






Controlador de dron CUAV Pixhawk V6X V2 para PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
Controlador de dron CUAV Pixhawk V6X V2 para PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
CUAV
No se pudo cargar la disponibilidad de retiro
Descripción
CUAV Pixhawk V6X V2 es un controlador de dron de la serie Pixhawk diseñado para el firmware de piloto automático PX4 y ArduPilot. Sigue el estándar FMU v6x de Pixhawk y la filosofía de diseño modular, presentando sensores redundantes de grado industrial mejorados, un reloj externo de temperatura constante y un diseño de disipación de calor para el MCU, conmutación de nivel PWM de 5V/3.3V y una estructura de absorción de impactos patentada. El módulo de gestión de energía PMU 2 Lite estándar admite 70V de entrada y 220A de detección de corriente.
Características Clave
- Unidad de punto flotante de doble precisión H7 (STM32H753IIK6); unidad de punto flotante de doble precisión de 480MHz; 2M de memoria Flash
- Matriz IMU industrial de triple redundancia disímil con diseño de bus y fuente de alimentación independientes (IIM-42652, BMI088, ICM-45686)
- Barómetro dual redundante combinado (BMP581, ICP-20100)
- Sistema de absorción de choque central con absorción de choque en tres ejes (X, Y, Z); diseño de soporte en cuatro esquinas inclinado; nuevo tipo de material absorbente de choque
- Brújula magnética RM3100 de grado automotriz para un robusto rechazo de interferencias magnéticas
- Compensación de reloj de cristal externo IMU (utilizado con reloj externo de temperatura constante de alta precisión para reducir errores de ODR y mejorar la sensibilidad y sincronización)
- Sistema de control de temperatura constante: silicona térmica conductiva y compensación de temperatura IMU para reducir la deriva relacionada con la temperatura
- Software flexible que cambia entre 5V y 3.3V niveles de salida PWM
- Interfaz Ethernet integrada de 100 Mbps para sincronización de datos de alta velocidad con dispositivos como computadoras de misión y cámaras de topografía
- Soporta arranque seguro y servicios de actualización de firmware seguro
- Diseño de fuente de alimentación multi-redundante; soporta entrada PMU CAN de 2 canales; incluye PMU 2 Lite como estándar
- Se han añadido orificios de montaje en la parte inferior para montaje directo con tornillos; orificios de montaje compatibles con tornillos estándar M2
Especificaciones
