Yahboom YB-EST01-V2.0 STM32F103RCT6 Treiber-Erweiterungsplatine für selbstbalancierendes Roboterauto (Typ-C CH340K)
Yahboom YB-EST01-V2.0 STM32F103RCT6 Treiber-Erweiterungsplatine für selbstbalancierendes Roboterauto (Typ-C CH340K)
Yahboom
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
Dieses STM32 Treiber-Erweiterungsboard ist für den Bau eines selbstbalancierenden Roboterautos. konzipiert. Es kombiniert eine integrierte STM32F103RCT6 Kernsteuereinheit mit einem 2-Kanal-Encoder-Motortreiber-Schaltkreis, sowie mehrere Erweiterungsschnittstellen für Sensoren und Module. Es unterstützt Projekterweiterungen mit Ultraschall, PS2-Controller, OLED-Display, Lidar, Bluetooth, CCD-Kamera, elektromagnetischer/Linienverfolgung und einem K210-Visionsmodul für KI-visionbezogene Funktionen. Eine Bluetooth-App wird unterstützt, um Roboterdaten-Wellenformen anzuzeigen und PID-Parameter in Echtzeit anzupassen, um die Balanceleistung zu optimieren.
Hauptmerkmale
- Integrierter STM32F103RCT6 Kern-MCU für Balancekontrolle und Entwicklung.
- Stromeingang: 8V-13V Weitspannungseingang.
- Typ-C Ein-Klick-Schreiben/Herunterladen: integrierter CH340K serieller Download-Schaltkreis; Programme können direkt mit einem Typ-C-Datenkabel geschrieben werden.
- Motorsteuerung: 2-Kanal-Motortreiberschaltung; unterstützt das Ansteuern von 2-Kanal-Motoren, das Auslesen von Encoder-Daten und die Überwachung der Motordrehzahl.
- Schnittstellen (onboard/Erweiterung): Bluetooth-Kommunikationsschnittstelle (unterstützt Bluetooth 5.0-Module), PS2-Handle-Schnittstelle, OLED-Display-Schnittstelle, Lidar-Kommunikationsschnittstelle, Ultraschallmodul-Schnittstelle, CCD-Kamera-Schnittstelle, elektromagnetische Linienverfolgungsschnittstelle, 4-Kanal-Linienverfolgungsmodul-Schnittstelle, K210-Visuelle-Kommunikationsschnittstelle.
- Onboard-Funktionen: Programm-Debugging-Schnittstelle, aktiver Summer, benutzerdefinierte Taste, Schaltungsschutz.
- Spannungserkennung: Onboard-Spannungserkennungsschaltung; die Batteriespannung des Roboterautos kann in Echtzeit über die Bluetooth-App überprüft werden.
- Sicherheitsschutz: Verpolungsschutz, Überstromschutz, Überspannungsschutz, Überhitzungsschutz, Blockierschutz.
- Unterstützte Erweiterungsbeispiele: Ultraschall-Entfernungsmessung/-verfolgung/-Hindernisvermeidung; OLED-Datenanzeige (Balance-Car-Daten und Batteriespannung); 4-Kanal-Tracking-Sensor für rechtwinklige Kurven und Kreuzungen; K210-Visionsfunktionen wie visuelle Linienverfolgung, Farbverfolgung und Bildcode-Steuerung.
Hinweis: Wenn ein anderer Motor verwendet wird, überprüfen Sie sorgfältig die Anschlussreihenfolge der Motoren an der Treiberplatine, um sicherzustellen, dass sie mit der Anschlussreihenfolge des Motors übereinstimmt.
Spezifikationen
| Board-Name | STM32 Selbstbalancierendes Roboter-Treiberboard (Treiber-Erweiterungsboard für selbstbalancierendes Roboterauto) |
| Board-Modellkennzeichnung | Yahboom YB-EST01-V2.0 |
| MCU | STM32F103RCT6 |
| Kern | Cortex M3 R1P1 |
| GPIO-Anzahl | 51 |
| Timer | 8 |
| Interner Flash | 256KB |
| SRAM | 48KB |
| Schnittstellenressourcen | 2 x SPI, 3 x USART, 2 x I2C, 2 x I2S, 1 x CAN, 51 x I/O, 2 x DAC |
| Spannungsbereich | Externe Spannung: 2,0-3,6V; Kernspannung: 1.8V |
| Pin-Paket | LQFP64 |
| Programmierung/Download | Typ-C; CH340K-Serienport-Download-Schaltung |
| Eingangsspannung | 8V-13V |
| Kompilierungswerkzeug | KEIL MDK, STM32CubeMX |
Anwendungen
- STM32 Selbstbalancierender Roboterwagen Entwicklung und Balancekontrollprojekte
- Roboterwagen-Linienverfolgung (einschließlich elektromagnetischer Linienverfolgung und 4-Kanal-Verfolgungssensormodule)
- Ultraschall-Abstandsmessung/-Verfolgung/-Hindernisvermeidung-Erweiterungen
- OLED-Datenanzeige und Echtzeit-Debugging
- K210 Vision-Modul-Erweiterungen (visuelle Linienverfolgung, Farbverfolgung, Bildcode-Steuerung)
Für Hilfe bei der Produktauswahl und After-Sales-Support kontaktieren Sie https://rcdrone.top/ oder senden Sie eine E-Mail an [email protected].
Details

