CUAV NUEVO controlador de vuelo con piloto automático V5+, basado en FMU V5, hardware de código abierto para FPV RC Drone Quadcopter Helicóptero Pixhawk
CUAV NUEVO controlador de vuelo con piloto automático V5+, basado en FMU V5, hardware de código abierto para FPV RC Drone Quadcopter Helicóptero Pixhawk
CUAV
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES
Distancia entre ejes: Placa inferior
Piezas/accesorios de mejora: Controlador de vuelo
Suministros de herramientas: Clase ensamblada
Parámetros técnicos: Valor 10
Tamaño: como descripción
Dispositivos/periféricos de control remoto: Receptores
Edad recomendada: 12+y,18+
Piezas y accesorios RC: Componentes del motor
Cantidad: 1 piezas
Origen: China continental
Modelo Número: Controlador de vuelo con piloto automático CUAV NEW V5+
Material: Material compuesto
Cuatro- Atributos de tracción en las ruedas: Ensamblaje
Para tipo de vehículo: Helicópteros
V5 + AutoPilot
V5+ AutoPilot® es un piloto automático avanzado diseñado y fabricado en CUAV®. La placa se basa en el diseño de hardware abierto FMUv5, la interfaz externa utiliza los pines estándar Dronecode y el diseño modular permite al usuario diseñar su backplane. Es totalmente compatible con el firmware PX4 y ArduPilot. Se utiliza principalmente para el desarrollo académico y empresarial.
Resumen rápido
Procesador FMU principal: STM32F765
32 Bit Arm® Cortex®-M7, 216 MHz, 2 MB de memoria , 512 KB de RAM
Procesador IO: STM32F100
32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
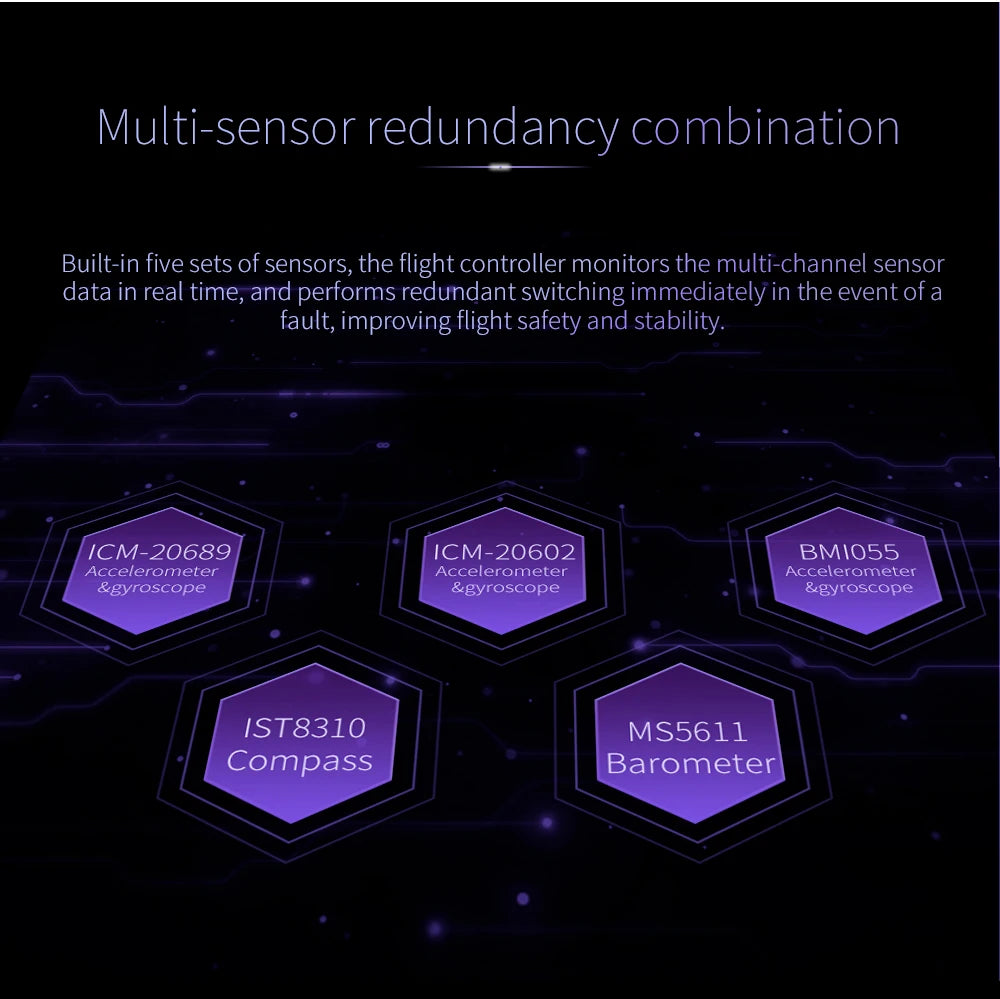
Sensores integrados:
Acelerómetro/Giroscopio: ICM-20689
Acelerómetro/Giroscopio: BMI055
Magnetómetro: IST8310
Barómetro: MS5611
Interfaces:
8-14 salidas PWM (6 de IO, 8 de FMU)
3 entradas dedicadas de captura/PWM en FMU
R/C dedicado entrada para CPPM
Entrada R/C dedicada para PPM y S.Bus
entrada analógica/PWM RSSI
Servo S.Bus salida
5 puertos serie de uso general
4 puertos I2C
4 buses SPI
2 CANBuses con ESC serie
Entradas analógicas para tensión/corriente de 2 baterías
Sistema de alimentación:
Alimentación: 4.3~5.4V
Entrada USB: 4.75~5.25V
Entrada de servo riel: 0~36V
Peso y Dimensiones:
Peso: 90g
Dimensiones: 85.5*42*33mm
Otras Características:
