Hemos probado la radiotelemetría y podemos conectarnos normalmente. Hemos subido el firmware. Por favor no cargue el firmware. Un firmware diferente hará que el firmware sea incompatible. Por favor no modifique los parámetros. Es posible que los parámetros incorrectos no funcionen.
La telemetría Wifi se puede utilizar para el controlador de vuelo PIXHAWK o APM, es lo mismo que la radiotelemetría 3DR.
La telemetría wifi para APM se utiliza para el controlador de vuelo APM.
La telemetría wifi para pixhawk se utiliza para pixhawk 2.4.8
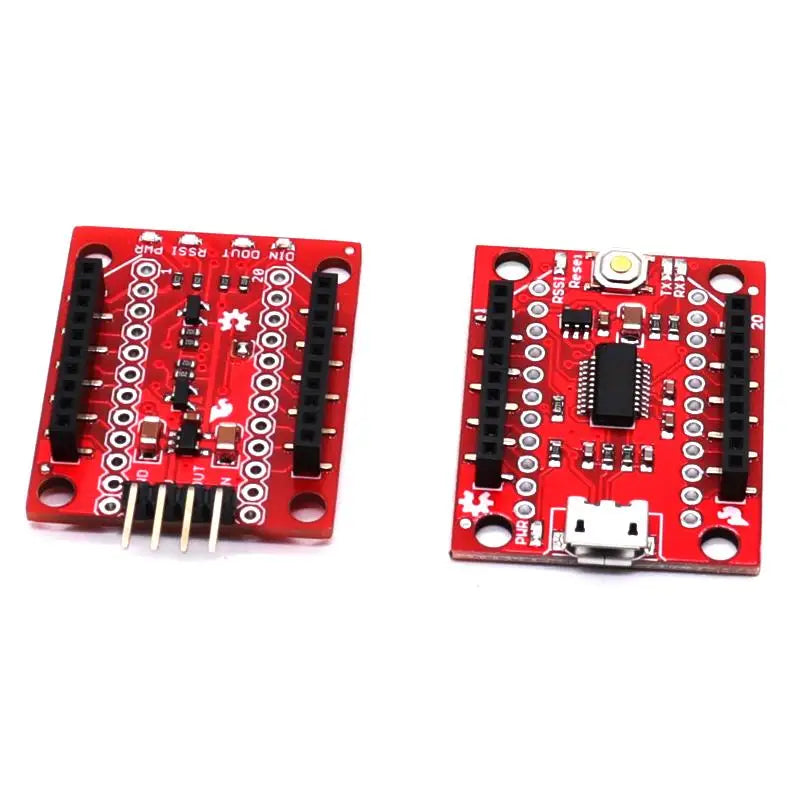