Bauen Sie ein selbstbalancierendes Roboterauto und erweitern Sie es mit beliebten Sensoren und Steuerungsmodulen, während Ihr Projekt wächst.

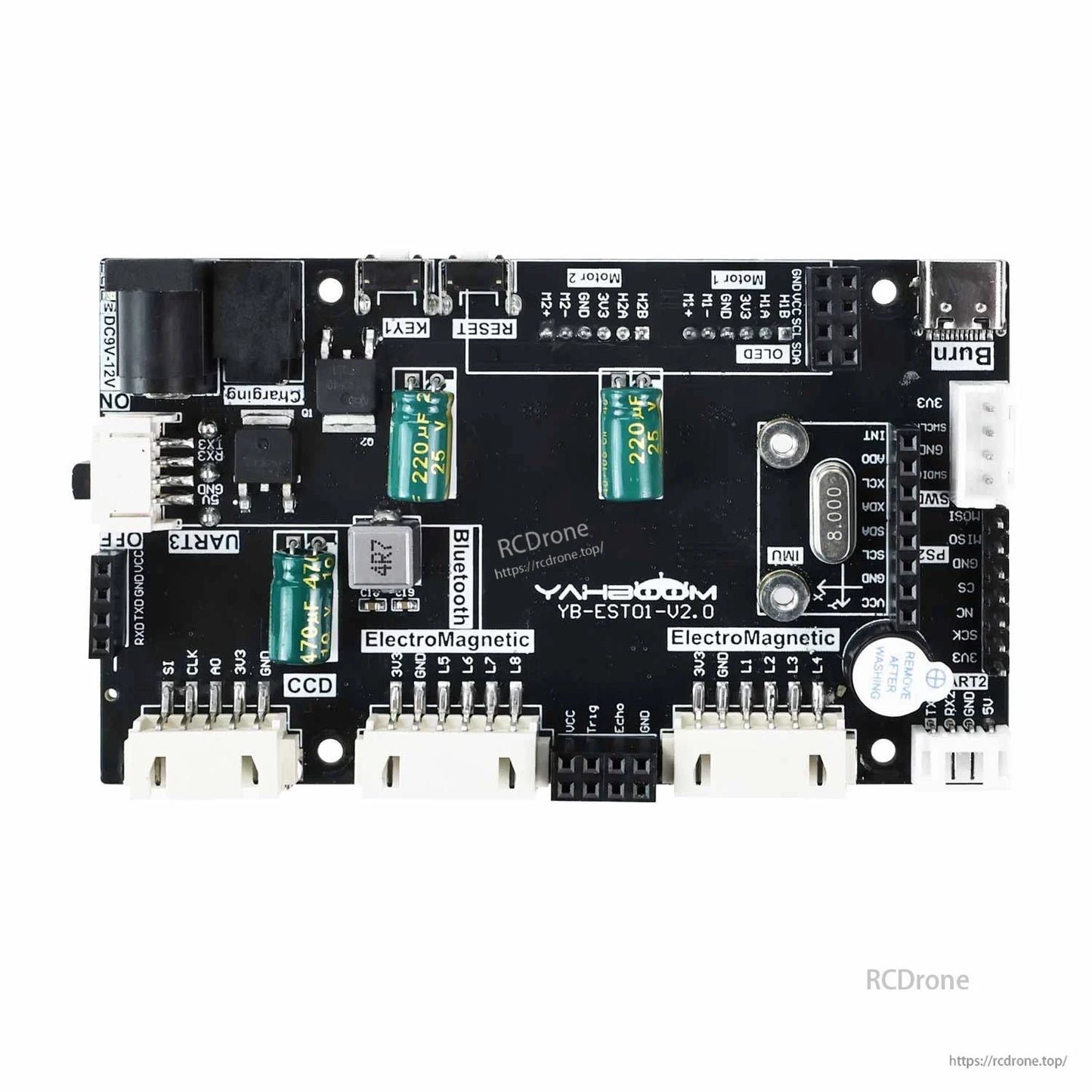
Der YB-EST01-V2.0 integriert den STM32F103RCT6-Controller mit Motorantrieb und speziellen Erweiterungsschnittstellen für Roboterprojekte.

