




CEREBOTO OpenArm Kit de Brazo Robótico 7DOF – DIY o Preensamblado, Control Open-Source ROS/Python
CEREBOTO OpenArm Kit de Brazo Robótico 7DOF – DIY o Preensamblado, Control Open-Source ROS/Python
CEREBOTO
No se pudo cargar la disponibilidad de retiro
Resumen
El brazo robótico CEREBOTO OpenArm 7DOF es un brazo robótico de grado de investigación, a escala humana, diseñado para universidades, laboratorios, startups y creadores serios. Con 7 grados de libertad, un alcance de brazo de 633 mm, una carga útil típica de 4.1 kg y una carga útil máxima de 6.0 kg por brazo, OpenArm ofrece un movimiento de alta precisión, interacción física segura y herramientas ricas de código abierto.
Puede elegir un kit de hardware DIY para un ensamblaje completo y práctico, o un brazo terminado, calibrado de fábrica y listo para usar. Están disponibles configuraciones de brazo único, brazo dual y brazo cuádruple.
Características clave
-
Brazo robótico a escala humana 7DOF – diseñado para coincidir con una longitud de brazo humano de 160–165 cm para una manipulación y teleoperación natural.
-
Carga útil alta &y estabilidad – carga útil típica de 4.1 kg, carga útil máxima de 6.0 kg por brazo, con un peso de brazo ligero de 5.5 kg.
-
Motores retroalimentables &y estructura compliant – interacción segura y suave para la colaboración humano-robot y tareas controladas por fuerza.
-
Bucle de control CAN-FD de 1 kHz – control en tiempo real y de baja latencia para aplicaciones de investigación de alto rendimiento y de grado industrial.
-
Construcción completamente metálica – estructura principal robusta de aleación de aluminio y acero inoxidable para rigidez y durabilidad.
-
Hardware &y software de código abierto – CAD, PCB, firmware y software de control abiertos para una personalización profunda.
-
Soporte para ROS, Python y C++ – integración oficial de ROS más APIs de Python/C++ para un desarrollo rápido de algoritmos.
-
Rico ecosistema y expansión – soporta manos robóticas hábiles, guantes de captura de movimiento y bases móviles para plataformas robóticas completas.
Especificaciones Técnicas
-
Grados de Libertad: 7 DOF por brazo
-
Alcance del Brazo: 633 mm
-
Carga Útil Típica: 4.1 kg
-
Carga Útil Máxima: 6.0 kg por brazo
-
Peso del Brazo: aprox. 5.5 kg por brazo
-
Materiales: Partes estructurales de aleación de aluminio y acero inoxidable
-
Interfaz de Control: CAN / CAN-FD, UART (a través del adaptador USB2CANFD-X2 incluido en versiones de brazo dual/cuádruple)
-
Frecuencia de Control: hasta 1 kHz bucle CAN-FD
-
Soporte de Software: marco ROS, API de Python, API de C++
-
Ergonomía: longitud del brazo adecuada para usuarios con altura corporal de 160–165 cm
Software &y Ecosistema de Código Abierto
OpenArm es una plataforma de brazo robótico completamente de código abierto.Los recursos oficiales incluyen:
-
Sitio web: openarm.dev
-
Documentación: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
Video tutorial: guía oficial de YouTube para comenzar
Con archivos abiertos de CAD, PCB y firmware, puedes modificar la mecánica, la electrónica y el software de control, o extender el brazo con nuevos sensores y efectores finales para tus propios temas de investigación.
Escenarios de Aplicación Típicos
OpenArm está diseñado como una plataforma de investigación y enseñanza versátil y de alta precisión para:
-
Cursos de robótica en universidades y experimentos de laboratorio
-
Institutos de investigación y proyectos de laboratorio
-
Investigación en aprendizaje por refuerzo y IA basada en física
-
Interacción humano-robot y estudios de robots colaborativos
-
Espacios de creación y equipos de hardware de código abierto
-
Plataformas de educación e formación en ingeniería
Con su tamaño a escala humana y su actuación compliant, OpenArm es ideal para manipulación, teleoperación, aprendizaje por imitación, robótica asistencial y más.
Versiones de Producto &y Configuraciones
Versión 1 – Kit de Hardware DIY
-
Para usuarios con habilidades prácticas sólidas que desean comprender profundamente la estructura mecánica.
-
Incluye todas las partes mecánicas, eléctricas y 3D impresas; usted ensambla y calibra el brazo usted mismo siguiendo el manual.
Versión 2 – Brazo Robótico Terminado
-
Para institutos de investigación, laboratorios, empresas y educadores que necesitan una plataforma lista para usar.
-
Totalmente ensamblado, ajustado y calibrado antes del envío; listo para usar directamente de la caja.
Configuraciones de brazos disponibles (dependiendo de la lista):
-
Kit DIY – Brazo único
-
Brazo terminado – Brazo único
-
Kit DIY – Doble brazo
-
Brazos terminados – Doble brazo
-
Kit DIY – Cuádruple brazo
-
Brazos terminados – Cuádruple brazo
Contenido del paquete
Cada kit OpenArm o sistema terminado incluye típicamente:
-
Componentes estructurales principales de aleación de aluminio y acero inoxidable
-
Motores, placas de control, fuente de alimentación y cables
-
Piezas impresas en 3D y juegos de tornillos
Versiones de doble brazo y cuádruple brazo: un dispositivo USB2CANFD-X2 compatible con BOM oficial (CEREBOTO es el agente autorizado en el país) para comunicación de PC a CAN-FD.