La telemetría de radio V5 es un nuevo tipo. Cualquiera de los dos se puede utilizar como terminal terrestre o aérea
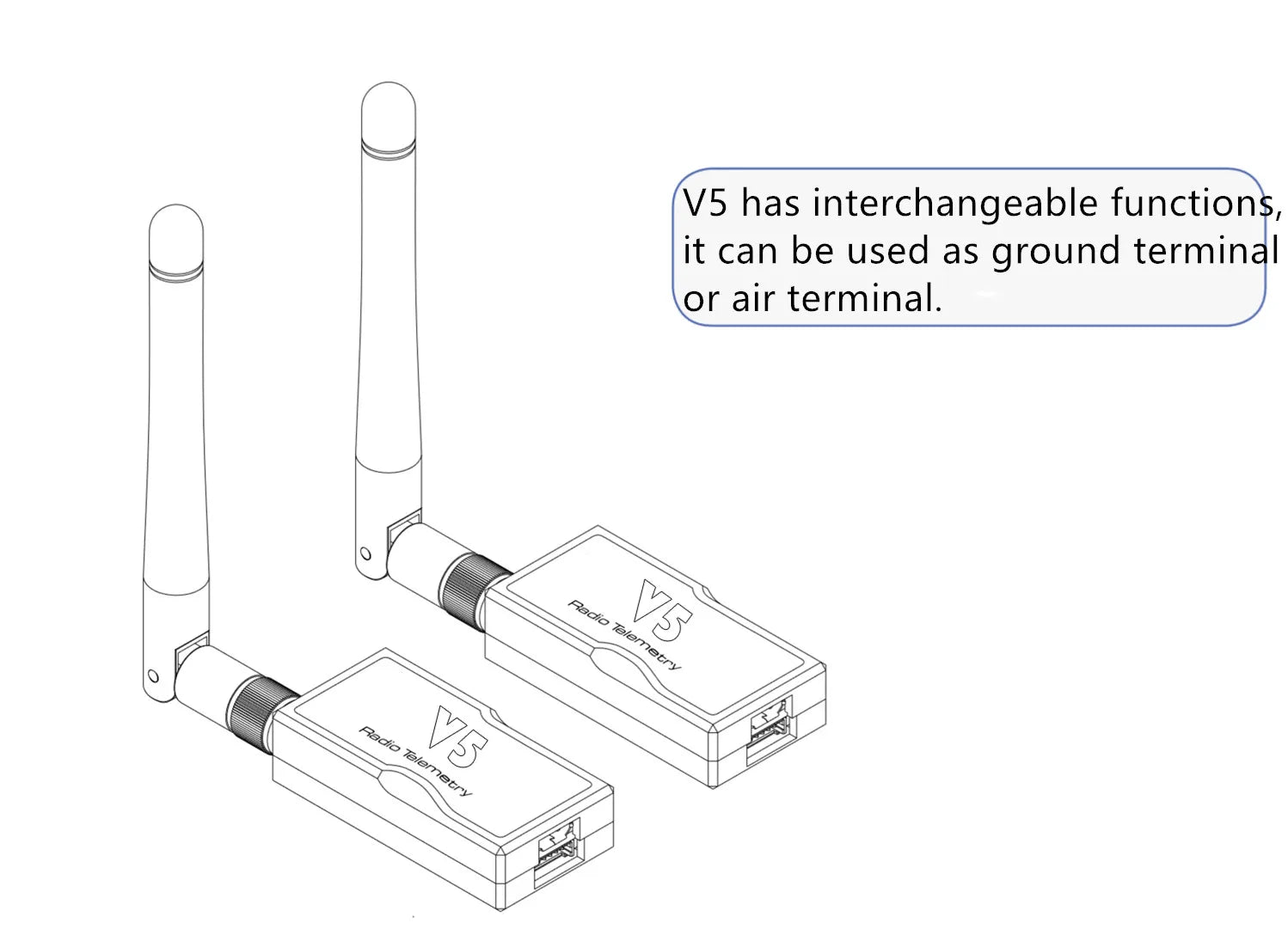
V5 tiene funciones intercambiables, puede usarse como terminal terrestre o terminal aéreo: V5 Radio Talemetry Radio Tale
![3DR Radio V5 Telemetry, [4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/Se888e7b6abd54def8a6cc8819de18cf6Q.webp?v=1714815991)
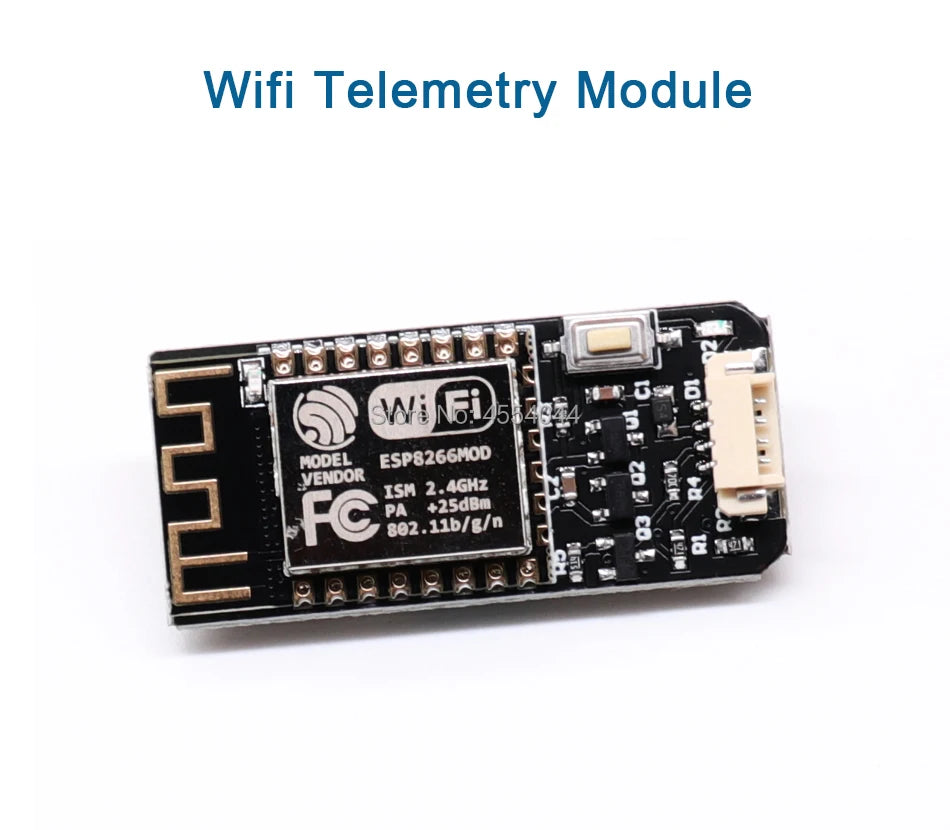
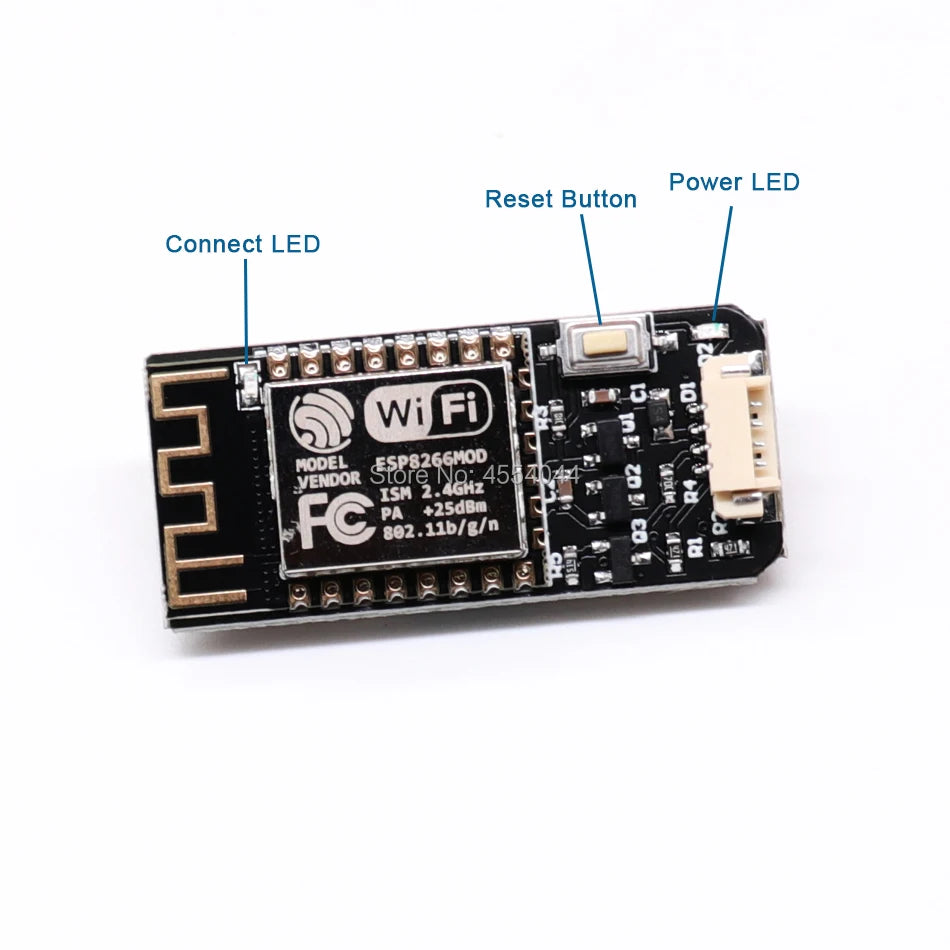
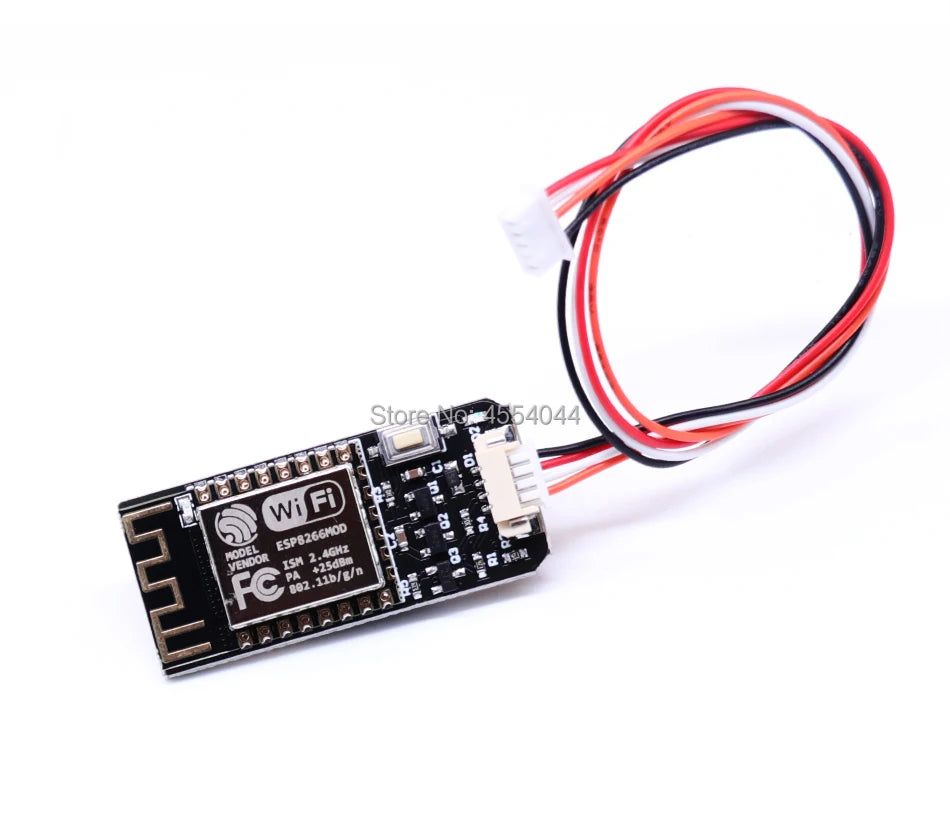
Módulo de Telemetría WiFi para 2.4GHz, con módulo ESP8266, soporta protocolo ISM, con una velocidad de transmisión de datos de 6Pa (#z5d0m), compatible con las versiones de firmware 802.11b/e/0.8.



