Piloto automático del controlador de vuelo HEX Pixhawk 2.1 PX4 PIX de 32 bits: el cubo naranja + juego estándar con 3 GPS y placa portadora de ADS-B
Piloto automático del controlador de vuelo HEX Pixhawk 2.1 PX4 PIX de 32 bits: el cubo naranja + juego estándar con 3 GPS y placa portadora de ADS-B
RCDrone
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES
Distancia entre ejes: Tornillos
Uso: Vehículos y juguetes de control remoto
Piezas/accesorios de mejora: Brazo
Suministros de herramientas: Clase ensamblada
Parámetros técnicos: Valor 2
Tamaño: 1
Periféricos/dispositivos de control remoto: Servos
Edad recomendada: 12+y
RC Piezas y accesorios: Servos
Cantidad: 1 piezas
Origen: China continental
Número de modelo: HEX-CUBE+
Material: Metal
Atributos de tracción en las cuatro ruedas: Ensamblaje
Para tipo de vehículo: Coches
Certificación: CE
Nombre de marca: Feetech
Tenga en cuenta: la diferencia entre Cube Orange y Cube Orange+ es que Cube Orange se puede actualizar al firmware PX4, mientras que Cube Orange+ no admite la actualización del firmware PX4
Para obtener más información, visite el sitio web oficial:https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview
Características
- Admite múltiples modos como Merodeo, Mantenimiento de altitud, modo (con Waypoints), modo de seguimiento, etc.
- Admite estaciones de control terrestre Mission Planner y QGroundControl
- Vuelo incorporado registro
- Transmisión de datos de vuelo en tiempo real
- Admite evitar objetos en 360 grados
- Equipado con un procesador H7 de alto rendimiento
H7 tiene doble FPU de precisión (DP), 1 MB de RAM y procesador de CPU de 400 MHz que proporciona un alto rendimiento, un funcionamiento extremadamente rápido y una solución estable para el vuelo.
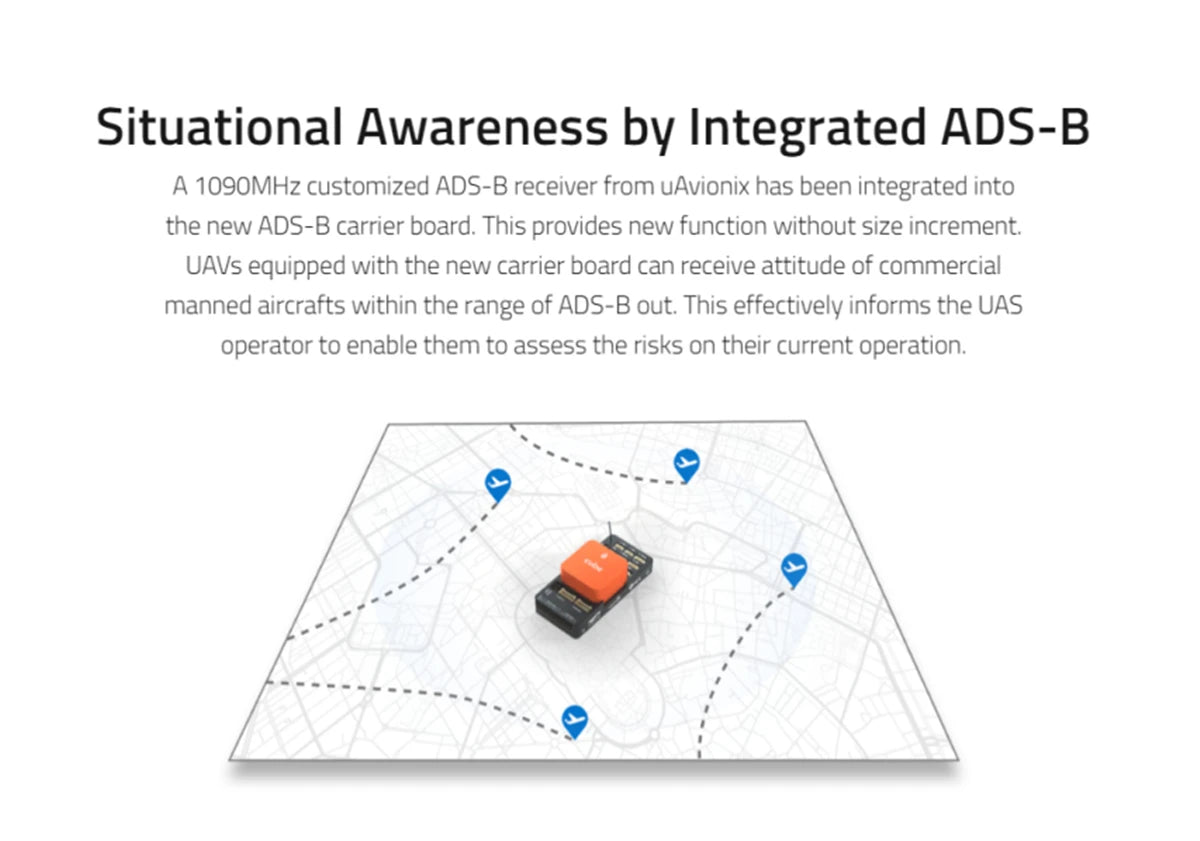
- Conciencia de la situación mediante ADS-B integrado
Un 1090MHz personalizado El receptor ADS-B de uAvionix se ha integrado en la nueva placa portadora ADS-B. Esto proporciona una nueva función sin incremento de tamaño. Los vehículos aéreos no tripulados equipados con la nueva placa portadora pueden recibir la actitud de los aviones tripulados comerciales dentro del alcance del ADS-B. Esto informa eficazmente al operador del UAS para permitirle evaluar los riesgos de su operación actual.
