Placa receptora ZED-F9P-01B-01 RTK GNSS, USB-C, UART2 RTCM3, SMA & U.FL Antena, Pixhawk GH1.25-6P
Placa receptora ZED-F9P-01B-01 RTK GNSS, USB-C, UART2 RTCM3, SMA & U.FL Antena, Pixhawk GH1.25-6P
RCDrone
No se pudo cargar la disponibilidad de retiro
Resumen
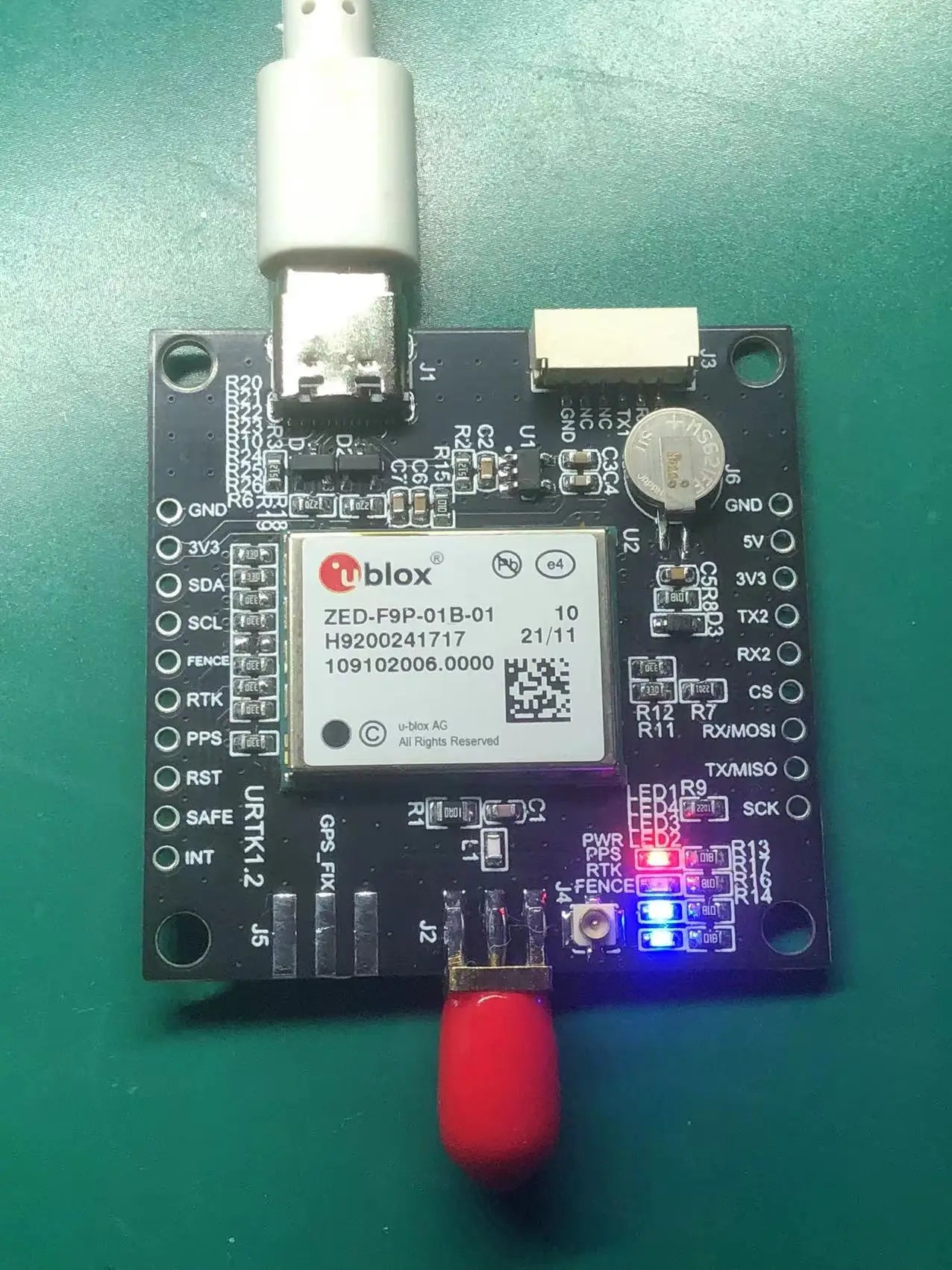
Esta placa receptora GNSS se basa en el módulo u-blox ZED-F9P-01B-01 y proporciona soporte de posicionamiento diferencial RTK con USB-C, pines UART/SPI y opciones de conector de antena dual para integración en sistemas de robótica, piloto automático y navegación.
Características clave
- Interfaz USB: Conexión USB Tipo-C para configuración con u-center y visualización rápida de oraciones NMEA; se enumera como un puerto COM serial independiente de la interfaz UART.
- Opciones de alimentación: Regulador de 3.3V a bordo convierte 5V USB a 3.3V requerido por el módulo; soporta entrada externa de 5V o alimentación directa de 3.3V.