| Procesador | STM32H753IIK6 |
| Coprocesador | STM32F103 |
| Versión | Pixhawk V6XV2 |
| CPU / memoria (especificada) | Unidad de punto flotante de doble precisión de 480MHz; 2M de memoria Flash |
| Acelerómetro & giroscopio | IIM-42652; BMI088; ICM-45686 |
| Brújula | RM3100 |
| Barómetro | BMP581; ICP-20100 |
| PWM I/O | 16 |
| Nivel PWM | 3.3V / 5V (cambio de software) |
| Potencia | 2 (2 interfaces de alimentación CAN) |
| Puerto GPS | 2 (GPS1: interfaz GPS con I2C y interruptor de seguridad; GPS2: interfaz con I2C y GPS) |
| Puerto TELEM | 3 |
| Bus CAN | 2 |
| PPM RC | 1 (entrada dedicada para receptor PPM) |
| SBUS/DSM/RSSI | 2 (1 entrada SBUS/DSM/Spektrum; 1 analógica 3.3V/PWM entrada) |
| salidas SBUS | 1 |
| depuración FMU | 1 |
| depuración IO | 1 |
| Ethernet | 1 (100 Mbps) |
| SPI externo 1 | 1 (interfaz SP16 para expansión de sensor externo) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| puerto USB | 2 (Tipo-C x1; interfaz GH x1 para conexión USB externa) |
| tarjeta TF | 1 |
| Módulo de alimentación | PMU estándar 2 Lite (versión de 5V), voltaje de entrada: 12-70V |
| Voltaje de operación | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; Potencia: 4.85-5.45V |