Fácil conmutación del voltaje de la señal de salida PWM
La salida PWM admite la conmutación entre niveles de señal de 3,3 V y 5 V. La conmutación de voltaje se puede realizar mediante el software de la estación de control de tierra. Esto mejora la compatibilidad con varios periféricos externos.
Compatibilidad con múltiples tipos de vehículos: incluidos helicópteros, multicópteros, ala fija, VTOL, rover, barco, submarino, etc.
Detalles del producto
Procesador principal:STM32H757(El nuevo chip tiene buen rendimiento)
Coprocesador:STM32F1
Señales RC admitidas:PPM/SBUS/DSM
Redundancia de energía:Triple redundancia
Sensores:Triple Sistema IMU
Detalles de los sensores: ICM20649 (acelerómetro integrado+giroscopio)
ICM20602 (acelerómetro integrado+giroscopio)
ICM20948 (acelerómetro integrado+giroscopio+magnetómetro)
MS5611 x 2 (Baro)
Firmware :Firmware del controlador de vuelo de código abierto PX4 no compatible
Tipos de vehículos admitidos: aviones de ala fija, helicópteros con 3-8 motores, helicópteros, aviones VTOL, vehículos exploradores/barcos/submarinos
Peso: 73 g
Material del chasis :Aleación de aluminio CNC (cubo)+Moldura ABS (placa portadora)
Tamaño del cubo: 38,4x38,4x22 mm
Placa portadora: 94,5x44,3x17.3 mm
Temperatura de funcionamiento: -10~+55° IMU con control de temperatura
E/S PWM: 14
Interfaz serial Mavlink: 2
Número de GPS admitidos: 2
Interfaz de depuración: 1
Interfaz I2C: 1
Interfaz CAN: 2
Aquí3
GNSS:Sí
Brújula:Sí
Protocolo:CAN
Sistema operativo en tiempo real:Sí
Actualización de firmware:Sí
RTK:Sí
A prueba de polvo, resistente al agua:Sí
Tipo de receptor: módulos GNSS de alta precisión u-blox M8 (M8P)
Constelación de satélites: GPS L1C/A, GLONASS L1OF, BeiDou B1I
Precisión de posicionamiento: 3D FIX: 2,5 m / RTK: 0,025 m
Procesador:STM32F302
Snesor IMU:ICM20948
Velocidad de actualización de navegación: máx. 8 Hz
Protocolo de comunicación:CAN
Temperatura de funcionamiento: -40 °C a 85 °C
Dimensión: 76 mm x 76 mm x 16,6 mm
Peso: 48,8 g





El HEX Pixhawk 2.1 de PX4 es el piloto automático más avanzado del mundo para vehículos autónomos no tripulados abiertos. Este controlador en forma de cubo cuenta con componentes redundantes, aislados y con temperatura controlada.