- Recomendación de bajo ruido de 3.3V: Al suministrar 3.3V directamente, se recomienda una fuente limpia con ruido mínimo (menos de 50mV de ondulación PVP se indica como ideal para posicionamiento preciso).
- Compartición UART/SPI: Los pines seriales clásicos están disponibles pero compartidos con pines SPI; por defecto, los pines UART están habilitados.El jumper DSEL en la parte posterior de la placa debe estar abierto.
- Manejo de RTCM3 en UART2: Un segundo puerto serie (UART2) se utiliza principalmente para datos de corrección RTCM3; por defecto, recibe y analiza automáticamente el RTCM3 entrante para habilitar el modo RTK. En modo de estación base, UART2 emite datos de corrección RTCM3.
- Conector de piloto automático: GH1.25-6P (estándar Pixhawk JST-GH) para conectar a un piloto automático Pixhawk y/o alimentar la placa.
- Conectores de antena: Se proporcionan dos interfaces de antena: SMA (tornillo externo, agujero interno) y U.FL (IPEX); cualquiera de los dos se puede utilizar.
- LEDs de estado: Cuatro LEDs de estado (Power, PPS, RTK, FENCE) para la indicación del sistema/RTK/geofencing.
Especificaciones
| Módulo GNSS (etiqueta del módulo) | u-blox ZED-F9P-01B-01 |
| Marcado de la placa (visible en la foto de la placa) | ZED-F9P-01B-00 |
| USB | USB Tipo-C; se enumera como puerto COM serie (independiente de UART) |
| Serie / SPI | Pines UART compartidos con pines SPI; UART habilitado por defecto; el jumper DSEL en la parte posterior debe estar abierto |
| Dirección del pin UART (compartido con SPI) | TX/MISO = salida del ZED-F9P; RX/MOSI = RX en el ZED-F9P |
| Segundo puerto serie | UART2 (principalmente para datos de corrección RTCM3; puede emitir RTCM3 en modo estación base) |
| Regulación de energía | Regulador de 3.3V proporcionado para regular 5V USB a 3.3V requerido por el módulo |
| Opciones de entrada de energía (indicadas) | USB 5V, externo 5V, o alimentación directa de 3.3V |
| Nota de ruido de suministro de 3.3V (indicada) | Menos de 50mV de rizado PVP se indica como ideal al suministrar 3.3V directamente |
| Capacidad del regulador de 3.3V (indicada) | 600mA de entrada de 5V |
| Capacidad de energía USB-C (indicada) | Capaz de entregar 2A |
| Puerto J3 | GH1.25-6P (estándar Pixhawk JST-GH) |
| Pinout J3 (estándar Pixhawk) | 1: 5V_IN; 2: ZED-F9P UART1 recepción (nivel 3.3V); 3: ZED-F9P UART1 TX (nivel 3.3V); 4,5: No conectado; 6: Tierra |
| Indicadores LED (descritos) | Poder (rojo cuando 3.3V activo a través de USB o bus Qwiic); PPS (amarillo, una vez por segundo después del bloqueo de posición); RTK (azul: encendido después de la alimentación, parpadea después de recibir datos RTCM, se apaga después de la fijación RTK); FENCE (configurable para aplicaciones de geovallado) |
| Interfaces de antena | SMA y U.FL (IPEX); cualquiera de las interfaces es aceptable |
| Etiquetas de encabezado (serigrafía, lado izquierdo) | GND, 3V3, SDA, SCL, FENCE, RTK, PPS, RST, SAFE, INT |
| Etiquetas de encabezado (serigrafía, lado derecho) | GND, 5V, 3V3, TX2, RX2, CS, RX/MOSI, TX/MISO, SCK |
Aplicaciones
- Posicionamiento RTK GNSS para drones, UGVs, robótica y prototipos de navegación
- Integración GNSS de Pixhawk/autopiloto a través de JST-GH (GH1.25-6P) conexión en serie
- Configuraciones RTK basadas en RTCM3 utilizando UART2 para enlaces de datos de corrección (radio o cableado)
Para preguntas de compatibilidad (selección de UART/SPI, cableado RTCM3, antenas o integración), comuníquese con soporte en https://rcdrone.top/ o envíe un correo electrónico a [email protected].
Detalles

La placa receptora ZED-F9P combina una conexión USB-C con pines de E/S claramente etiquetados y un U.FL conector de antena para una integración sencilla.
La interfaz USB‑C conecta el ZED‑F9P a u‑center o a una Raspberry Pi como un puerto COM serial independiente, con regulación de 3.3V a partir de la alimentación USB de 5V.
La placa ZED-F9P utiliza pines compartidos de UART/SPI y un segundo puerto serial (UART2) que se utiliza comúnmente para datos de corrección RTCM3 para habilitar el modo RTK.
El pinout del conector J3 GH1.25-6P Pixhawk lista 5V_IN, UART1 RX/TX (3.3V nivel), y tierra, y la placa utiliza cuatro LED de estado para energía, bloqueo de PPS y actividad RTK/RTCM.
La placa receptora GNSS RTK ZED-F9P proporciona dos opciones de interfaz de antena—SMA y U.FL (IPEX)—para una instalación flexible.
Related Collections