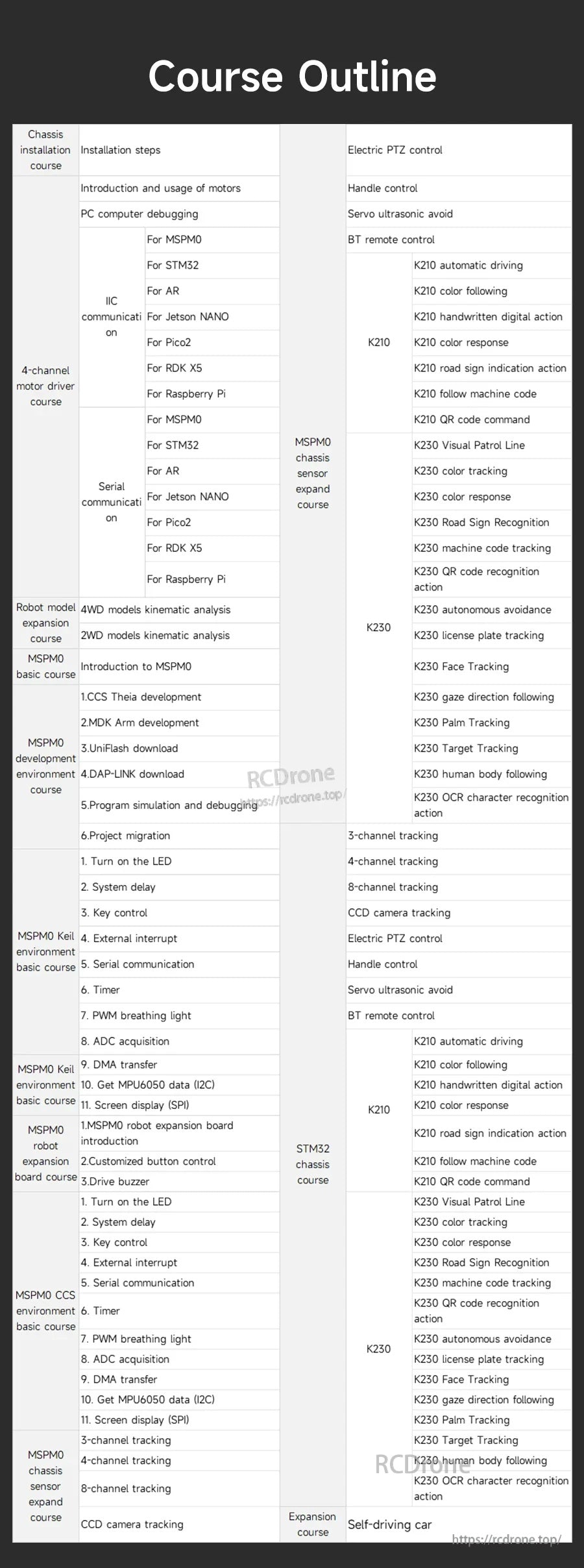
Der Kursplan unterteilt das Lernen in Kapitel und Lektionsthemen, um die Einrichtung, Programmierung und praktische Roboterprojekte zu leiten.

Die Ressourcen des Yahboom MSPM0 Smart Robot umfassen organisierte Tutorial-Download-Ordner für das Chassis, das 4-Kanal-Motortreibermodul und den RCDrone.
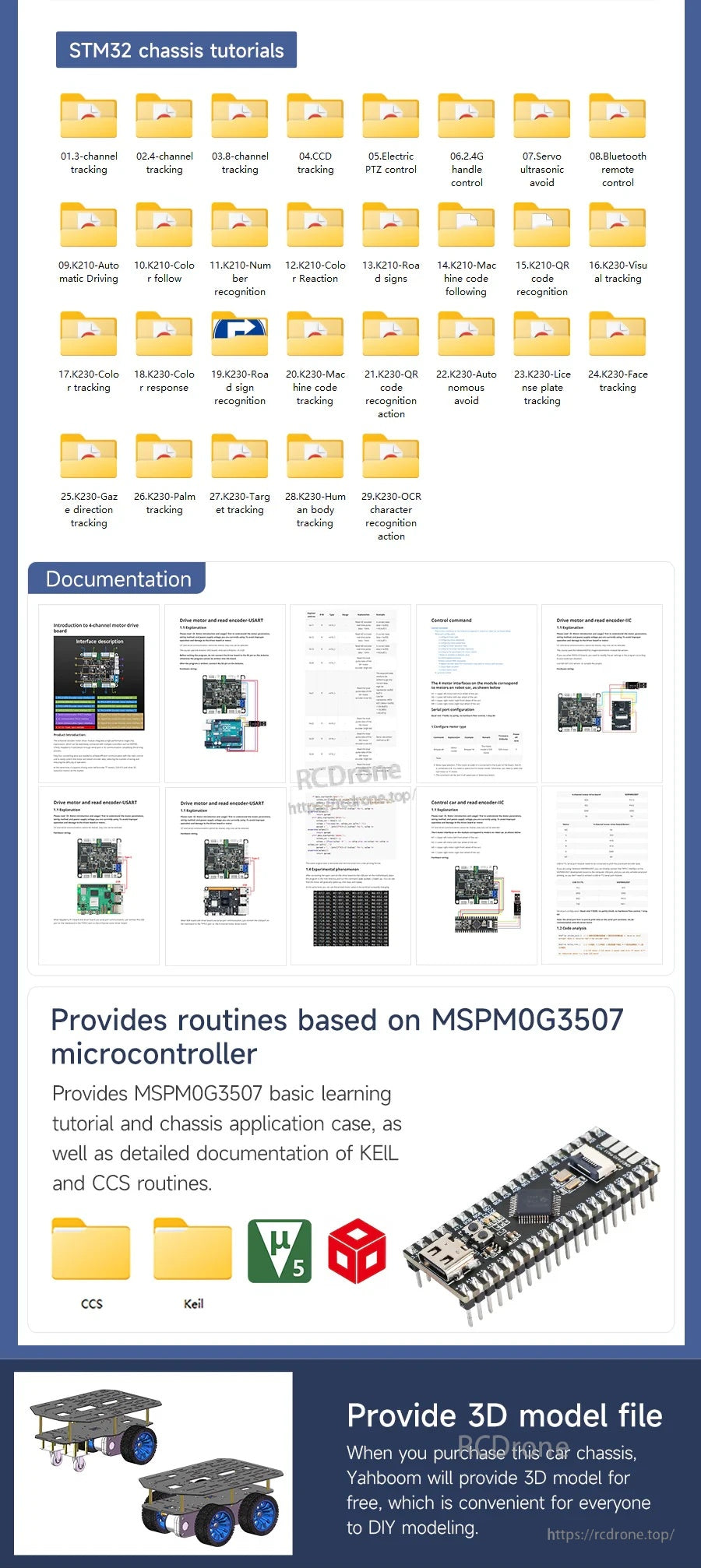
Die Ressourcen des Yahboom MSPM0 Smart Robot umfassen herunterladbaren Routinecode, Dokumentationsdateien und 3D-Modellressourcen für den Bau und die Programmierung.