La placa portadora cuenta con un receptor ADS-B personalizado de uAvionix, que opera a 1090 MHz, lo que permite a los operadores de UAS evaluar riesgos potenciales en sus operaciones actuales.

La salida PWM admite el cambio entre niveles de señal de 3,3 V y 5 V, lo que le permite utilizar el software de la estación de control terrestre para cambiar entre estos dos niveles de voltaje.
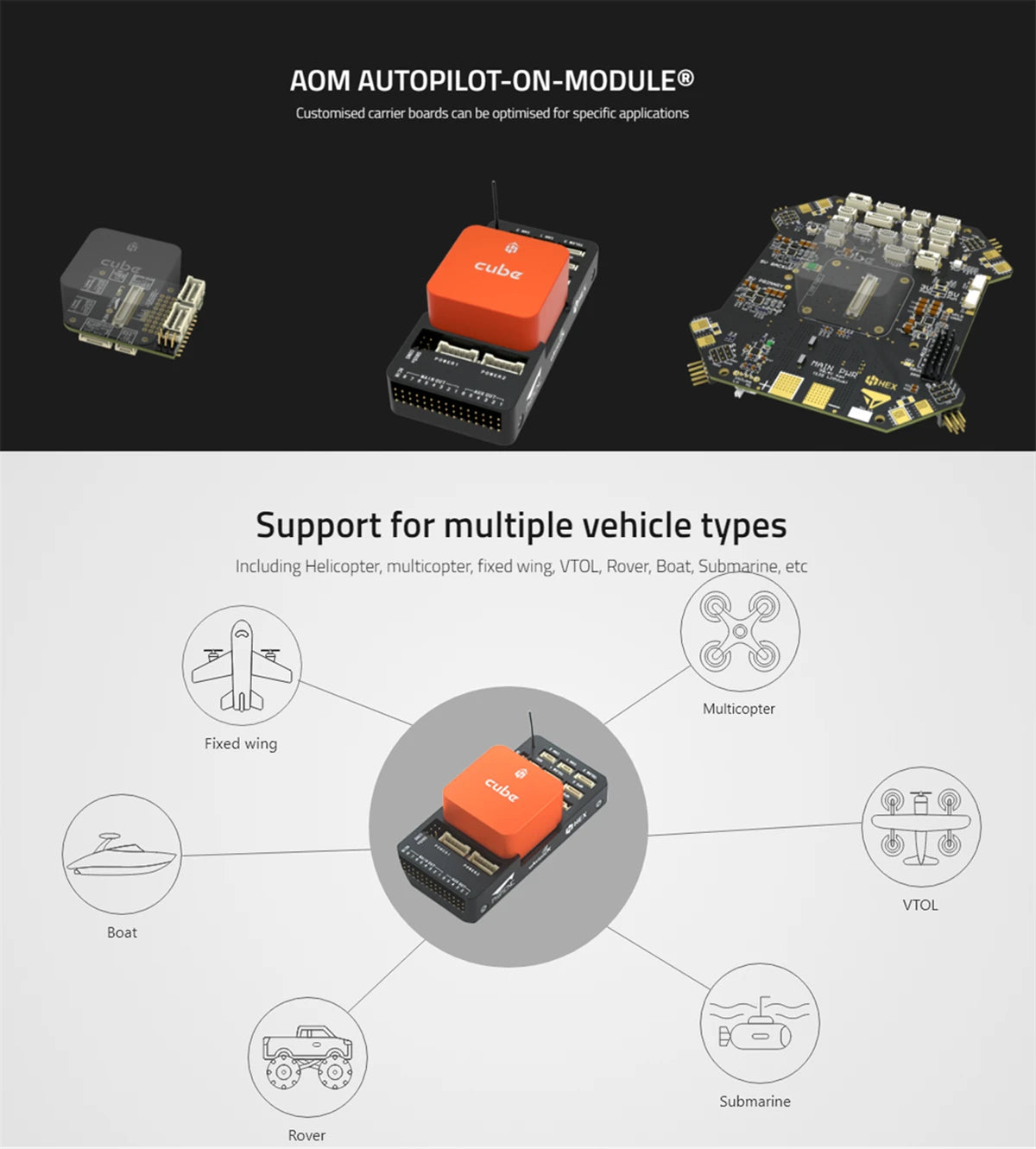
El APM (Piloto automático en módulo) ofrece placas portadoras personalizadas que se pueden optimizar para aplicaciones específicas y admiten múltiples tipos de vehículos, incluidos helicópteros, multicópteros, aviones de ala fija, VTOL, rovers, barcos y submarinos. y muchos otros.
