Controlador de vuelo CUAV Nora - Código abierto para APM PX4 Pixhawk FPV RC Drone Quadcopter en lugar de v3x
Controlador de vuelo CUAV Nora - Código abierto para APM PX4 Pixhawk FPV RC Drone Quadcopter en lugar de v3x
CUAV
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES del controlador de vuelo CUAV Nora
Distancia entre ejes: Tornillos
Uso: Vehículos y juguetes de control remoto
Piezas/accesorios de mejora: Hueso de perro
Suministros de herramientas: Corte
Parámetros técnicos: Valor 2
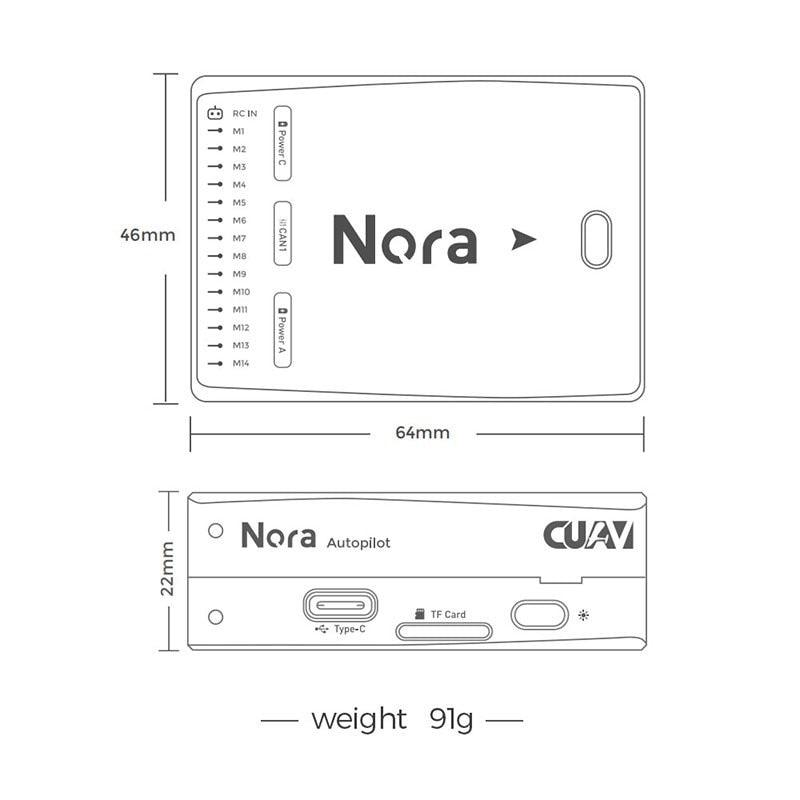
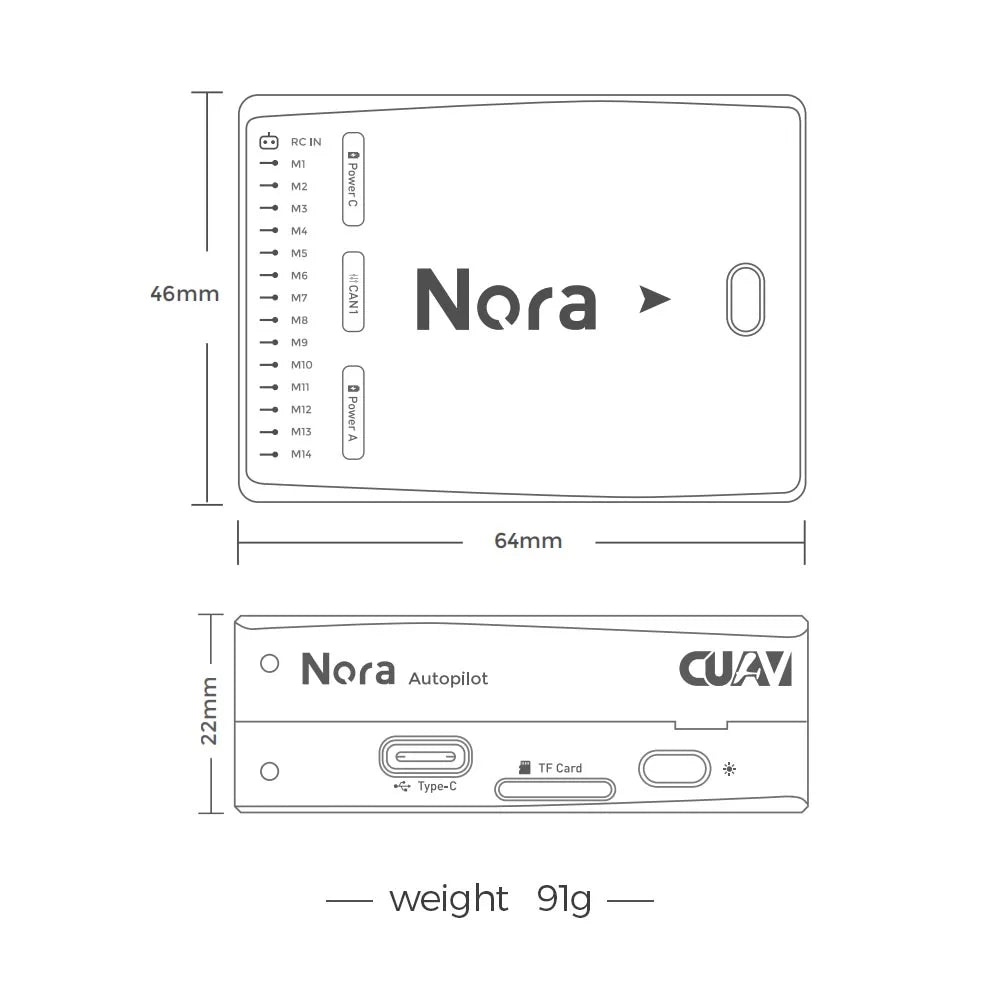
Tamaño: 85x42x33
Dispositivos/periféricos de control remoto: Controlador remoto
Edad recomendada: 18+
Piezas y accesorios de RC: Motores
Cantidad: 1 unidad
Origen: China continental
Número de modelo: CUAV Nora