Ein an Bord befindlicher STM32F103RCT6-MCU bietet den Balance-Kontrollkern und lässt viele Schnittstellen für Erweiterungen frei.

Die Spannungsüberwachung an Bord ermöglicht es Ihnen, die Batteriespannung des Roboters in Echtzeit über die unterstützte Bluetooth-App zu überwachen.
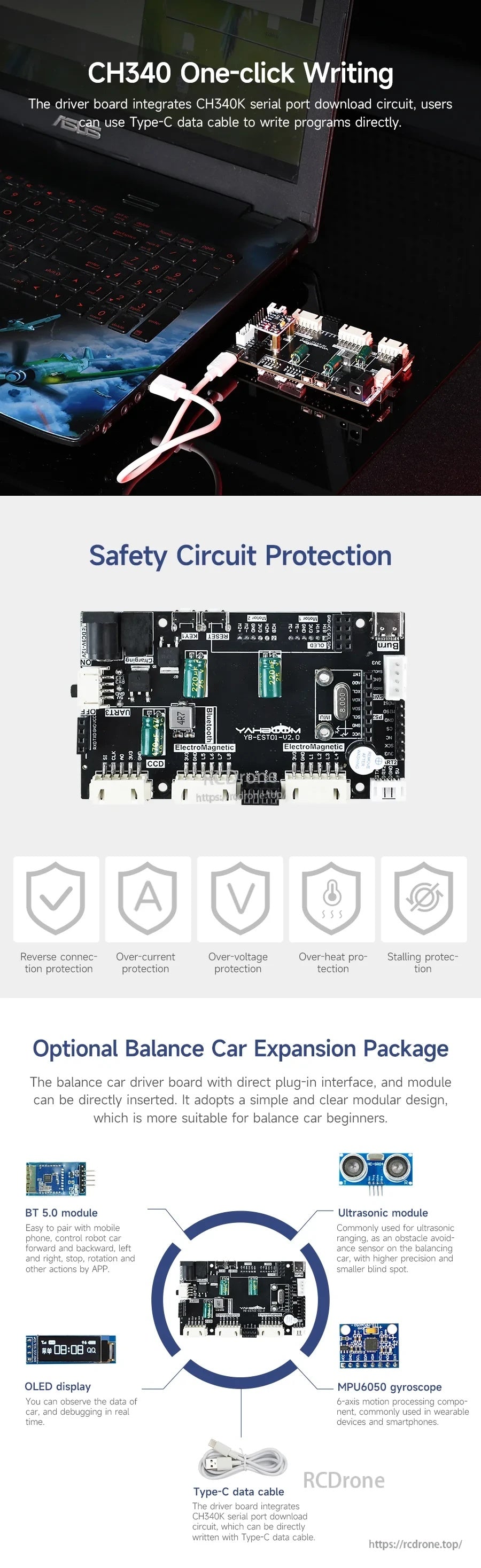
Die Programmierung über Type-C mit dem integrierten CH340K vereinfacht das Herunterladen von Firmware, mit eingebautem Schaltungsschutz für sicherere Tests.
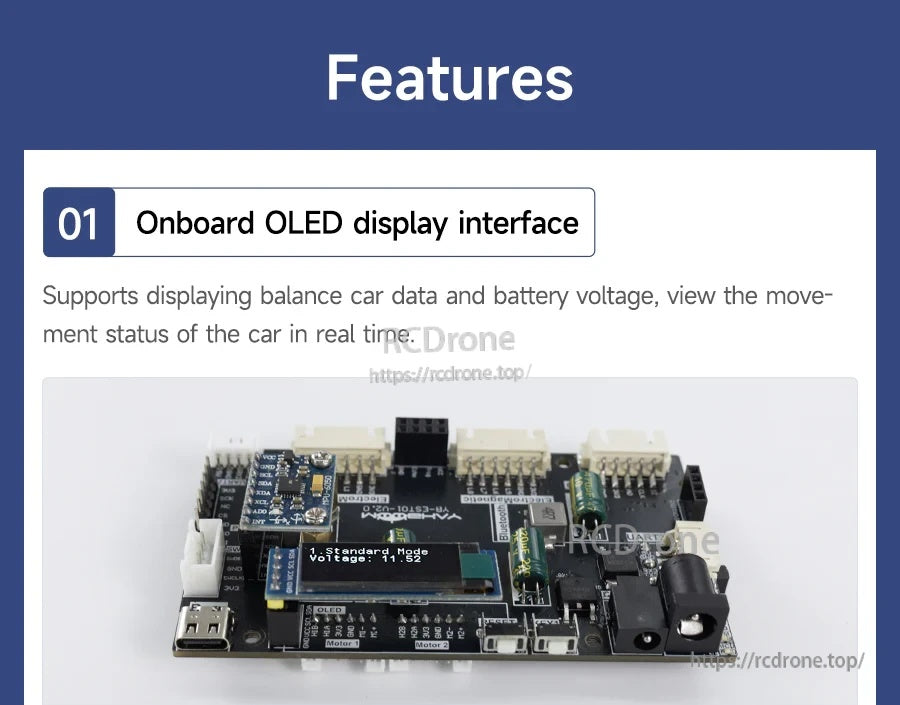
Schließen Sie ein OLED-Display an, um Balancendaten und Batteriespannung während der Abstimmung und Laufzeit anzuzeigen.

Die Unterstützung des Bluetooth-Moduls ermöglicht die Fernsteuerung, die Anzeige von Wellenformen und die Echtzeit-Anpassung der PID-Parameter in der App.

Fügen Sie ein Ultraschallmodul für Reichweitenmessung, Folgeverhalten und Hindernisvermeidungsexperimente hinzu.

Die MPU6050-Schnittstelle unterstützt eine einfache IMU-Erweiterung für Bewegungserkennung in Balanceprojekten.

Der Dual-Channel-Encoder-Motorantrieb unterstützt das Lesen von Encoder-Rückmeldungen und die Überwachung der Motorgeschwindigkeit für eine stabile Balancekontrolle.

Ein 4-Kanal-Tracking-Sensor kann für Linienverfolgung und komplexere Streckenszenarien wie Kurven und Kreuzungen angeschlossen werden.


Eine PS2-Handle-Empfängerschnittstelle ist für die Handfernbedienung während Demos und Tests verfügbar.