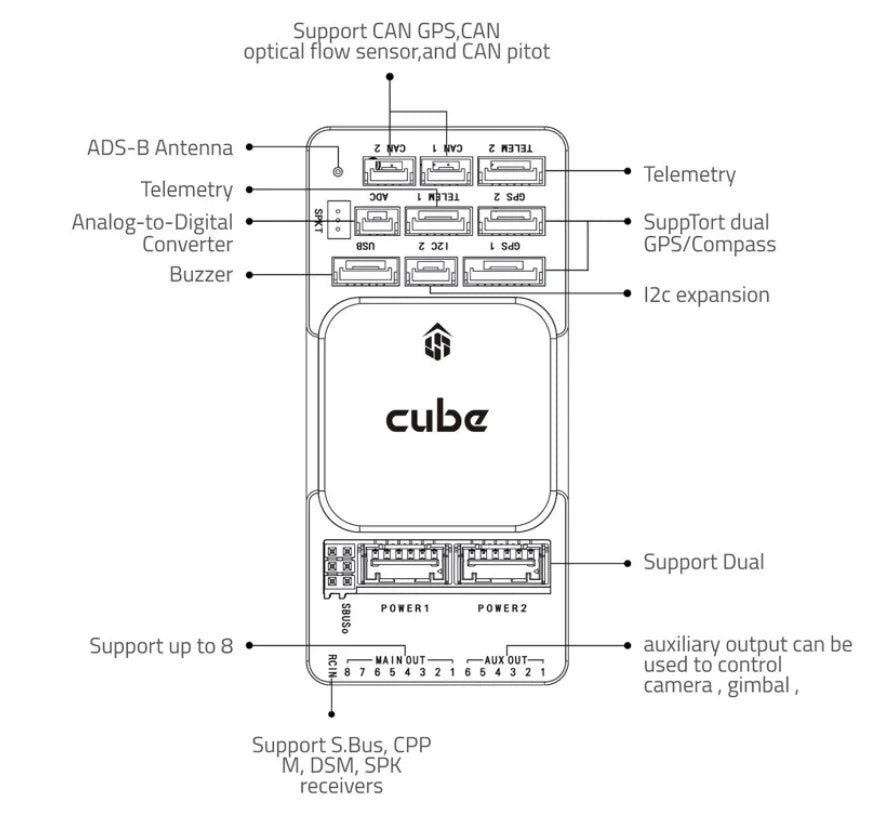
Este controlador de vuelo admite varios periféricos, incluidos: * Bus CAN para GPS, sensor de flujo óptico y datos Pitot * Antena ADS-B para navegación mejorada * Funciones de telemetría con conversión de analógico a digital SD9 * Capacidades de expansión I2C para sensores o dispositivos adicionales * Opciones de fuente de alimentación dual para redundancia * Hasta 8 salidas auxiliares que se pueden utilizar para controlar varios dispositivos, como: + 6 cámaras o gimbals vía protocolo S-Bus

Este controlador de vuelo presenta un diseño mejorado con resistencia al agua, lo que lo hace adecuado para su uso en diversos entornos. Además, incorpora un chip GNSS rentable de alta precisión que permite capacidades de posicionamiento precisas (nota: se requiere una estación base para el modo cinemático en tiempo real (RTK)).
Related Collections