Controlador de vuelo autopiloto industrial BOYING DRACO Series – Sistema modular compatible con PX4 para drones multirrotor con GNSS, RTK, CAN Bus, receptor S.BUS y opciones de energía integradas
Controlador de vuelo autopiloto industrial BOYING DRACO Series – Sistema modular compatible con PX4 para drones multirrotor con GNSS, RTK, CAN Bus, receptor S.BUS y opciones de energía integradas
BOYING
No se pudo cargar la disponibilidad de retiro
Resumen
La Serie BOYING DRACO es un conjunto integral de controladores de vuelo de piloto automático industriales diseñados para una amplia gama de aplicaciones de UAV, desde drones de mapeo compactos hasta plataformas de carga pesada a gran escala. Totalmente compatible con el firmware de código abierto PX4, la serie DRACO ofrece una versatilidad, precisión y fiabilidad excepcionales, soportando tanto configuraciones multirrotor estándar como avanzadas.
Desde módulos de potencia integrados hasta posicionamiento GNSS+RTK sin interrupciones, el ecosistema DRACO permite un despliegue plug-and-play con cableado intuitivo y gestión de interfaz robusta.
Características Clave
-
Entrada de Voltaje: 6S–28S (dependiendo del modelo)
-
Interfaces CAN: Buses CAN simples o dobles
-
Salidas PWM: 8 a 16 dependiendo del modelo
-
Temperatura de Operación: -20°C a 70°C
-
Precisión de Flotación: ±0.5m (horizontal y vertical)
-
Ángulo de Inclinación Máximo: 35°
-
Compatibilidad con Firmware PX4: Soporta tipos de multirrotor, VTOL, helicóptero, barco y coche
-
Plataforma en la Nube: Integrada con BOYING Industrial Bit Data Cloud
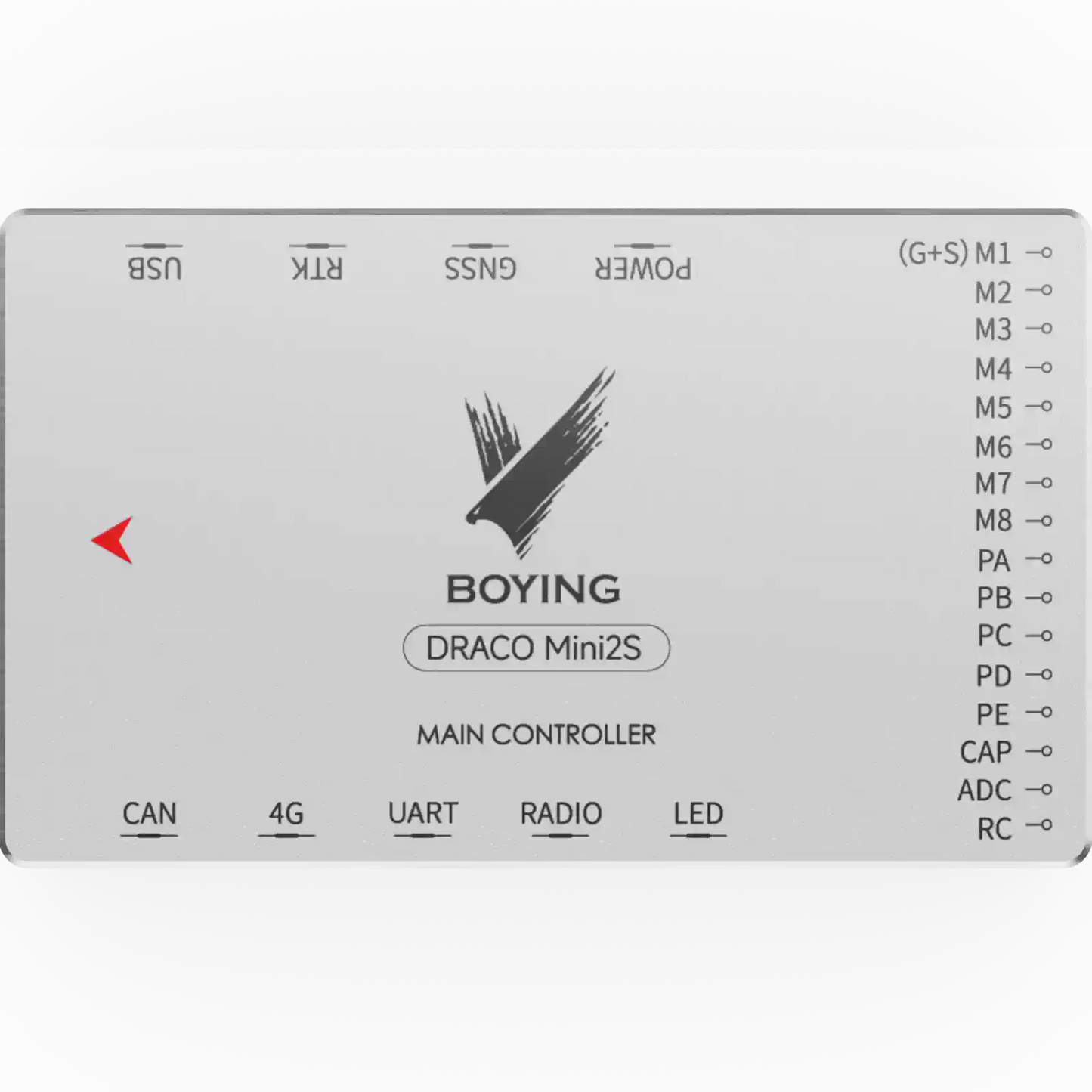
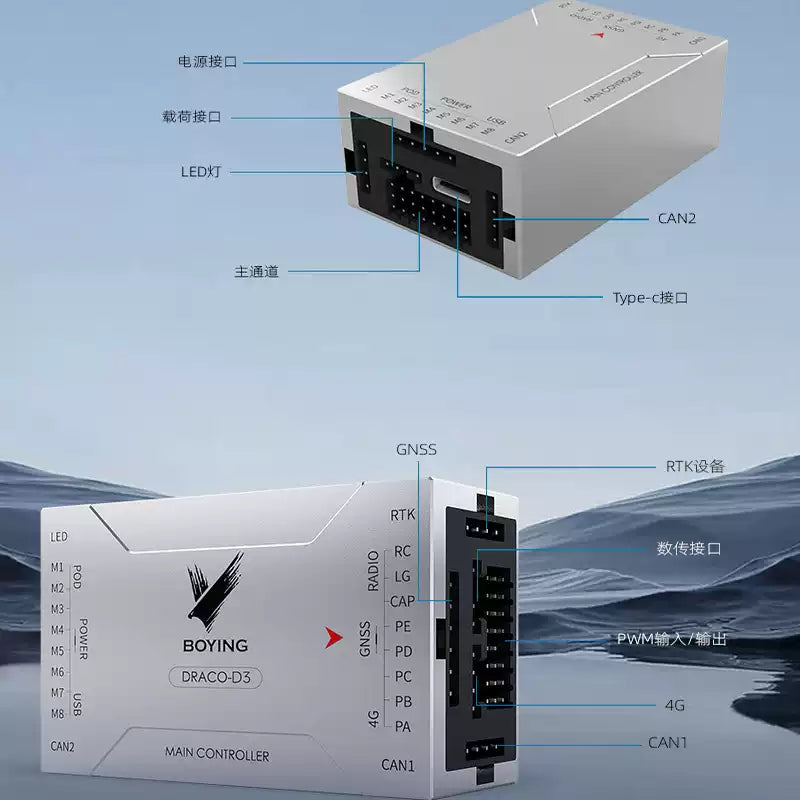
Diseño Modular Avanzado
-
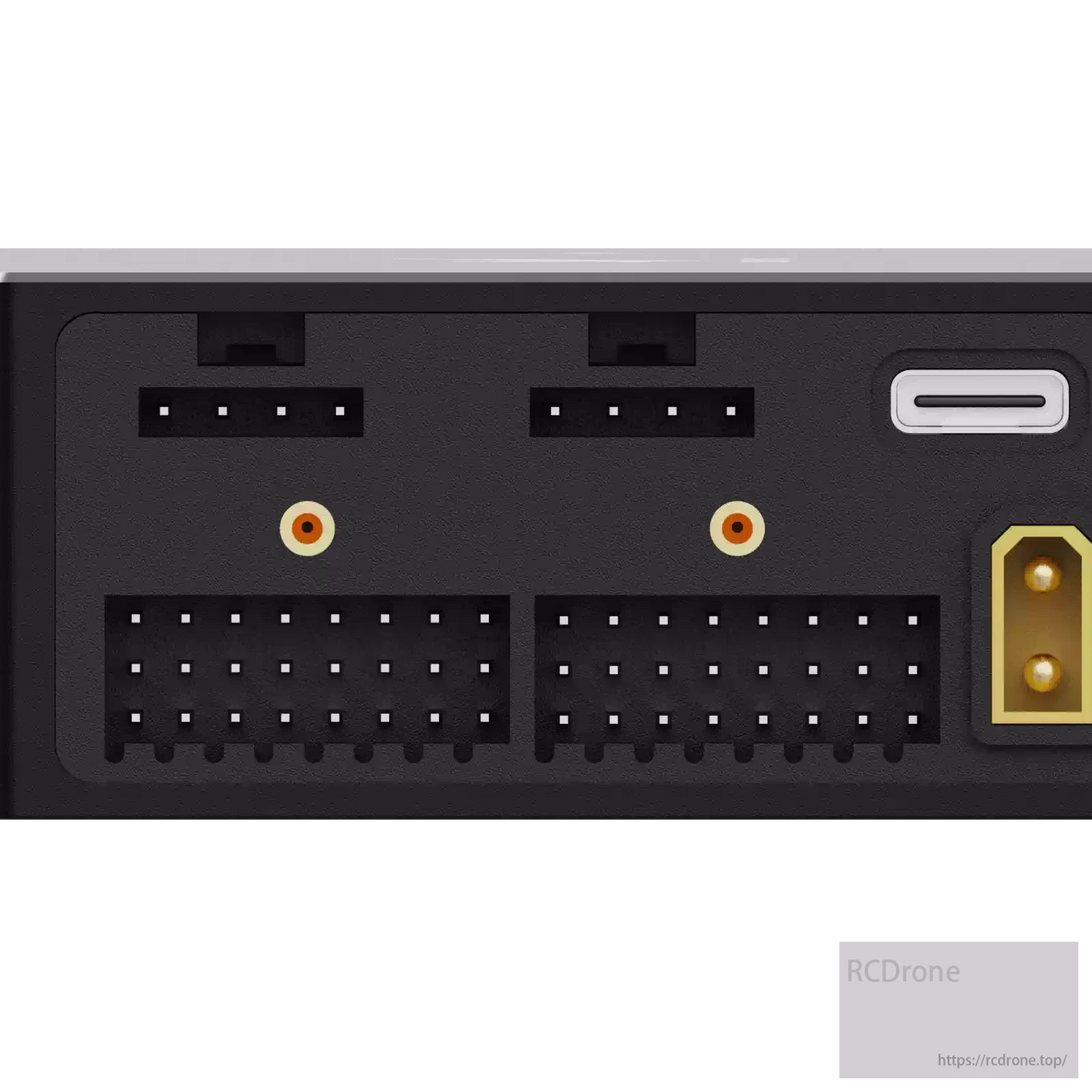
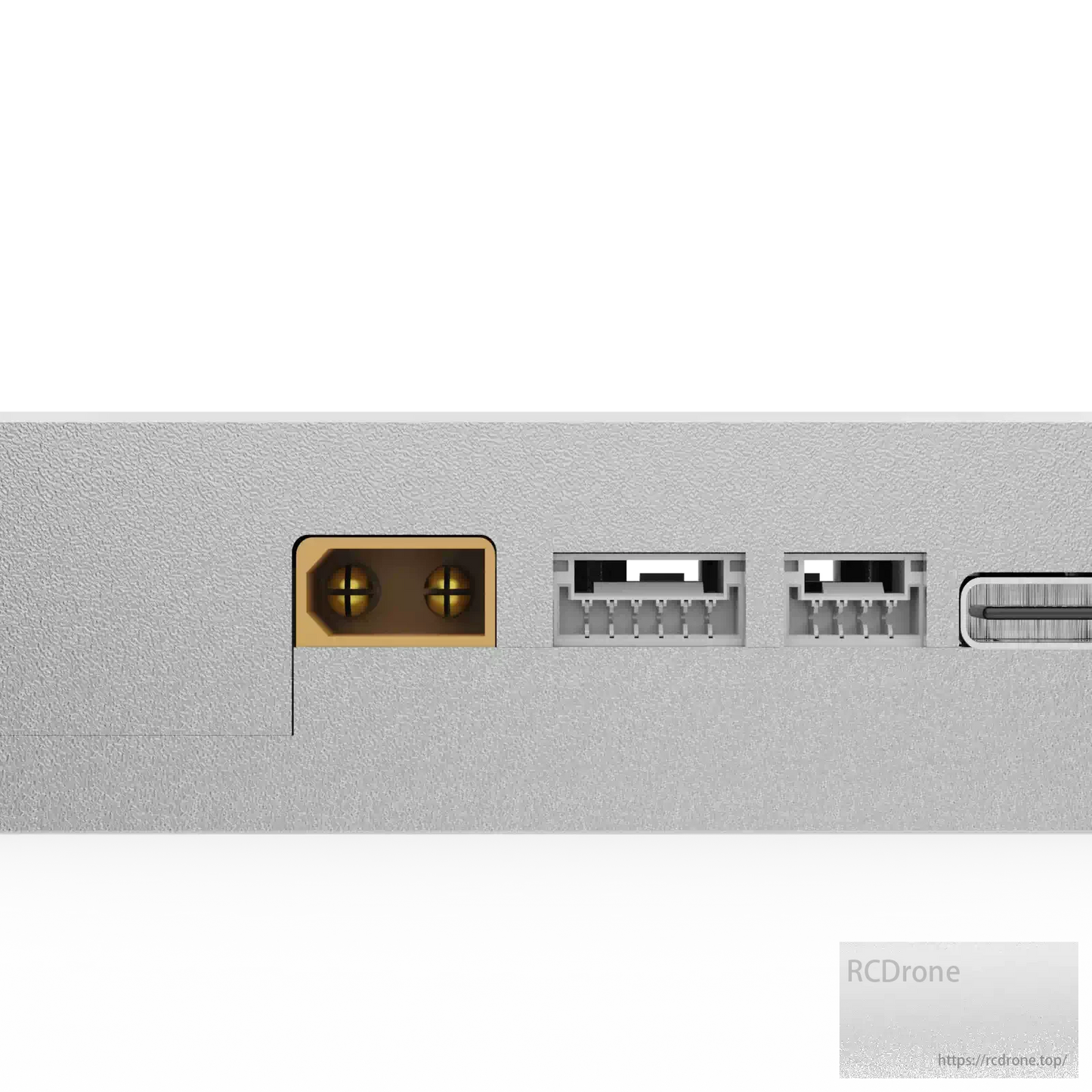
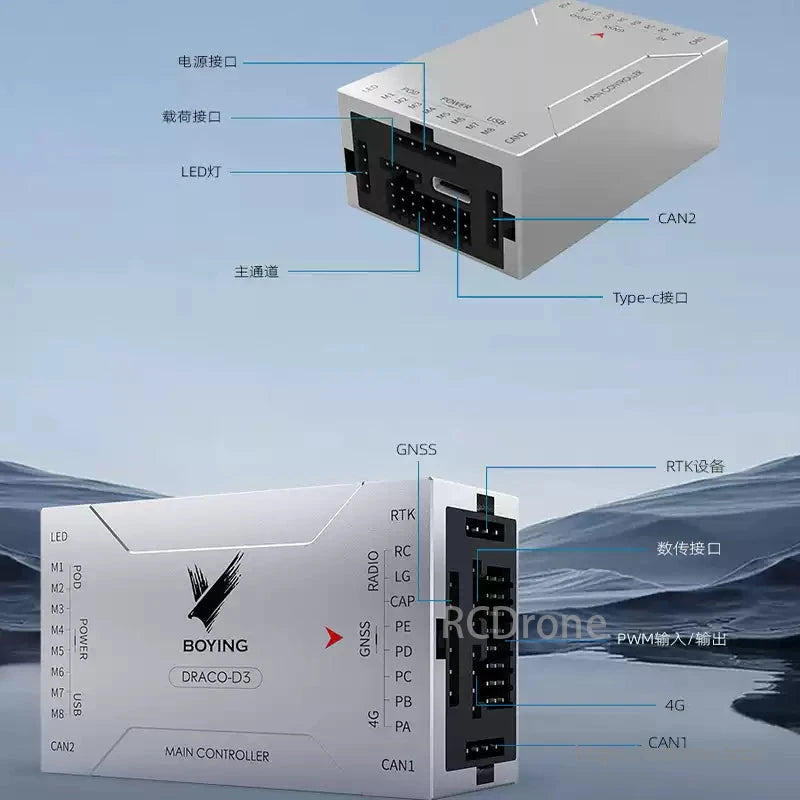
Puertos independientes para todos los módulos, incluyendo GNSS, RTK, entrada de energía, telemetría, LEDs y extensiones CAN
-
Puerto de alimentación XT30 en modelos seleccionados como DRACO MINI2 para conexión directa de batería de 6–14S
-
Diseño de conector anti-inverso para conectores principales y auxiliares simplifica la instalación y elimina errores
Compatibilidad de la Plataforma
Soporta configuraciones de multirrotor en sentido horario, antihorario y asimétrico:
-
X4, +4
-
X6, +6
-
X8, +8
-
