

















SteadyWin GIM3505-8 Motor de reducción planetaria integrado — Módulo de articulación para robot cuadrúpedo, engranaje 8:1, 24V, CAN, IP54
SteadyWin GIM3505-8 Motor de reducción planetaria integrado — Módulo de articulación para robot cuadrúpedo, engranaje 8:1, 24V, CAN, IP54
SteadyWin
No se pudo cargar la disponibilidad de retiro
Resumen
El módulo de articulación del robot cuadrúpedo SteadyWin GIM3505-8 con motor de reducción planetaria integrado está diseñado para juntas robóticas compactas y ensamblajes de actuadores. El GIM3505-8 integra un reductor planetario 8:1 con un motor sin escobillas y opciones de controlador a bordo para ofrecer movimiento controlado para robots cuadrúpedos, brazos robóticos, articulaciones humanoides y sistemas mecatrónicos similares.
Características clave
- Sistema de engranajes planetarios avanzado para bajo retroceso y movimiento suave (retroceso del engranaje: 15 arcmin).
- Amplia adaptabilidad de voltaje: voltaje nominal de 24 V con un rango de operación de 12~48 V.
- Alta densidad de par y eficiencia: constante de par 0.52 N·m/A con par nominal 0.65 N·m y par máximo 1.27 N·m.
- Huella compacta: Ø43 × 23.6 mm (sin controlador); Ø43 × 30 mm (con controlador).
- Protecciones de seguridad integradas: sobretemperatura, sobrevoltaje y sobrecarga (protección de triple capa indicada en la literatura del producto).
- Interfaz de comunicación CAN; soporta codificador separado y freno personalizado opcional.
Especificaciones
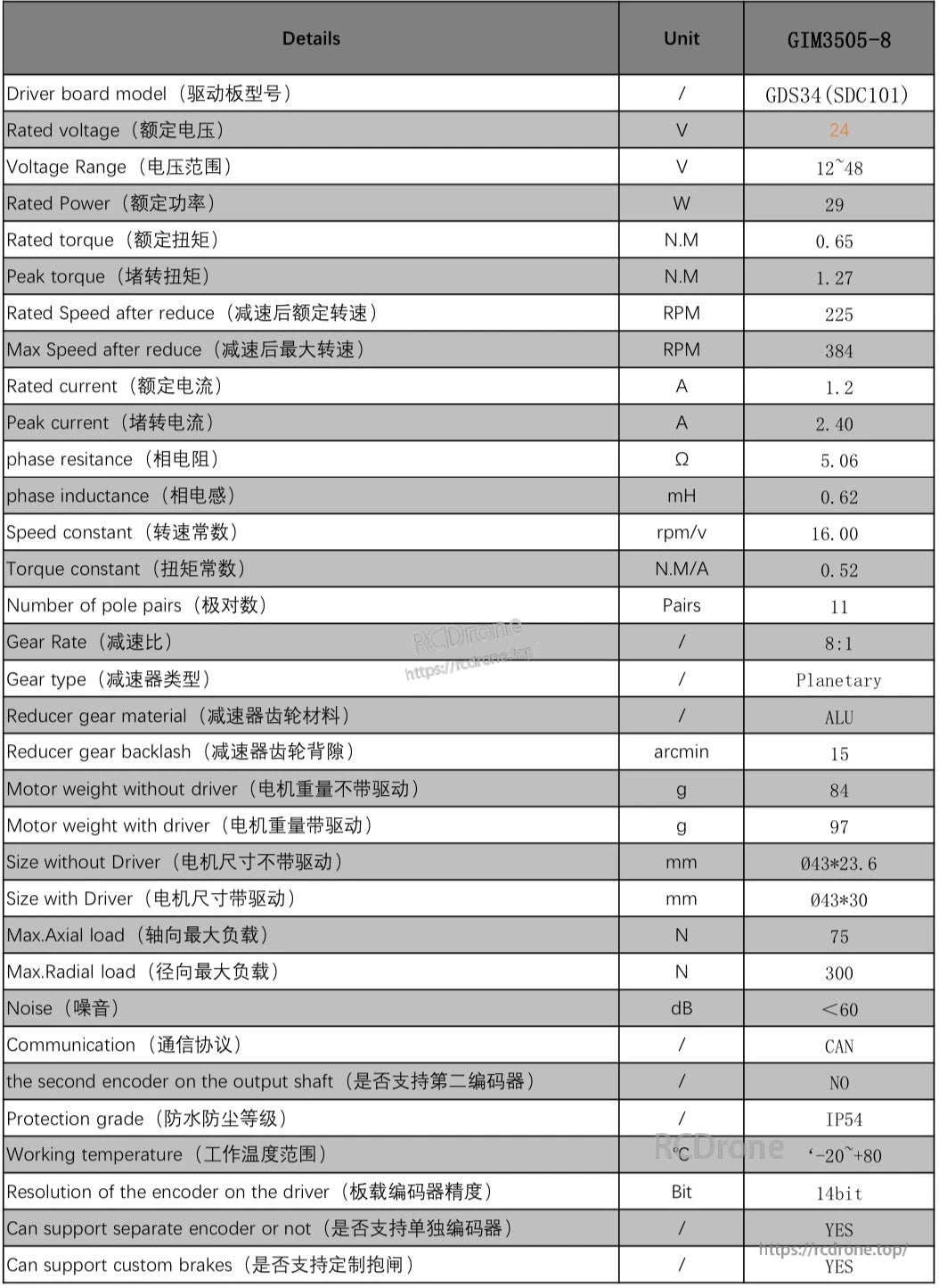