Verwenden Sie die K210-Visualmodul-Schnittstelle für AI-Visions-Erweiterungen wie visuelle Linienverfolgung, Farbverfolgung und Code-Steuerung.

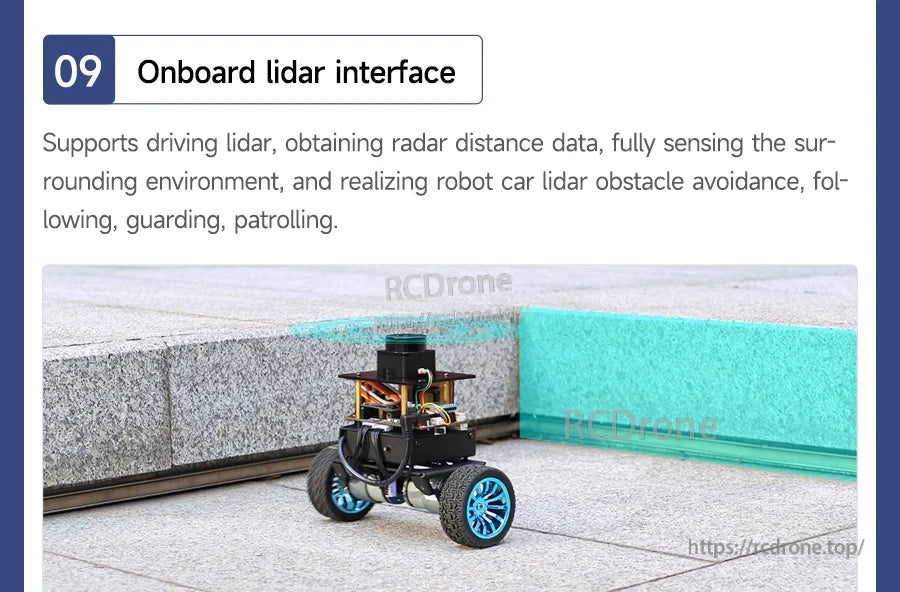
Eine dedizierte Lidar-Kommunikationsschnittstelle unterstützt die Erfassung von Entfernungsdaten für Hindernisvermeidung und Navigationsverhalten.