Material: Metal
Atributos de tracción en las cuatro ruedas: Motores
Para tipo de vehículo: Aviones
Controlador de vuelo CUAV Nora Control de vuelo de código abierto para APM PX4 Pixhawk FPV RC Drone Quadcopter en lugar de v3x
Especificación:
Más rápido que nunca
adaptarse a entornos hostiles
siempre estable
Diseño integrado
Diseño de absorción de choque incorporado
Calidad Cuav
El paquete incluye:
1 * Piloto automático Nora pro
1*Interruptor de seguridad
1*Pw-link módulo
1* juego de cables


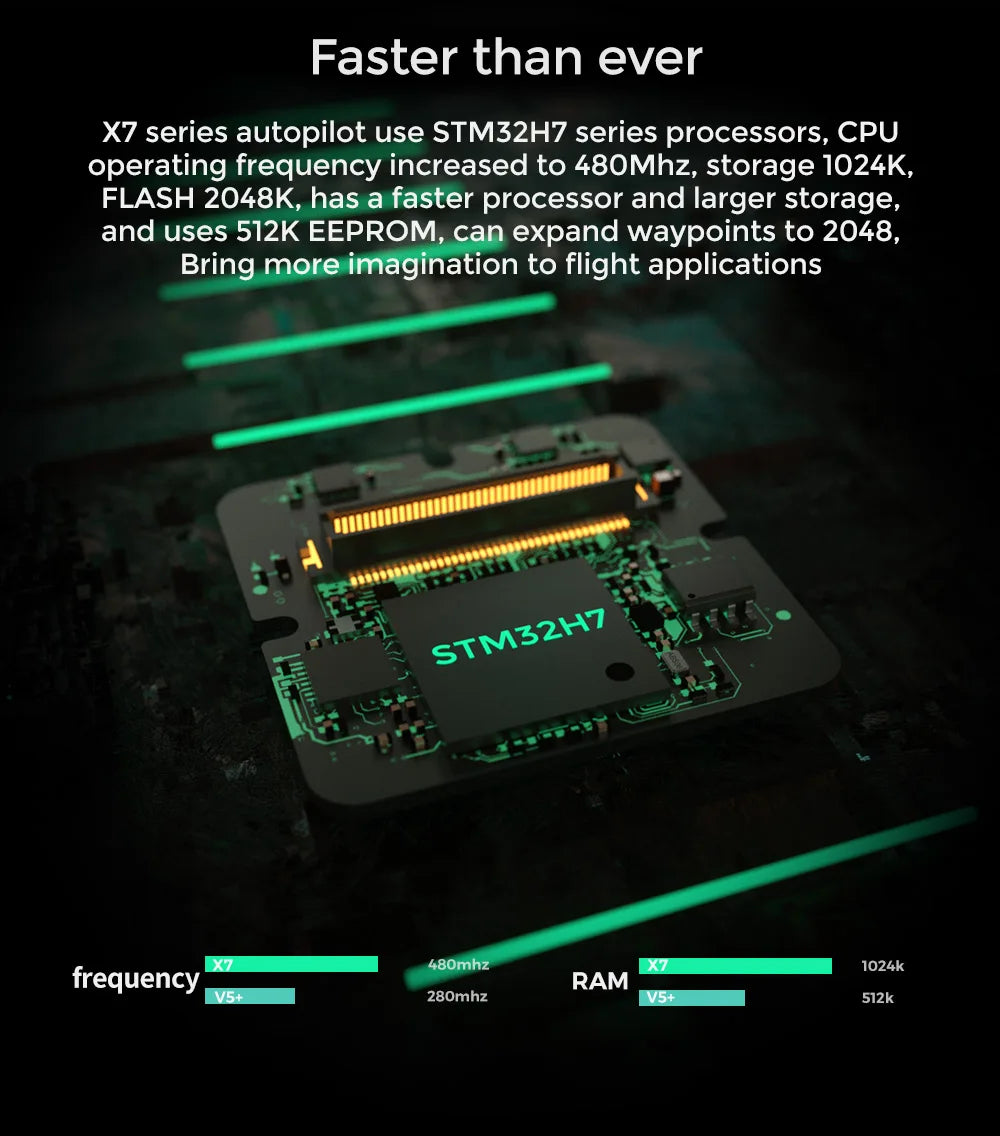
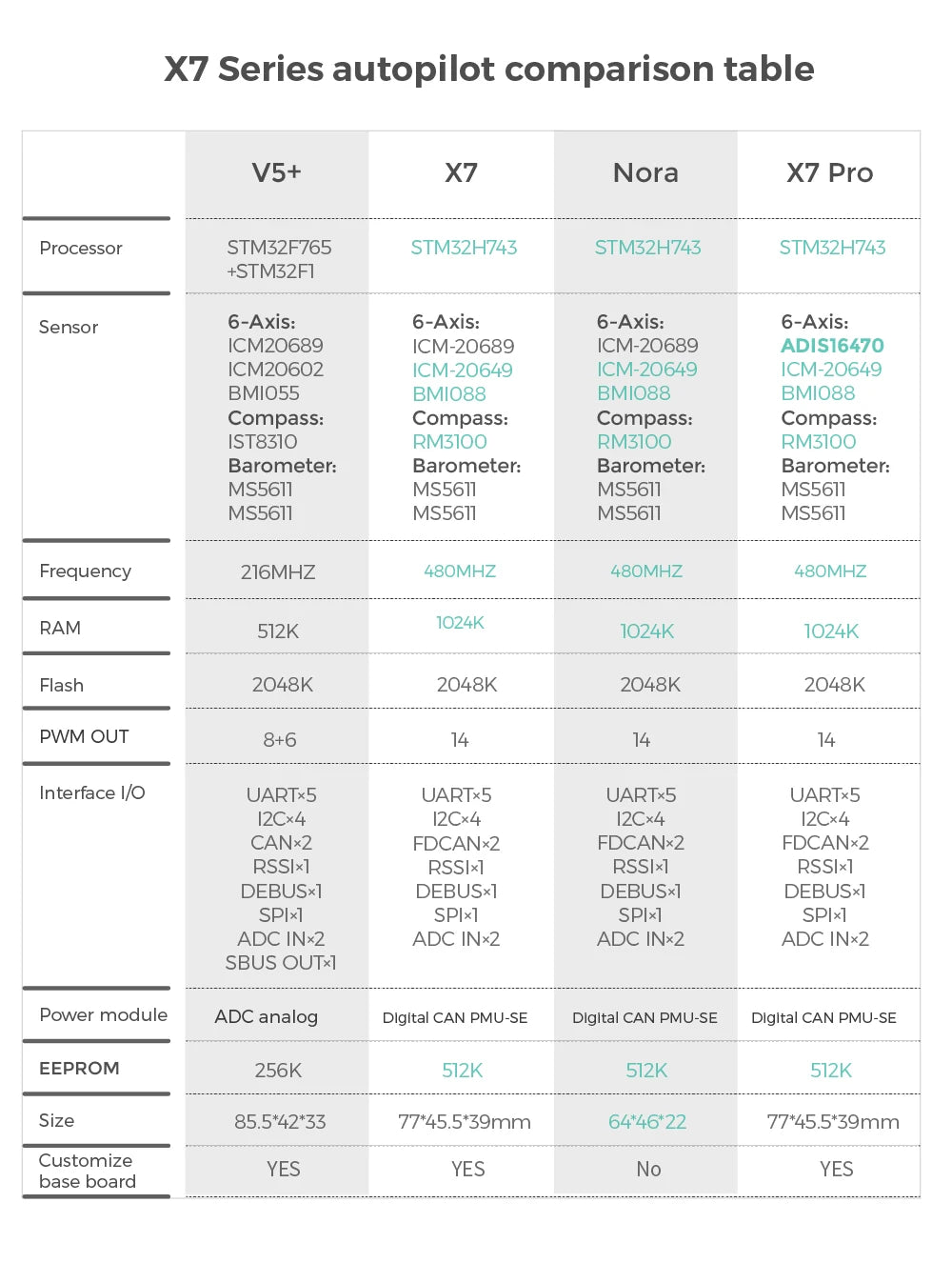
El controlador de vuelo CUAV Nora utiliza un procesador de la serie STM32H7, que proporciona un rendimiento más rápido y una mayor capacidad de almacenamiento en comparación con los modelos anteriores. Esta potencia de procesamiento mejorada también permite la expansión de puntos de referencia hasta 2048, al tiempo que presenta EEPROM de 512 K y una frecuencia operativa VS5T de 280 MHz.

El piloto automático de la serie X7 cuenta con una impresionante variedad de componentes de alta calidad, incluidos sensores avanzados respaldados por un sistema integrado de compensación de temperatura de alta precisión para un rendimiento y precisión óptimos.

El controlador de vuelo CUAV Nora cuenta con importantes mejoras en términos de navegación y tecnología de sensores. La inclusión de una brújula RM3IOO de grado industrial mejora la estabilidad del vuelo y el rendimiento antiinterferencias, mientras que los sensores de la serie ADI + TE de Bosch mejoran aún más la resistencia al ruido y la vibración.