Der Yahboom MSPM0 Smart Robot unterstützt eine Bluetooth-Fernsteuerungs-App für iOS und Android, mit einem Bildschirm-Joystick und Steuerungstasten.
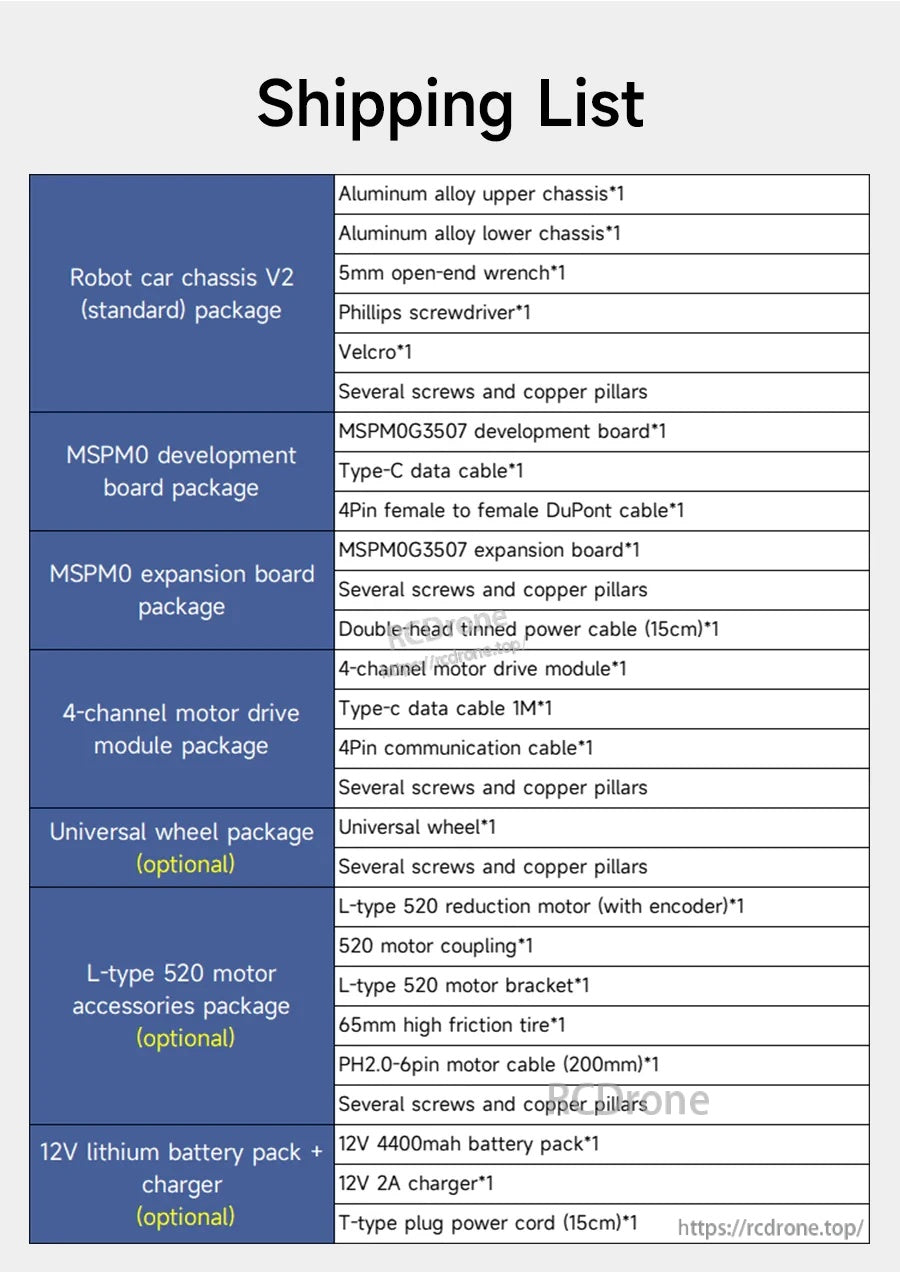
Die Versandliste enthält die enthaltenen Teile des Roboterauto-Chassis, die MSPM0G3507-Erweiterungsplatine, das Type-C-Kabel und das 4-Kanal-Motortreibermodul, mit optionalen Rad- und Batteriepaketen.