Temperatura de funcionamiento: -20 ~ 80°c(Valor medido)
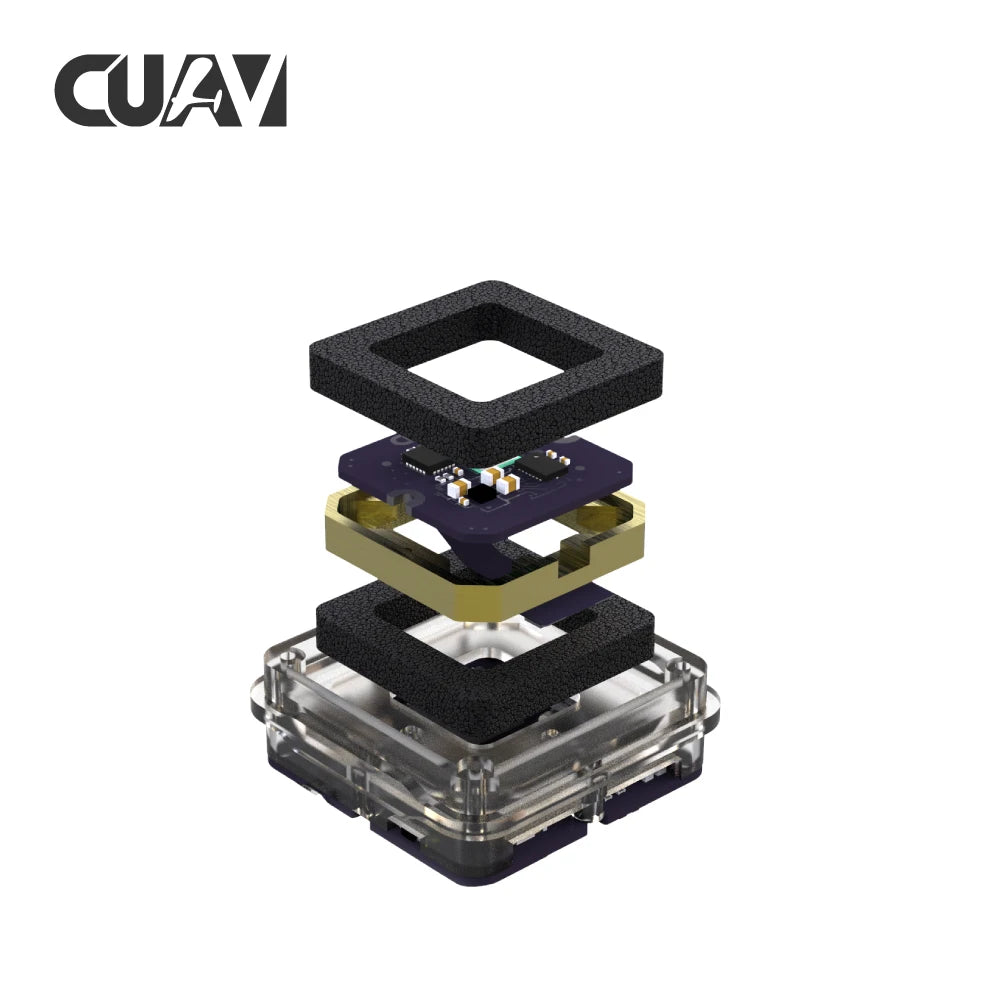
Con un procesador principal STM32F765 de alto rendimiento, este sistema de piloto automático cuenta con múltiples conjuntos de sensores redundantes y una rica interfaz de E/S. Su diseño modular permite una fácil personalización para satisfacer sus necesidades específicas.
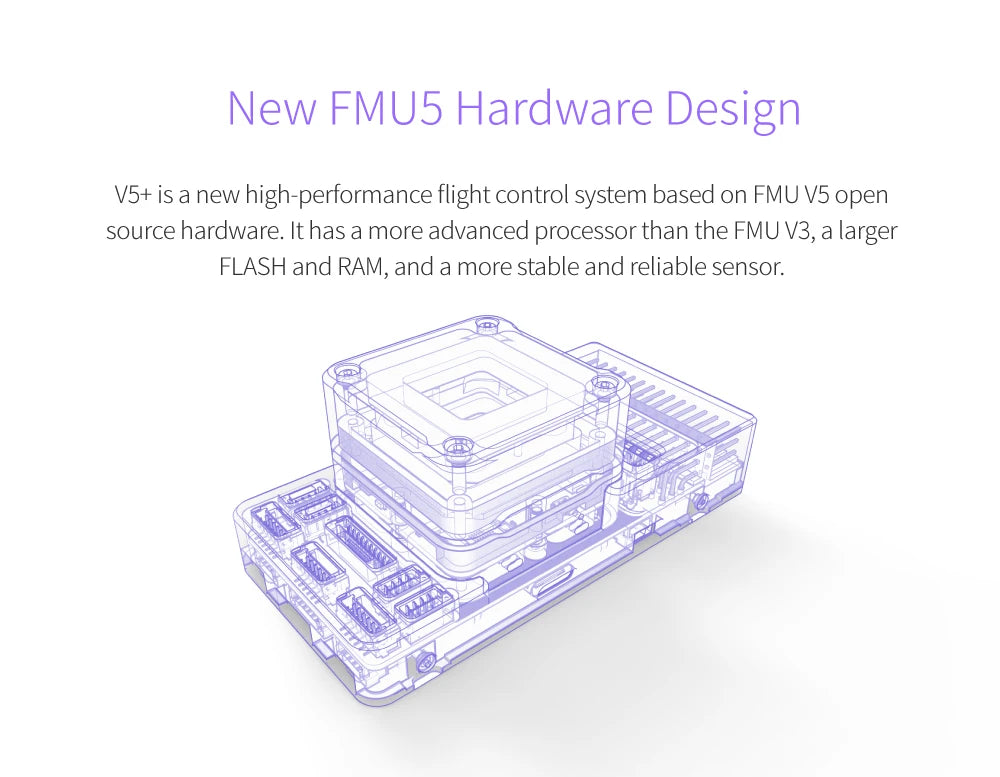
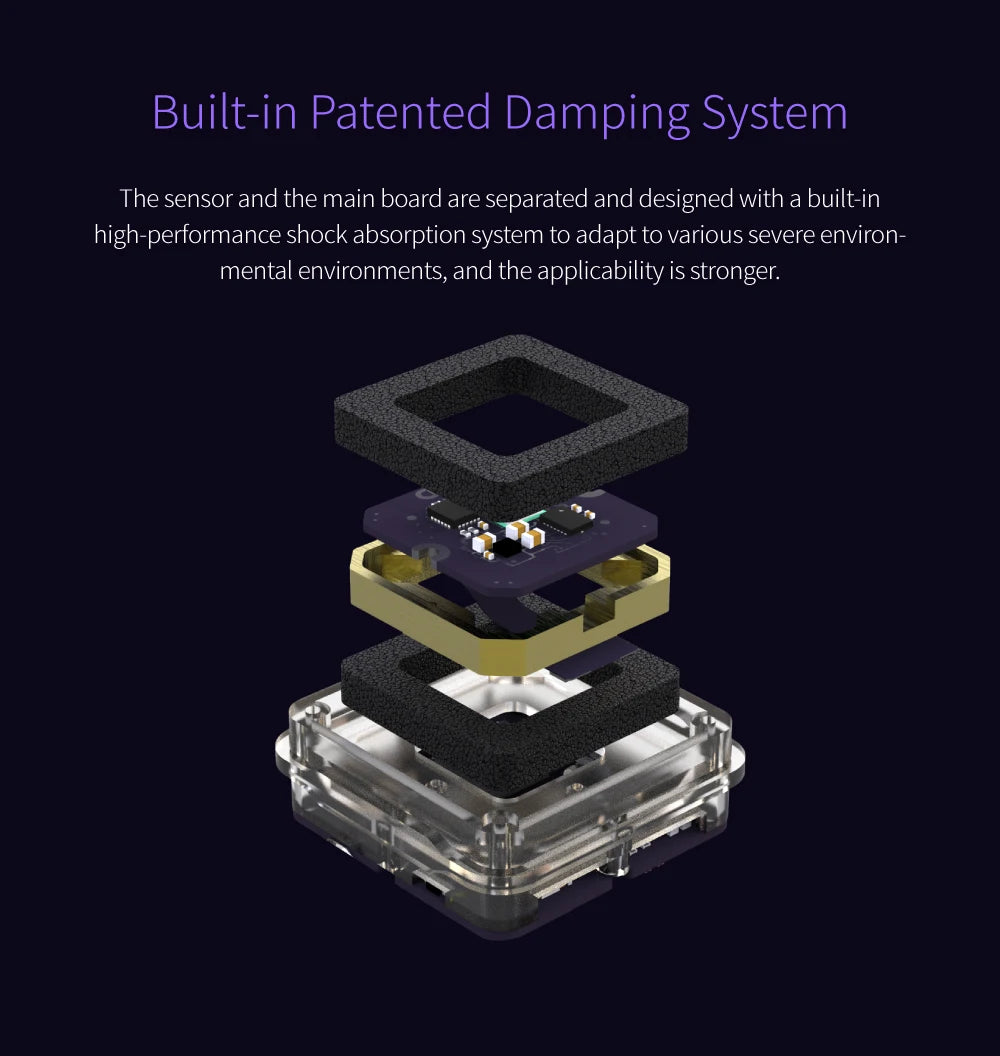
El controlador de vuelo con piloto automático CUAV NEW V5+ presenta un sistema de control de vuelo avanzado y de alto rendimiento construido sobre hardware de código abierto. En comparación con su predecesor, el FMU V3, cuenta con un procesador más potente, mayor almacenamiento FLASH y capacidades de RAM mejoradas. El controlador de vuelo con piloto automático CUAV NEW V5+ presenta un diseño modular que facilita la integración del usuario. El backplane desmontable sirve únicamente como soporte para interfaces externas, proporcionando un medio conveniente para conectar periféricos y accesorios. El controlador de vuelo con piloto automático CUAV NEW V5+ cuenta con un sistema de absorción de impactos incorporado diseñado para adaptarse a diversas condiciones ambientales severas, proporcionando mayor durabilidad y confiabilidad en entornos extremos. CUAV se dedica a mejorar el ecosistema PX4, con el controlador de vuelo con piloto automático CUAV NEW V5+ diseñado de acuerdo con el estándar Dronecode/PX4. El hardware y las interfaces de VS+ se basan en este marco líder en la industria. El controlador de vuelo con piloto automático CUAV NEW V5+ monitorea continuamente los datos del sensor multicanal en tiempo real, realizando instantáneamente conmutación redundante en caso de una falla para garantizar una seguridad y estabilidad óptimas del vuelo. El controlador de vuelo con piloto automático CUAV NEW V5+ cuenta con el procesador avanzado STM32F765, que proporciona importantes mejoras de rendimiento en comparación con los modelos anteriores. Esta actualización ofrece mayores velocidades de reloj, capacidades de RAM ampliadas y una velocidad de procesamiento mejorada en general para mejorar el rendimiento del sistema.