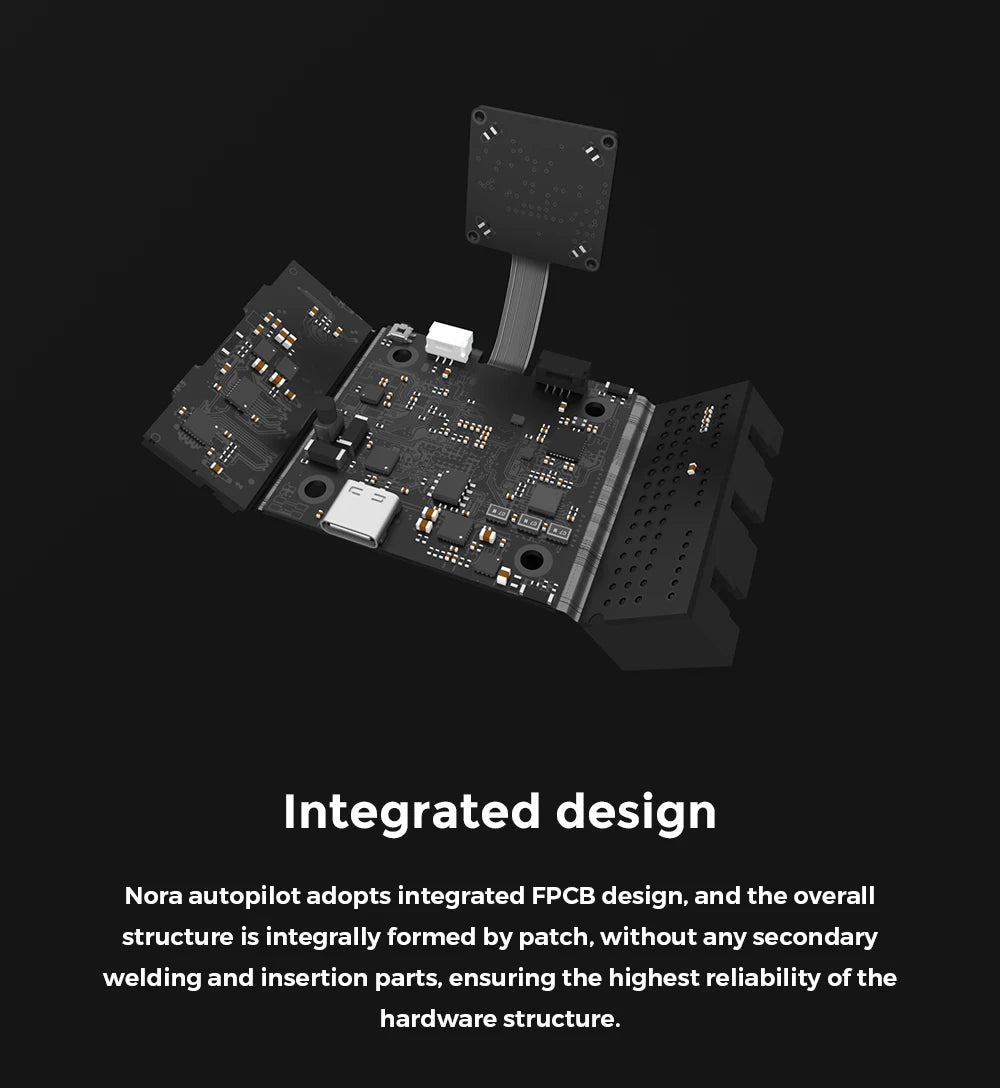
El controlador de vuelo CUAV Nora presenta un innovador diseño integrado FPCB (placa de circuito impreso flexible), que permite una estructura única y unificada que elimina la necesidad de soldadura o ensamblaje secundario. Este enfoque integrado crea un sistema general más sólido y confiable.

El controlador de vuelo CUAV Nora cuenta con un sistema de absorción de impactos incorporado, diseñado específicamente para mejorar la estabilidad general y la capacidad de respuesta del piloto automático. Este diseño compacto permite una experiencia de vuelo más fluida y brinda mayor tranquilidad durante el vuelo.

El controlador de vuelo CUAV Nora se basa en la serie X7, que fue diseñada y probada exhaustivamente por el estimado equipo de APM y PX4. Cada piloto automático se sometió a pruebas rigurosas, con verificación de E/S independiente para garantizar una estabilidad y confiabilidad excepcionales.