Die Yahboom YB-EST01-V2.0 Erweiterungsplatine bietet mehrere Peripherieschnittstellen zum Anschließen von Motoren, Encodern, OLED, Bluetooth und gängigen Sensormodulen beim Bau eines selbstbalancierenden Roboterautos.
Ein Chassis-Kit für selbstbalancierende Roboterautos enthält Montageplatten, zwei Motoren mit Rädern, Abstandshalter und diverses Montagezubehör.
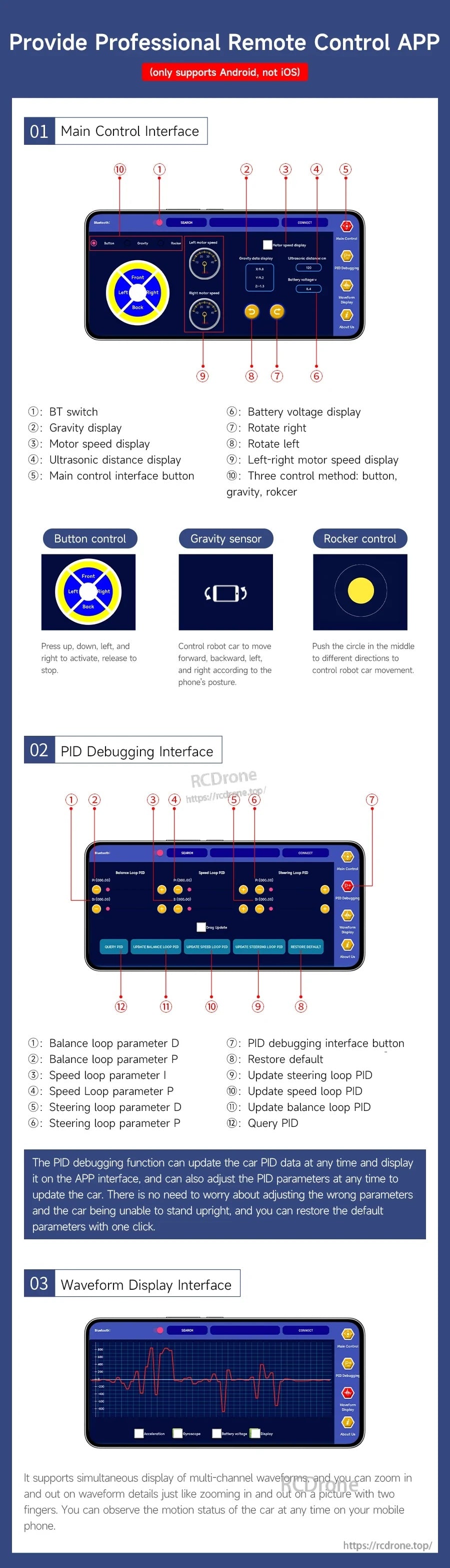