| Temperatura de funcionamiento | -20 a 85C |
| Tamaño | 45 x 85.1 x 29.2 mm |
| Peso | Controlador: 97.9g; Núcleo: 43.1g; Placa portadora (incluyendo tornillos): 54.8g |
| Nota de montaje (texto del diagrama) | Los agujeros de montaje son compatibles con tornillos estándar M2; dimensiones mostradas: 72 mm; 22.50 mm; 24 mm |
Qué incluye
- Pixhawk V6X V2 x1
- Módulo de alimentación CAN PMU 2 Lite 5V x1
- Cable de alimentación de encabezado PMU 2 Lite-5V (Versión X7+ (V6X)), longitud del cable: 25cm x1
- Placa de extensión CAN/I2C x1
- Tarjeta de memoria TF x1
- Cable Tipo-C, longitud del cable: 100cm x1
- Cable DSM RC, longitud del cable: 30cm x1
- Cable SBUS RC, longitud del cable: 30cm x1
- Cable PPM RC/SBUS OUT, longitud del cable: 30cm x1
- Cable Ethernet, longitud del cable: 40cm x1
- Cable CAN, longitud del cable: 30cm x1
- Cable TELEM, longitud del cable: 30cm x1
- Cable UART 4, longitud del cable: 30cm x1
- UART4 -> Cable I2C, longitud del cable: 30cm x1
- Cable ADIO, longitud del cable: 30cm x1
- Cable de depuración, longitud del cable: 10cm x1
- Cable de extensión de conector hembra USB -> Tipo-C, longitud del cable: 50cm x1
- 3M Doble Cara x2
Aplicaciones
- Compatible con ArduPilot y PX4