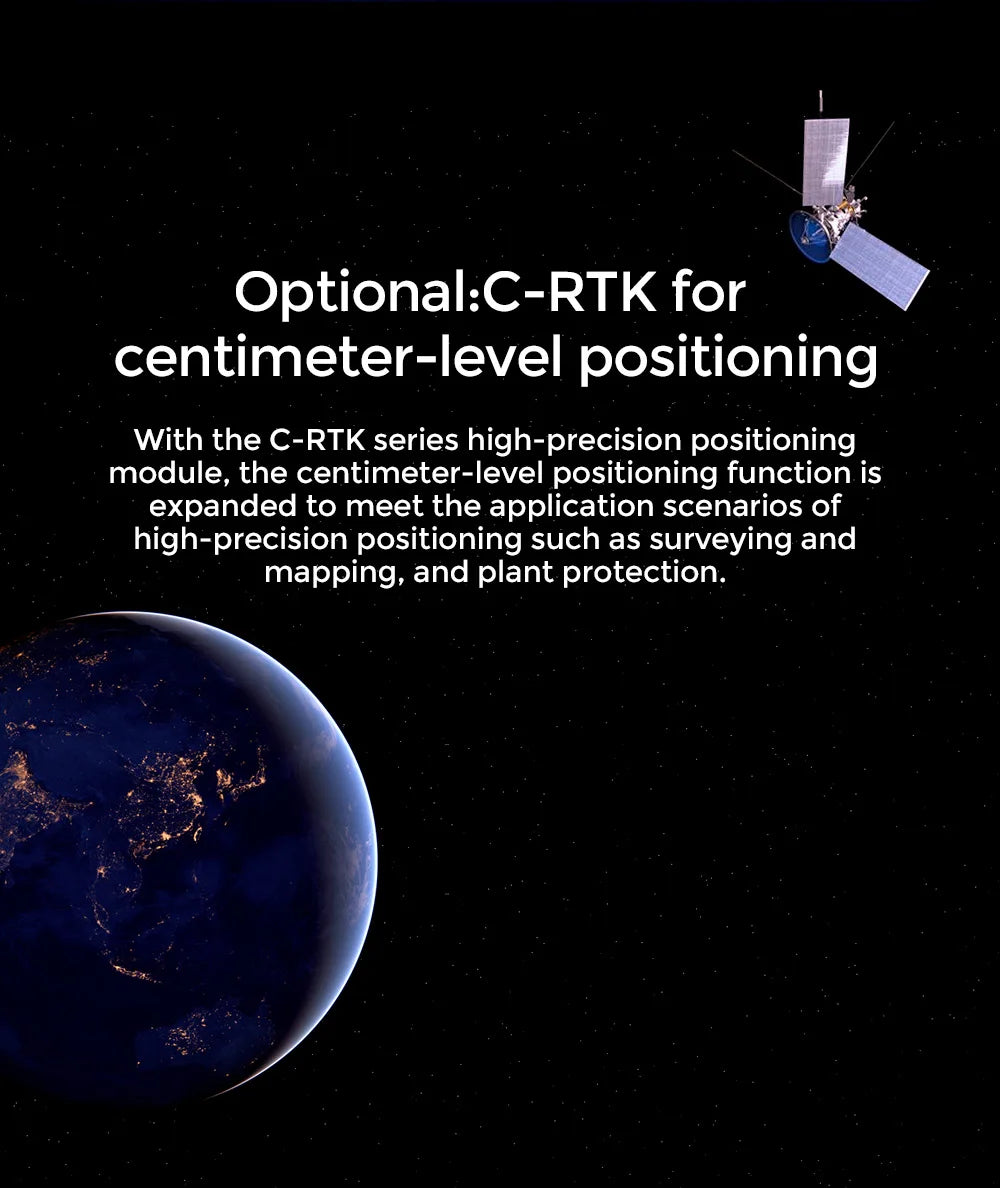
La tecnología C-RTK (cinemática en tiempo real) opcional permite una precisión de nivel centimétrico en el posicionamiento, ampliando las capacidades del piloto automático para cumplir con diversos escenarios de aplicación y brindando una precisión excepcional para sus operaciones con drones FPV.
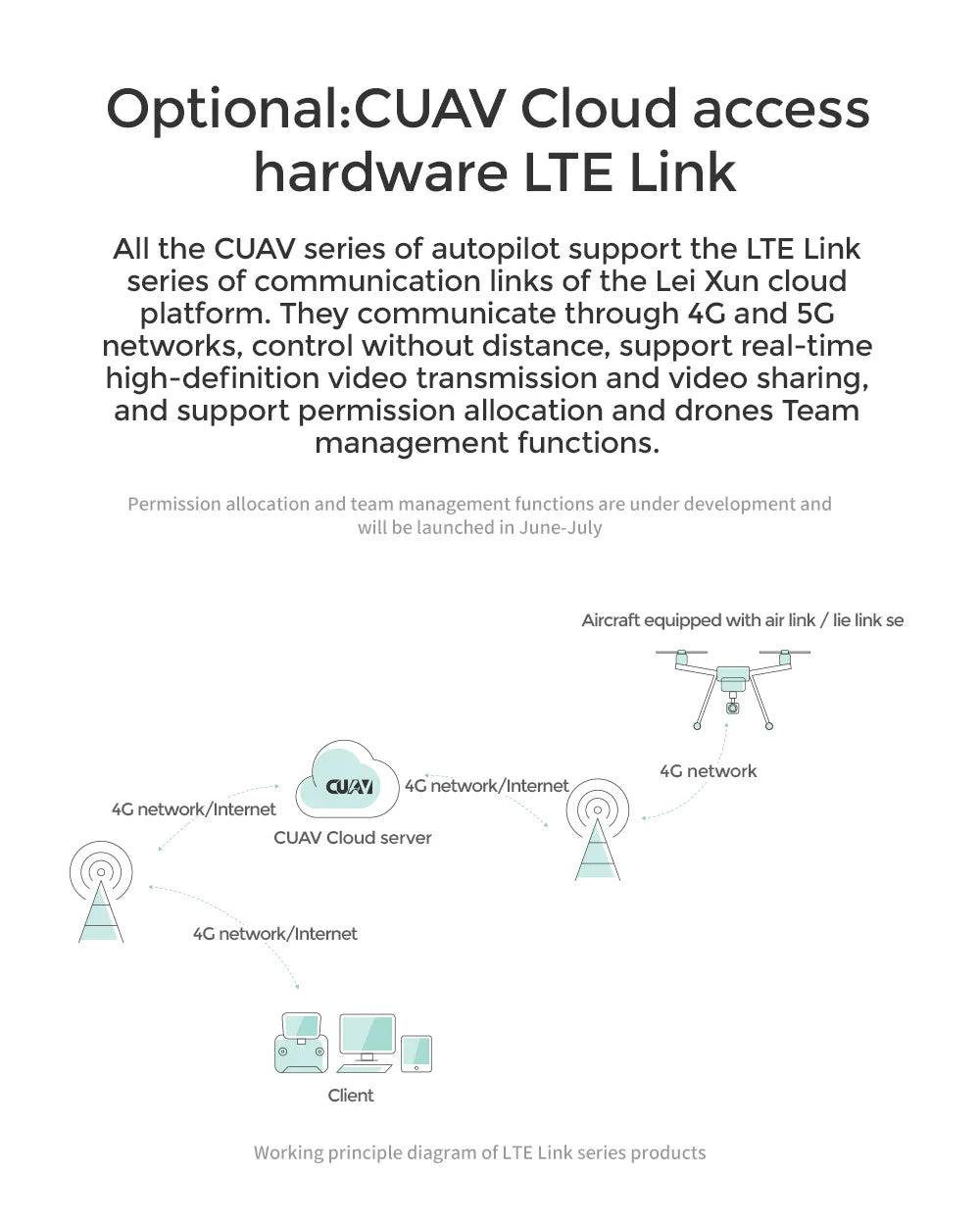
El controlador de vuelo CUAV Nora admite una integración perfecta con la serie LTE Link de Lei Xun Cloud Platform, lo que permite la comunicación a través de redes avanzadas 4G y 5G. Esto permite el control remoto sin limitaciones de distancia, así como la transmisión de video de alta definición en tiempo real y capacidades para compartir.