Die Yahboom YB-EST01-V2.0 Treiber-Erweiterungsplatine kombiniert eine Hauptsteuerungsschnittstelle mit PC-Debugging und Wellenformanzeige-Verbindungen für Einrichtung und Feinabstimmung.
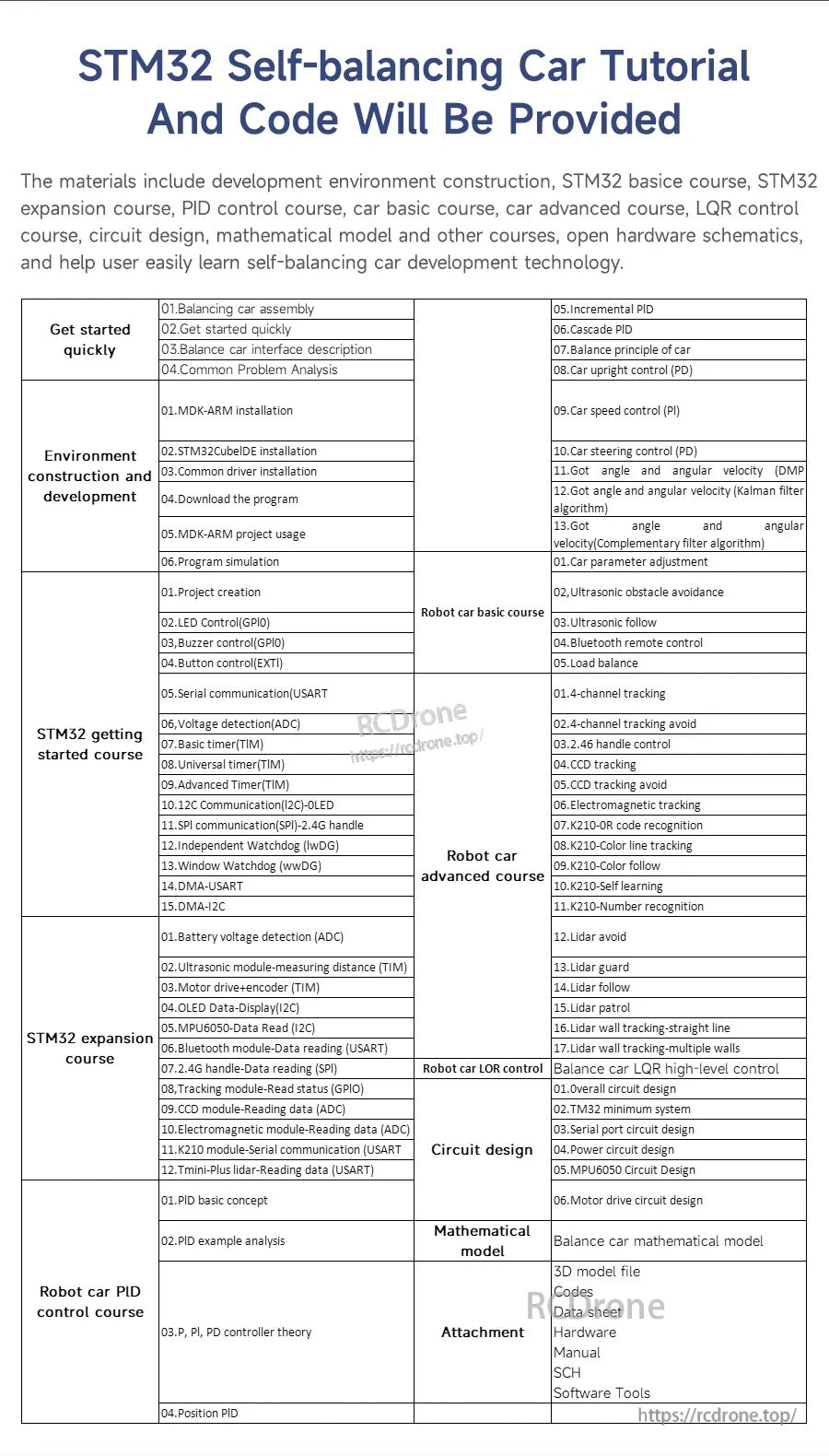
STM32-Tutorialmaterialien und Code für selbstbalancierende Autos sind enthalten, mit Kursabschnitten zu Einrichtung, Erweiterungsmodulen und PID/LQR-Steuerung.