- Soporta multi-rotor, ala fija, ala fija VTOL, helicóptero no tripulado, vehículos no tripulados y barcos no tripulados (submarinos)
- Sincronización de datos Ethernet de alta velocidad con computadoras de misión y otros dispositivos a bordo donde sea compatible
Para verificar compatibilidad y preguntas sobre la configuración, contacta [email protected] o visita https://rcdrone.top/.
Video
Detalles

El controlador de vuelo Pixhawk V6X V2 utiliza un procesador H7 y cuenta con IMU de triple redundancia, barómetro dual y brújula RM3100 con un diseño de absorción de impactos.

El Pixhawk V6X V2 utiliza un procesador STM32H753IIK6 H7 para soportar configuraciones de control de vuelo basadas en PX4 y ArduPilot.

El Pixhawk V6X V2 utiliza un soporte de absorción de impactos de tres ejes (X, Y, Z) con cuatro soportes en las esquinas inclinados para ayudar a reducir la vibración y el ruido.
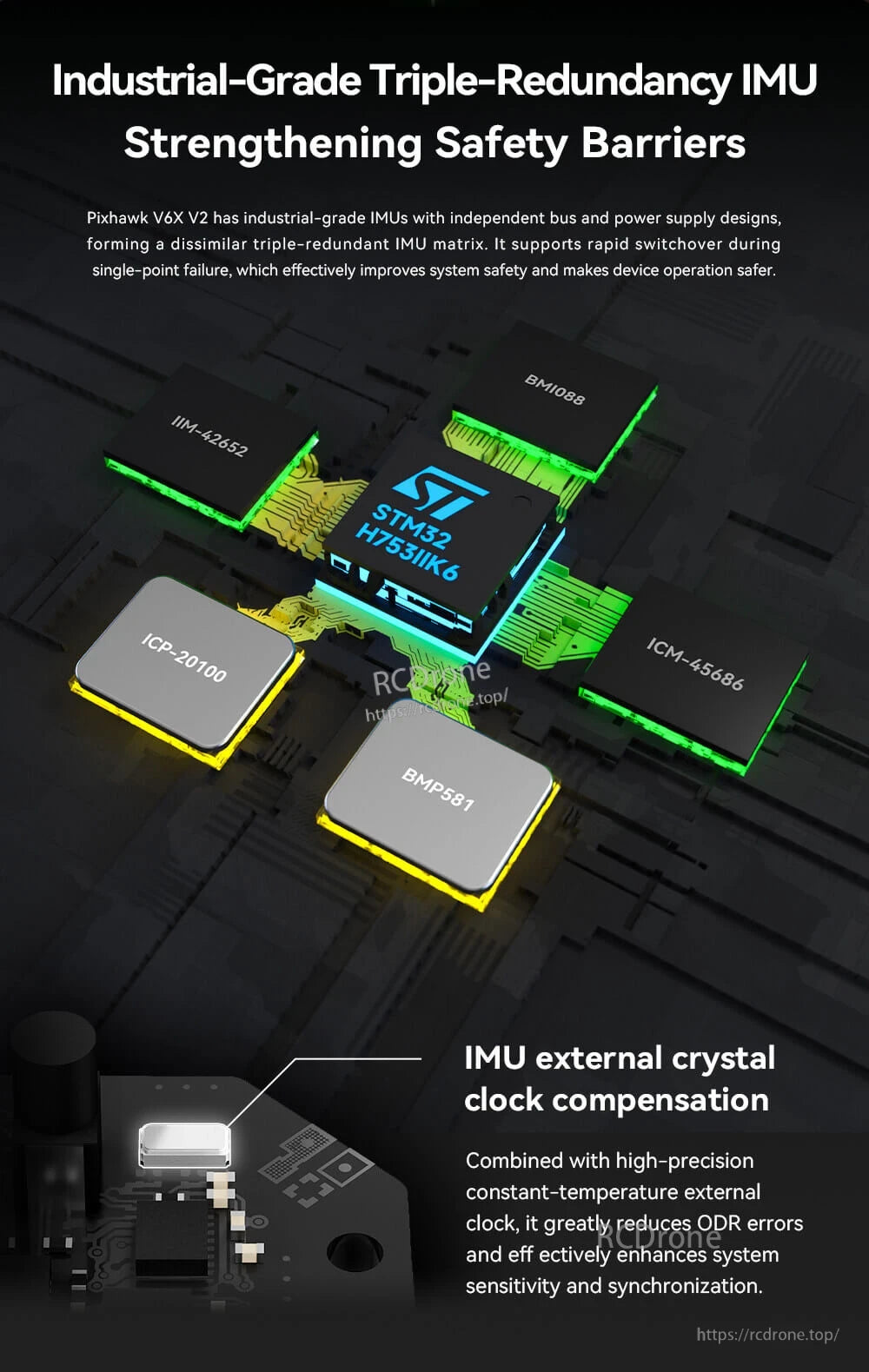
El diseño del controlador de vuelo Pixhawk V6X V2 presenta una configuración de IMU de triple redundancia alrededor del STM32H753IIK6, además de compensación de reloj de cristal externo para el tiempo de sensor.