Extensiones de hardware soportadas
OpenArm soporta múltiples complementos de hardware (se venden por separado), lo que te permite construir un sistema robótico completo:
-
Mano robótica hábil – para investigación en manipulación fina y agarre.
-
Conjunto de guantes de captura de movimiento – para teleoperación intuitiva y aprendizaje por imitación.
-
Base móvil – para convertir OpenArm en una plataforma de manipulador móvil.
Preguntas Frecuentes
Q: ¿Se puede usar el brazo robótico de inmediato?
A: La versión del brazo terminado está completamente ajustada y calibrada en la fábrica; solo enciéndelo y comienza a trabajar. El kit de hardware DIY requiere que ensamblen y configuren el sistema siguiendo las instrucciones.
Q: ¿Es OpenArm compatible con ROS u otro middleware?
A: Sí. OpenArm admite oficialmente el marco ROS, y también puedes controlar el brazo a través de APIs de Python y C++.
Q: ¿Para quién es este producto?
A: Investigadores de universidades e institutos, laboratorios de IA &y robótica, cursos de enseñanza, centros de formación en ingeniería y aficionados avanzados.
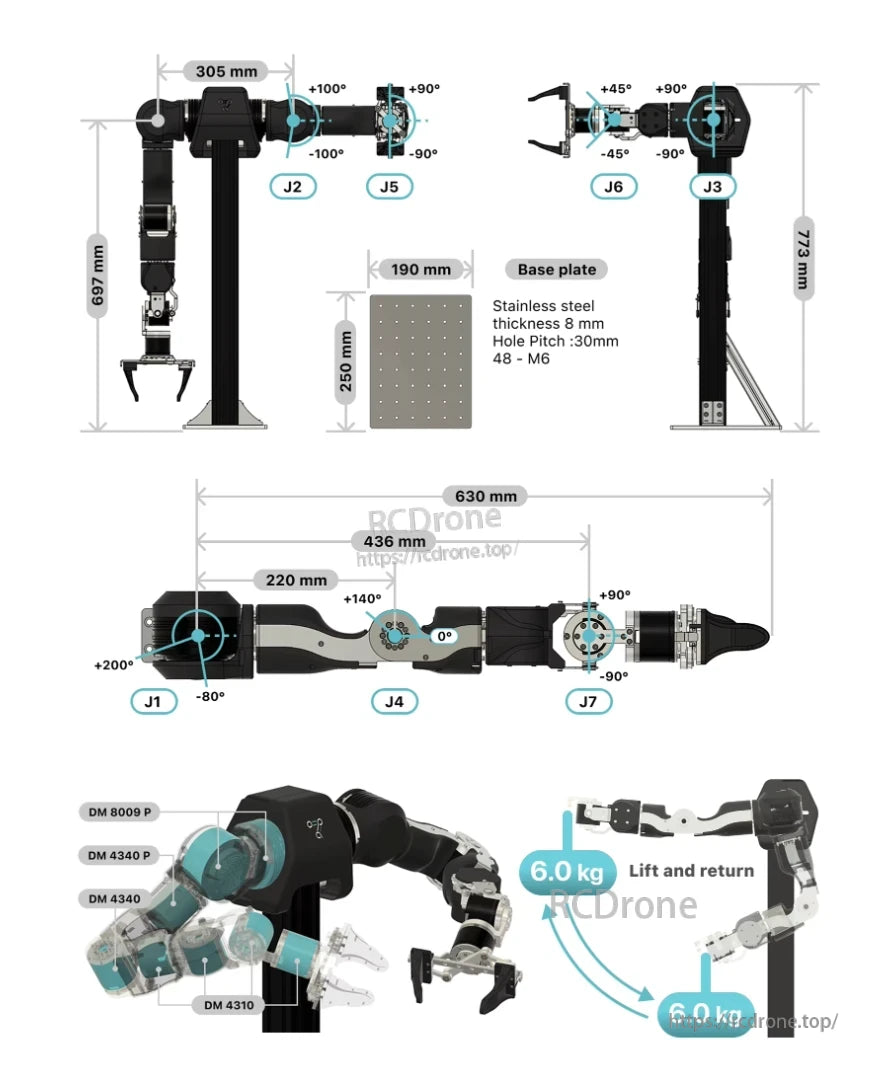
El brazo robótico Cereboto OpenArm 7DOF tiene siete articulaciones (J1–J7) con rangos angulares definidos. Mide 697 mm o 773 mm de altura, alcanza 630 mm y se monta en una placa base de acero inoxidable de 190×250 mm—8 mm de grosor con 48 agujeros M6 espaciados a 30 mm de distancia. Impulsado por motores DM8009P, DM4340P, DM4340 y DM4310, maneja cargas útiles de 6.0 kg con precisión. Diseñado para uso industrial y de investigación, equilibra la robustez estructural con un control de movimiento preciso.

Related Collections