Yahbooms herunterladbare Kursordner bieten STM32-Erweiterungslektionen und Ressourcen zur PID-Steuerung von Roboterautos für Einrichtung und Feinabstimmung.
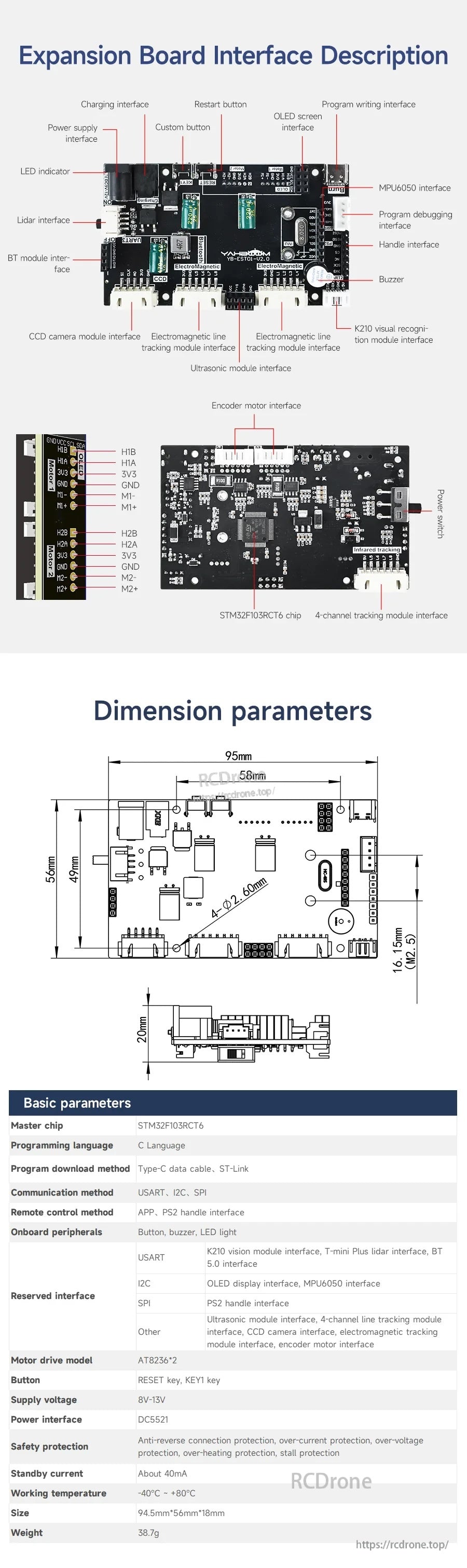
Deutlich gekennzeichnete Header und eine USB‑C-Verbindung vereinfachen die Verkabelung und Programmierung auf der STM32-Treiber-Erweiterungsplatine.