El Pixhawk V6X V2 integra un magnetómetro RM3100 de grado automotriz y soporta la determinación de rumbo GPS para una orientación y navegación más estables.
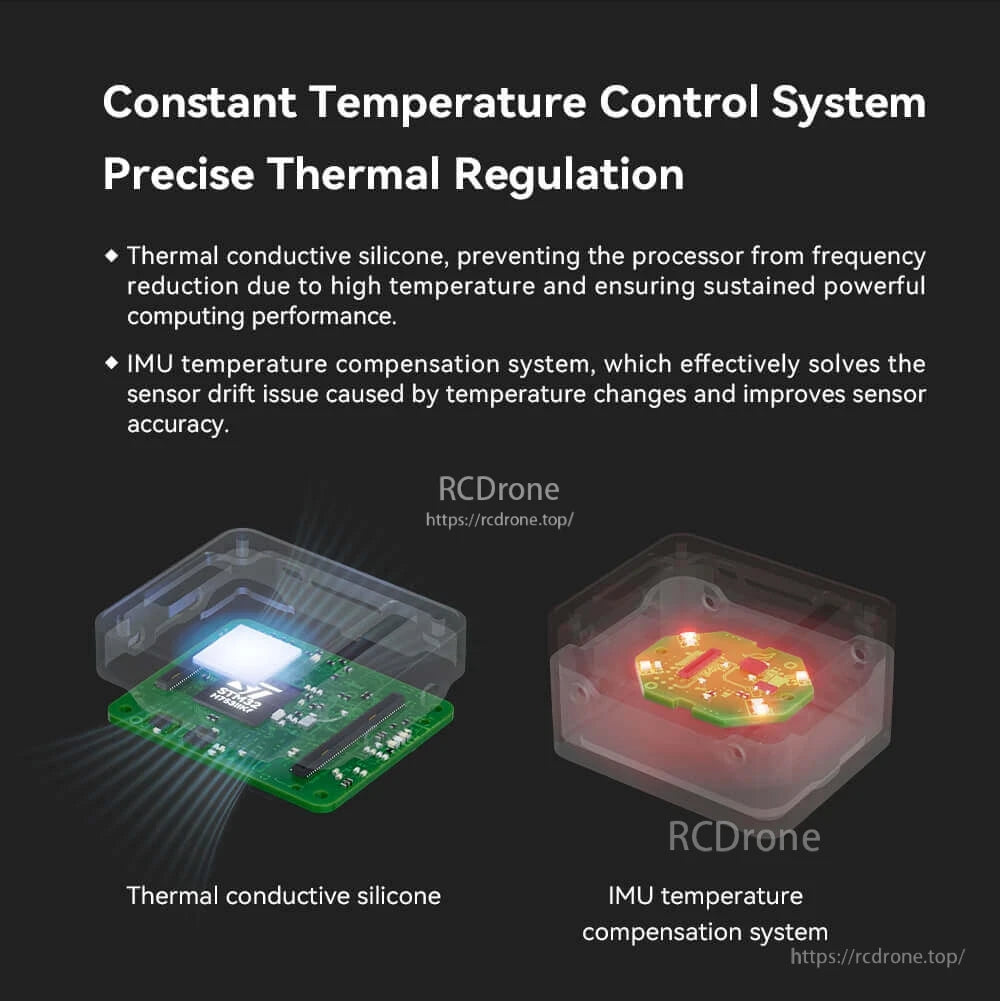
Un sistema de control de temperatura constante utiliza silicona térmicamente conductiva y compensación de temperatura IMU para reducir la deriva relacionada con la temperatura.
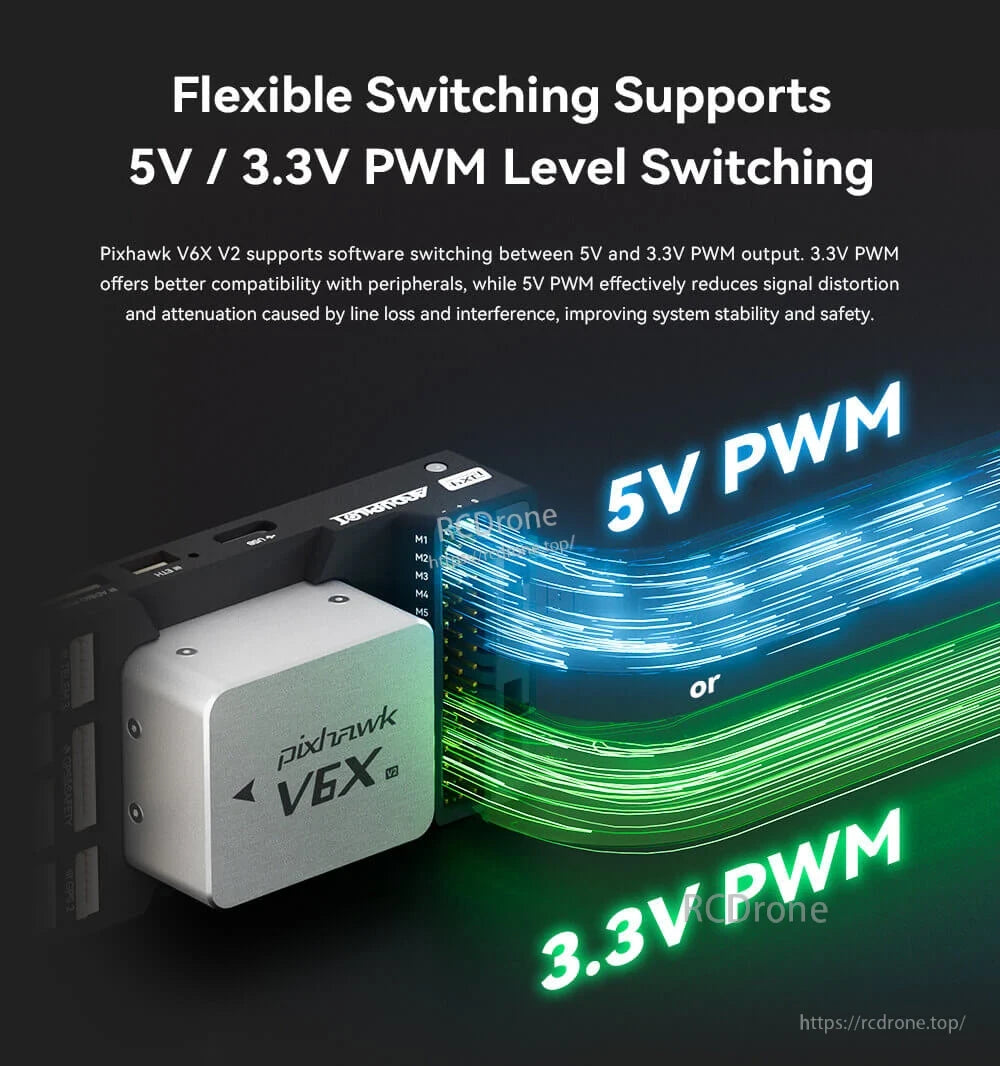
Pixhawk V6X V2 admite un cambio flexible entre niveles de salida PWM de 5V y 3.3V para una mejor compatibilidad con diferentes periféricos.

Pixhawk V6X V2 integra una interfaz Ethernet de 100 Mbps junto con puertos etiquetados como USB, TELEM3, CAN y GPS & Seguridad para un cableado limpio.
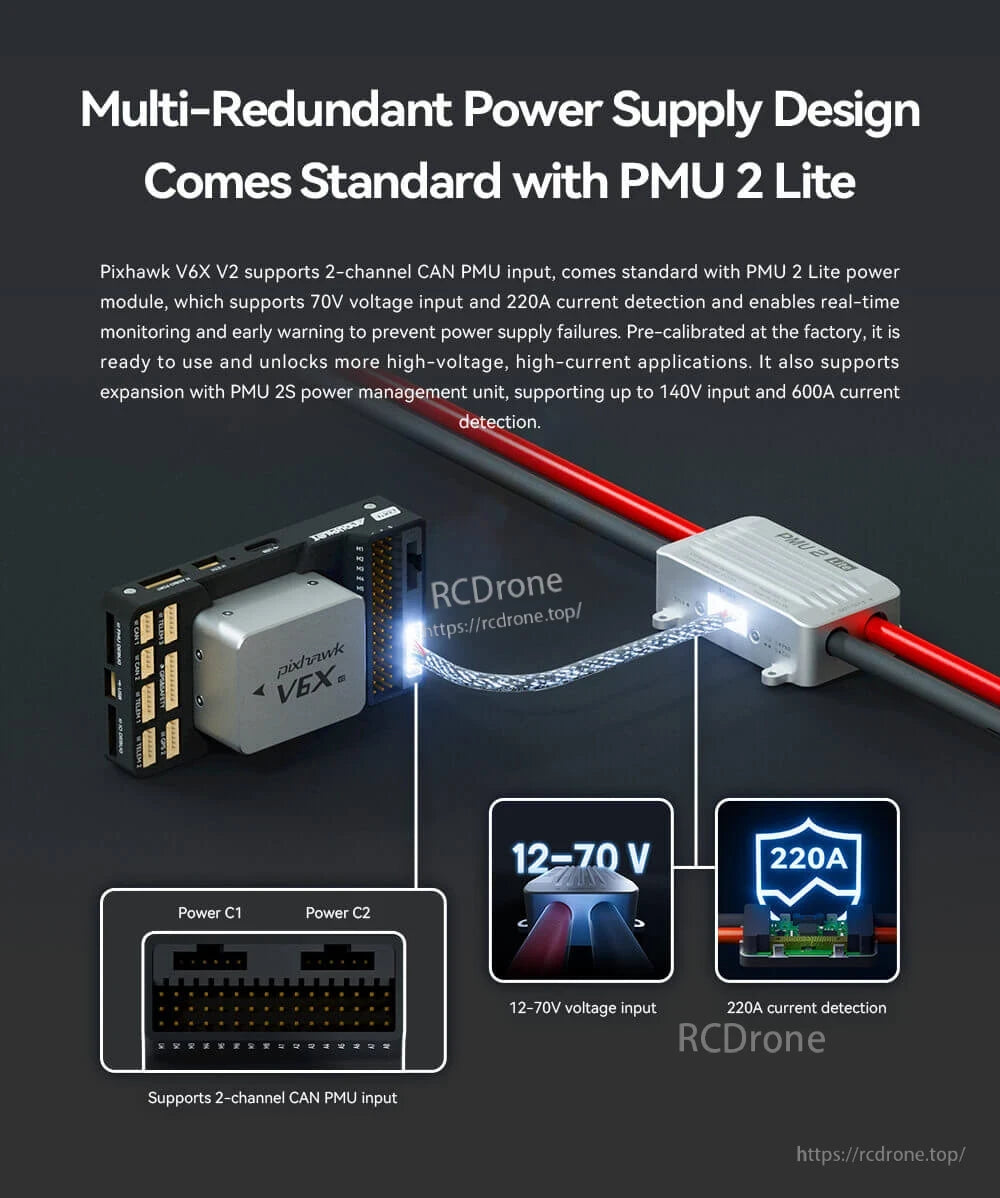
Pixhawk V6X V2 se empareja con el módulo PMU 2 Lite para una entrada de energía multi-redundante, soportando 12–70V y detección de corriente de 220A.

El CUAV Pixhawk V6X V2 utiliza un módulo central modular y desmontable en una placa portadora para simplificar la personalización y el acceso a conectores.
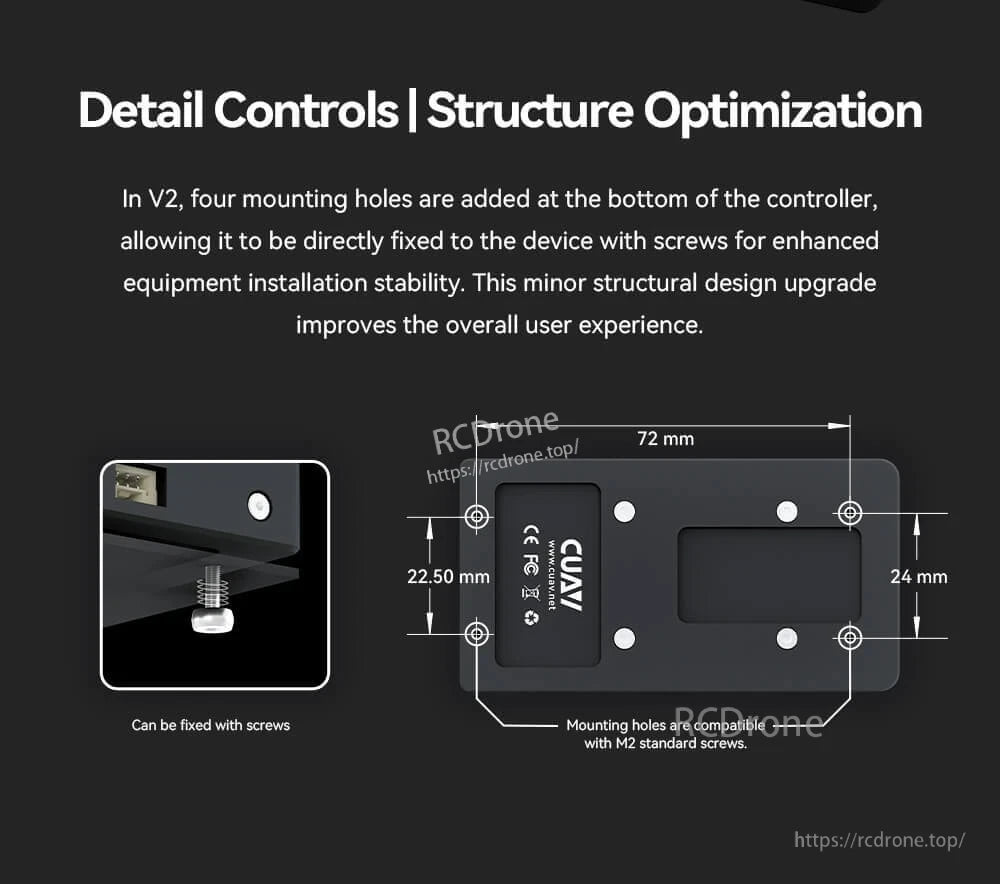
El CUAV Pixhawk V6X V2 añade cuatro orificios de montaje en la parte inferior compatibles con M2 con una huella de 72 mm para una instalación más segura con tornillos.