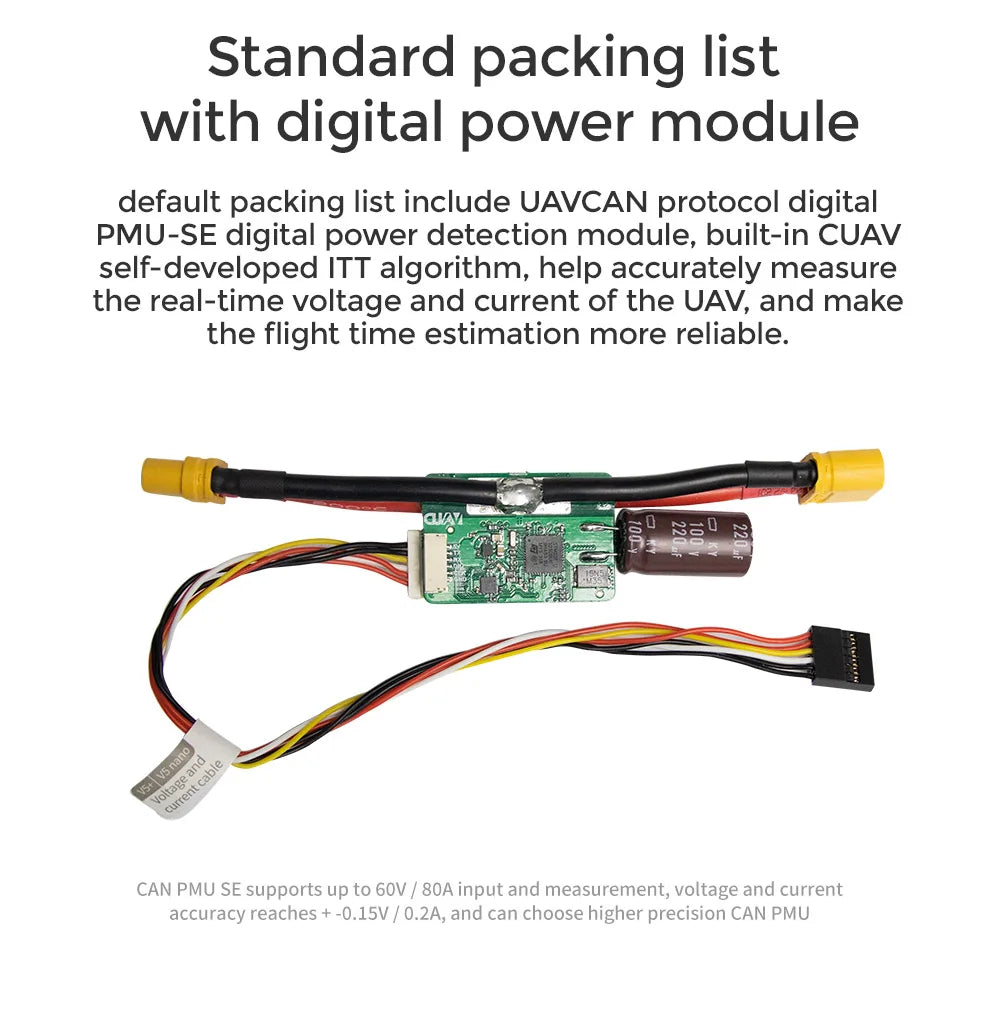
El paquete estándar para el controlador de vuelo CUAV Nora incluye el módulo de detección de potencia digital PMU-SE basado en el protocolo UAVCAN, que proporciona una medición precisa de los niveles de corriente y voltaje en tiempo real del cuadricóptero. Además, el piloto automático cuenta con un algoritmo ITT integrado desarrollado por CUAV, que permite un seguimiento preciso del rendimiento eléctrico del UAV en tiempo real.