Die YB-EST01-V2.0-Treiber-Erweiterungsplatine wird in einer selbstbalancierenden Roboterwagenplattform mit einem Vier-Rad-Chassis, einer oberen Montageplatte und einem vorderen Ultraschallsensor verwendet.
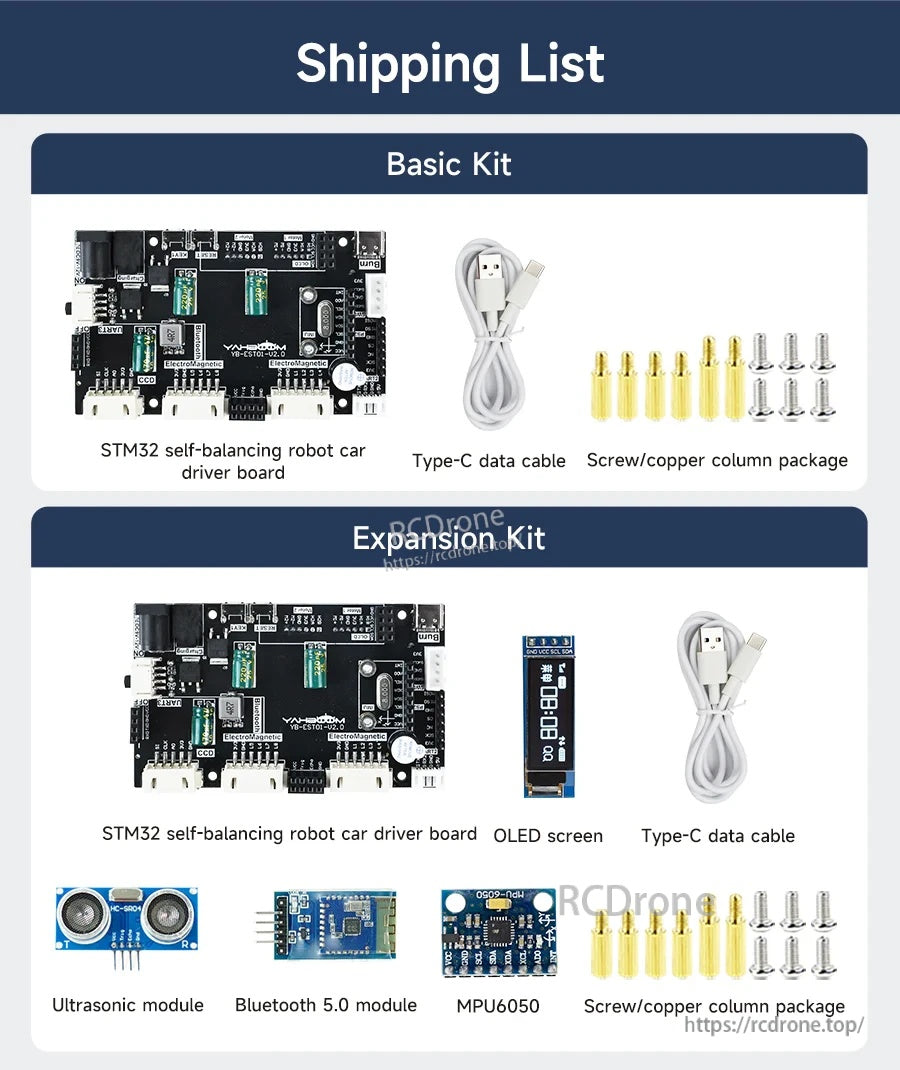
Das Kit enthält die STM32-Treiberplatine für selbstbalancierende Roboterwagen mit einem Typ‑C-Datenkabel und Schrauben/Kupferabstandshaltern, mit einer Erweiterungsoption, die ein OLED, einen Ultraschallsensor, ein Bluetooth-Modul und eine MPU6050-Platine hinzufügt.
Related Collections