Pixhawk V6X V2 admite el firmware ArduPilot y PX4 para una variedad de plataformas no tripuladas, incluyendo multirrotores, aviones de ala fija y vehículos terrestres o marinos.
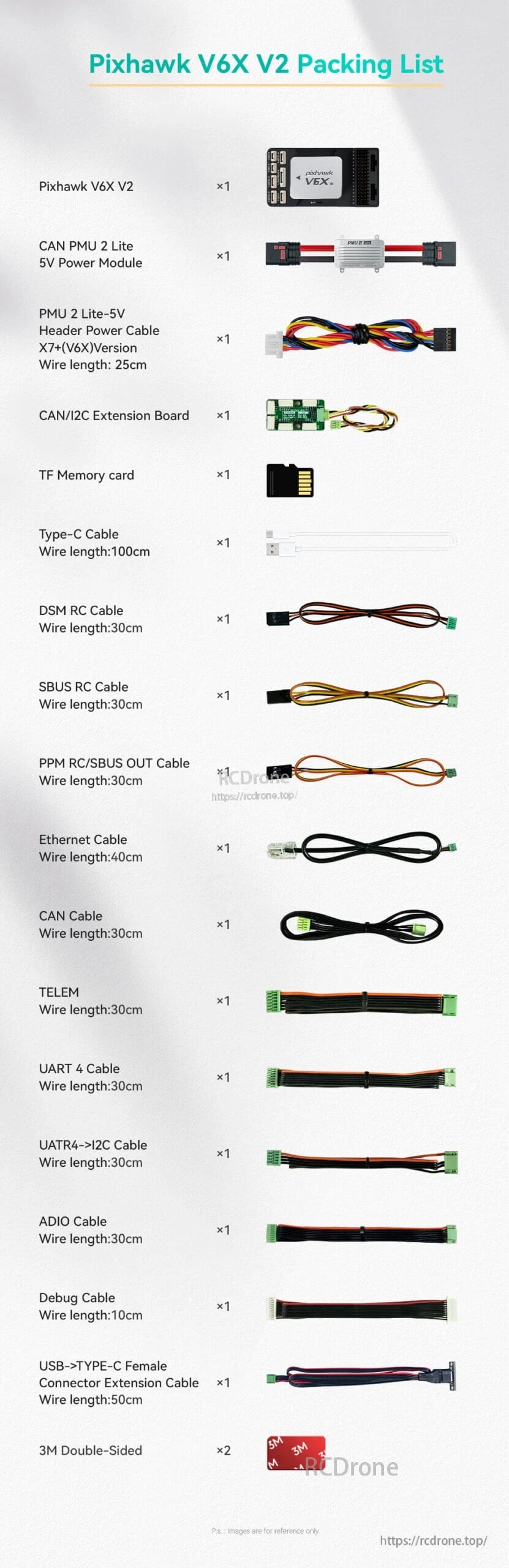
El kit Pixhawk V6X V2 incluye el controlador de vuelo, módulo de potencia CAN PMU 2 Lite 5V, tarjeta de memoria TF y un conjunto de cables Type‑C, RC, Ethernet, CAN, TELEM, UART, ADIO y de depuración.
Related Collections


