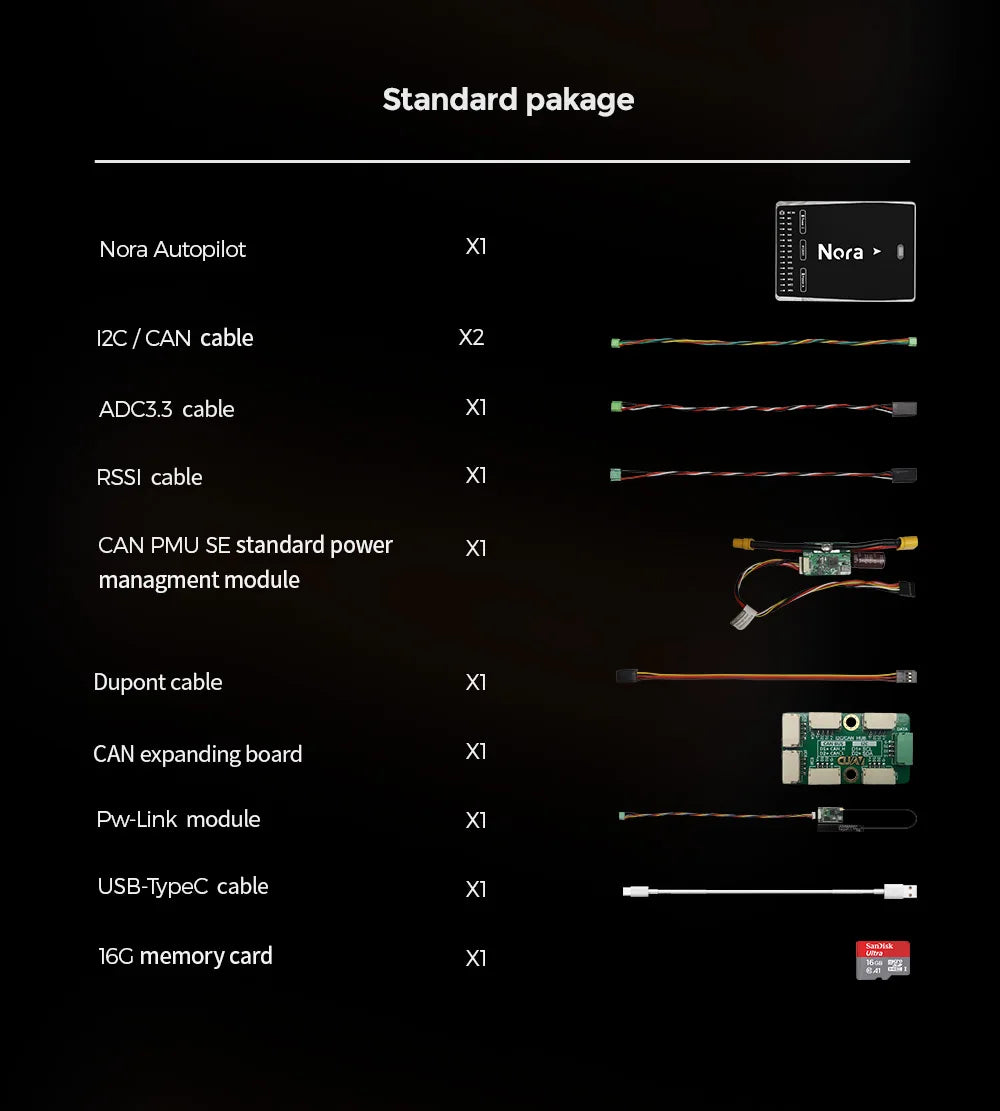
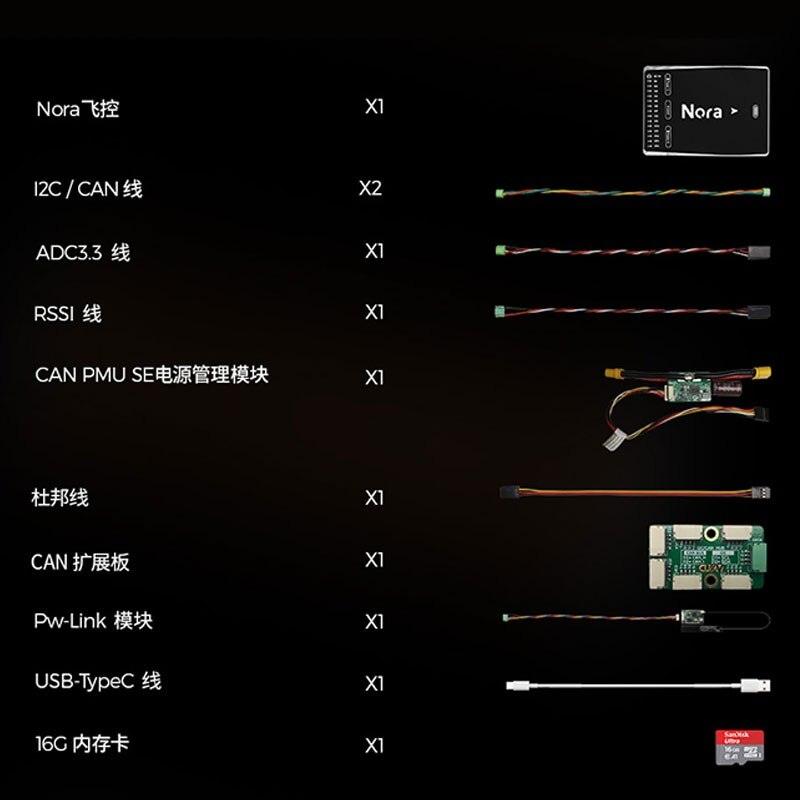
El paquete estándar para el controlador de vuelo CUAV Nora incluye los siguientes componentes: cable I2C/CAN (x2), cable ADC3.3, cable RSSI, módulo de administración de energía estándar PMU-SE, cable Dupont, Placa de expansión CAN, módulo Pw-Link, cable USB tipo C y tarjeta de memoria 16G.