Sistemas de hélices coaxiales X4 y 4+4
-
Modelos asimétricos: 3+3, 4+2, 4+4 y más
Expansión del sistema y periféricos
El controlador DRACO admite de forma nativa la integración con:
-
LiDAR omnidireccional de 360°
-
Sistemas de computación a bordo Edge
-
ESCs de alta tensión
-
Entrada/salida de señal PWM
-
S.BUS entrada del receptor
-
Módulos de transmisión de datos 4G
Indicadores de estado LED
El LED integrado proporciona el estado del sistema y retroalimentación de diagnóstico de un vistazo:
| Comportamiento del LED | Indicación |
|---|---|
| Sin luz | Error de LED o actualización de registro |
| Rojo/Blanco parpadeando alternadamente | FC inicializando |
| Rojo/Amarillo/Azul/Verde parpadeando | Sin calibración del dispositivo |
| Rojo/Azul/Verde parpadeando | Calibración/prueba en progreso |
| Amarillo parpadeo lento | Error de RC o protección de bajo voltaje |
| Púrpura sólido | Error de brújula |
| Púrpura parpadeo doble | Error de acelerómetro |
| Púrpura parpadeo rápido | Error de desbloqueo o inicialización incompleta |
| Rojo sólido | Error de memoria de registro |
| Rojo/Amarillo alternando | Fallo de GPS |
| Azul sólido o parpadeando | Sin GPS |