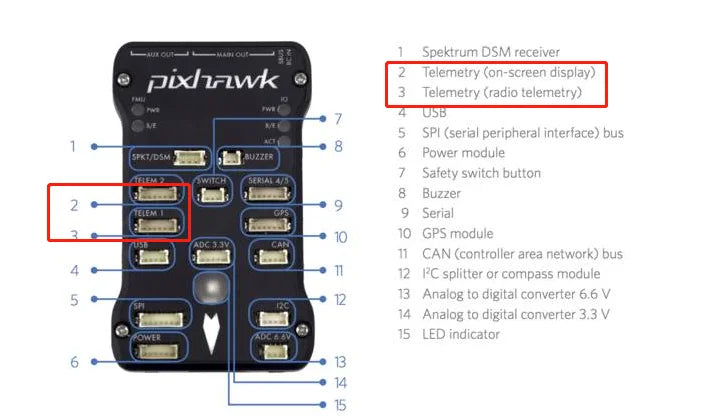
¿Cómo utilizar la radiotelemetría para el controlador de vuelo PIXHAWK?
1.Utilice la línea 6P para conectarse al controlador de vuelo pixhawk.
Debido a los diferentes firmware, algunos firmware pueden usar dos puertos, algunos firmware solo pueden usar uno de los puertos. Así que busque uno de los puertos disponibles para la conexión.
SI usa el firmware PX4, solo se puede usar TELEM1, no se puede usar TELEM2.
SI usa firmware ardupilot, busque uno de los puertos disponibles para la conexión.
2. Tenga en cuenta:
-
Cuando se utiliza la conexión de radiotelemetría, se debe utilizar el módulo de alimentación 3DR o ESC de 5 V para suministrar energía al control de vuelo. No se puede insertar el USB porque la prioridad del USB es mayor que la radiotelemetría. SiSi el cable USB está enchufado, no se puede utilizar para la transmisión de radiotelemetría.
-
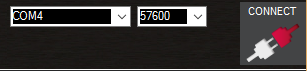
La velocidad en baudios predeterminada de la radiotelemetría es 57600, no 115200. Seleccione el puerto COM correcto y no seleccione AUTO.
-
Si hay un problema con el controlador, descárguelo desde aquí:pix.rctoysky.com/CP210x_VCP_Windows.rar