NEO V2 Pro es un sistema de posicionamiento GNSS basado en el protocolo de comunicación UAVCAN. integra una brújula de grado industrial; barómetro; Luces de estado del controlador de vuelo, timbre e interruptor de seguridad en uno.

El controlador de vuelo CUAV Nora cuenta con detección de presión barométrica de alta precisión incorporada, que proporciona datos en tiempo real y sólidas capacidades antiinterferencias para satisfacer las diversas demandas de diversos escenarios de aplicación.
El controlador de vuelo CUAV Nora emplea un amplificador de bajo ruido (LNA) basado en SAW y un diseño de filtrado dual en su variante NEO V2 Pro, protegiendo eficazmente contra interferencias de controles remotos, transmisiones digitales y señales 4G. , lo que garantiza un rendimiento GPS preciso.
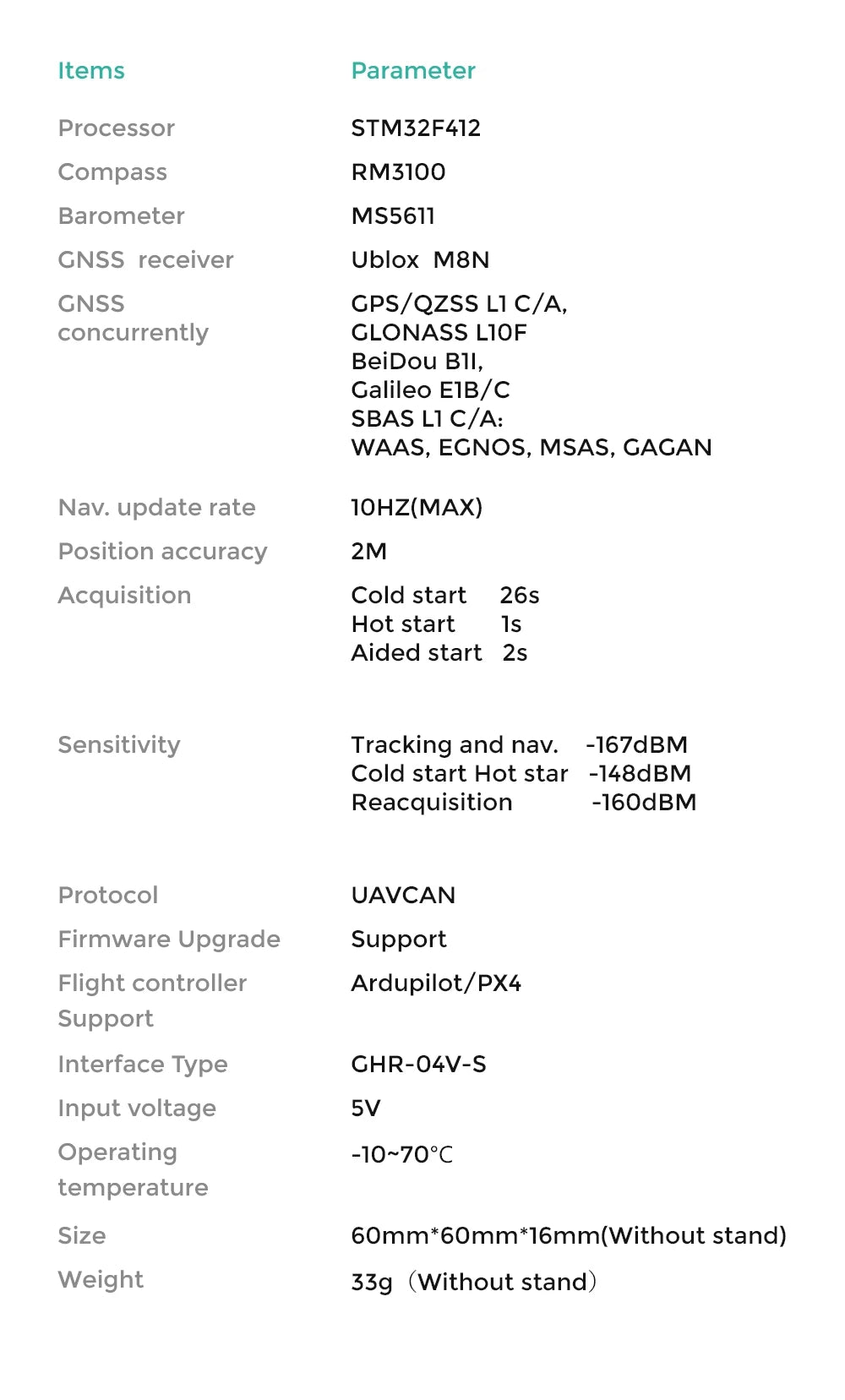
El controlador de vuelo CUAV Nora admite varios sistemas de navegación por satélite, incluidos GLONASS, BeiDou, BII, Galileo EIB/c SBAS y L1/L2/C/A: WAAS, EGNOS, MSAS y GAGAN. . Las especificaciones clave incluyen una velocidad de actualización de E/S de 1MHz (MAX), precisión de posición de 2 metros, tiempo de adquisición de 26 segundos para arranque en frío y -148 dBm para arranque en caliente, tiempo de readquisición de -16 OdBM y soporte de protocolo para UAVCAN. El controlador de vuelo también admite actualizaciones de firmware y es compatible con los sistemas ArduPilot/PX4. El tipo de interfaz es GHR-O4v-S, con un voltaje de entrada de 5 V y un voltaje de funcionamiento que oscila entre [insertar rango].