Parámetro Valor ---------------------------------------- -------------------------- Modelo GIM3505-8 Modelo de placa del controlador GDS34 (SDC101) Voltaje nominal 24 V Rango de voltaje 12~48 V Potencia nominal 29 W Par nominal 0.65 N·m Par máximo (de estancamiento) 1.27 N·m Velocidad nominal después de la reducción 225 RPM Velocidad máxima después de la reducción 384 RPM Corriente nominal 1.2 A Corriente máxima (de estancamiento) 2.4 A Resistencia de fase 5.06 Ω Inductancia de fase 0.62 mH Constante de velocidad 16 rpm/V Constante de par 0.52 N·m/A Número de pares de polos 11 pares Relación de engranaje 8:1 Tipo de engranaje Planetario Material del engranaje reductor ALU Retroceso del engranaje reductor 15 arcmin Peso del motor (sin controlador) 84 g Peso del motor (con controlador) 97 g Tamaño (sin controlador) Ø43*23.6 mm Tamaño (con controlador) Ø43*30 mm Carga axial máxima 75 N Carga radial máxima 300 N Ruido <60 dB Comunicación CAN Segundo encoder en el eje de salida NO Grado de protección IP54 Temperatura de funcionamiento -20°C a +80°C Resolución del encoder en el controlador 14 Bit Soporte de encoder separado SÍ Soporte de freno personalizado SÍ
Aplicaciones
- Robots cuadrúpedos (articulaciones y actuadores de las patas)
- Articulaciones de robots humanoides
- Brazos robóticos y manipuladores
- Actuadores de exoesqueletos
- Módulos de dirección y articulación AGV/AMR
- Proyectos de robótica autónoma en investigación y universidades
Para consultas de servicio al cliente y técnicas, contacte [email protected].
Manuales
- GlM3505-8_dibujo_de_instalación.pdf
- GlM3505-8_con_dibujo_de_instalación_del_controlador.pdf
- GIM3505-8.stp
Detalles


SteadyWin especificaciones del conjunto GIM3505-8: 24V, 29W, 0.65N.M de par, engranaje planetario, comunicación CAN, clasificación IP54, soporta frenos personalizados y encoders separados, opera de -20°C a +80°C.
Related Collections

