El paquete incluye:
FC con GPS:
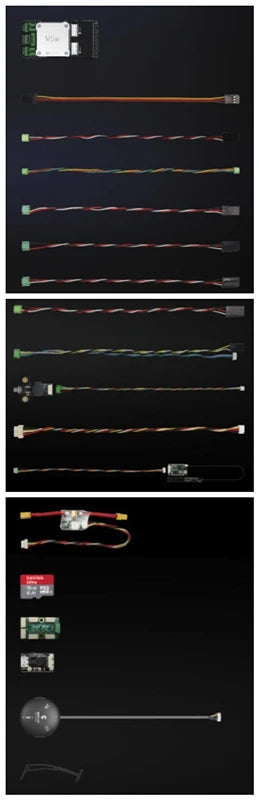
Imagen del producto:
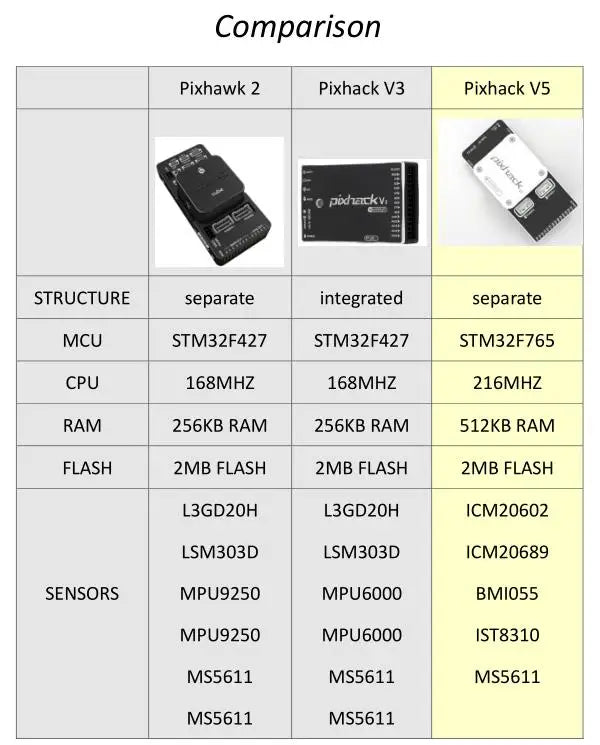
El controlador de vuelo con piloto automático CUAV NEW V5+ presenta una arquitectura de hardware robusta y confiable, incorporando la plataforma Pixhawk 2.0 con módulos separados para procesamiento integrado. La MCU se basa en el chip STM32F427, que funciona a una frecuencia de 168 MHz, con capacidades de RAM de 256 KB, 512 KB y almacenamiento FLASH de 2 MB. Además, el sistema incluye una variedad de sensores, incluidos L3GDZOH, ICM20602, LSM303D, ICM20689, MPU9250, MPU6000, IST8310 y MS5611.