| Verde sólido o parpadeando | GPS bloqueado |
| Verde parpadeando rápido | Bloqueo de GPS de alta precisión |
Controlador remoto S.BUS Mapeo de canales
El sistema de piloto automático DRACO es totalmente compatible con S.BUS receptores.Para transmisores comunes, las asignaciones de canales están preconfiguradas:
| Canal | Función | Notas |
|---|---|---|
| 1 | Rodar | |
| 2 | Inclinación | |
| 3 | Acelerador | |
| 4 | Guiñada | |
| 5 | Modo de Vuelo | Utilizado para el cambio de modo de vuelo y calibración |
| 6 | Aux1 | Canal auxiliar preconfigurado |
| 7 | Regreso a Casa | También utilizado como disparador de seguridad (valor ≥ 975) |
| 8 | Interruptor AB | Habilita la función de ruta AB |
| 9–14 | Auxiliar | Entradas programables opcionales |
Para receptores sin un estado de failsafe claro en el acelerador, el Canal 7 debe configurarse como el disparador de failsafe.
Directrices de instalación del controlador de vuelo
-
Orientación de instalación: Alinear el FC con la dirección del morro de la aeronave; la dirección del módulo GNSS debe coincidir con la orientación del FC
-
Evitar interferencias: Los módulos GNSS y RTK deben posicionarse lejos de dispositivos de alta corriente, fuentes de EMI de alta frecuencia o antenas activas
-
Corrección de posición GPS: DRACO admite corrección de instalación precisa basada en GPS (±1m con 0.01 resolución)
-
Ángulo de actitud máximo: Configurado de fábrica para restringir el cabeceo/rolido inseguro durante el vuelo
Resumen del modelo
| Modelo | Voltaje | Peso | CAN | Tamaño (mm) | Ventaja clave |
|---|---|---|---|---|---|
| DRACO D1 | 6–28S | 159g | 1 | 100×66×25 | UAVs de alta carga, control estable en todas las direcciones |
| DRACO MINI2 | 6–14S | 106g | 1 | 74×44×23 | Poder incorporado, compacto para drones ligeros |
| DRACO D3 | 6–28S | 68g | 1 | 67×44×27 | Ligero, flexibilidad de construcción modular | DRACO SUPER4 | 12–28S | 180g | 2 | 106×62×28 | Buque insignia, autobús Ruta 12, potencia avanzada |
| F7 Abierto | 6–28S | 49g | 2 | 73×48×16 | PX4 de código abierto, 16 PWM, multiplataforma |
Aplicaciones
-
Inspección de líneas eléctricas
-
Topografía y mapeo
-
Aplicación agrícola
-
Rescate de emergencia
-
Sistemas VTOL
-
Embarcaciones no tripuladas o vehículos terrestres
-
Drones de entrega y logística
Related Collections