CUAV V5+ Placa portadora Piloto automático Pixhawk Controlador de vuelo - FPV RC Drone Quadcopter Helicóptero VTOL
CUAV V5+ Placa portadora Piloto automático Pixhawk Controlador de vuelo - FPV RC Drone Quadcopter Helicóptero VTOL
CUAV
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES del controlador de vuelo Pixhawk del piloto automático de la placa portadora CUAV V5+
Distancia entre ejes: Placa inferior
Uso: Vehículos y juguetes de control remoto
Piezas/accesorios de mejora: Controlador de vuelo
Suministros de herramientas: Categoría de ensamblaje
Parámetros técnicos: KV1100
Tamaño: 89*42,5*33mm
Dispositivos/periféricos de control remoto: Controlador remoto
Edad recomendada: 14+años
Piezas y accesorios de RC: Controladores de velocidad
Cantidad: 1 pieza
Origen: China continental
Número de modelo: V5+
Material: Metal
Atributos de tracción en las cuatro ruedas: Carcasa/Chasis/Ala/Cabeza
Para tipo de vehículo: Helicópteros
Certificación: CE,FCC
Nombre de marca: CUAV
CUAV V5+ Placa portadora Piloto automático Pixhawk Controlador de vuelo para FPV RC Drone Quadcopter Helicóptero Simulador de vuelo VTOL
V5 + Piloto automático
El V5+ AutoPilot es un piloto automático avanzado para integradores académicos y comerciales. Diseñado por CUAV en colaboración con el equipo de PX4. Basado en el diseño de hardware abierto Pixhawk FMUv5, una placa altamente modular que utiliza pines estándar de Pixhawk para su interfaz externa, lo que permite la integración de la placa portadora. Listo para usar, preinstalado con PX4 Open Source Autopilot y totalmente compatible con ArduPilot.
Resumen rápido
Procesador FMU principal: STM32F765
32 Bit Arm® Cortex®-M7, 216 MHz, 2 MB de memoria, 512 KB de RAM
Procesador de E/S: STM32F100
Arm® Cortex®-M3 de 32 bits, 24 MHz, SRAM de 8 KB
Sensores integrados:
Acelerómetro/Giroscopio: ICM-20689
Acelerómetro/Giroscopio: BMI055
Magnetómetro: IST8310
Barómetro: MS5611
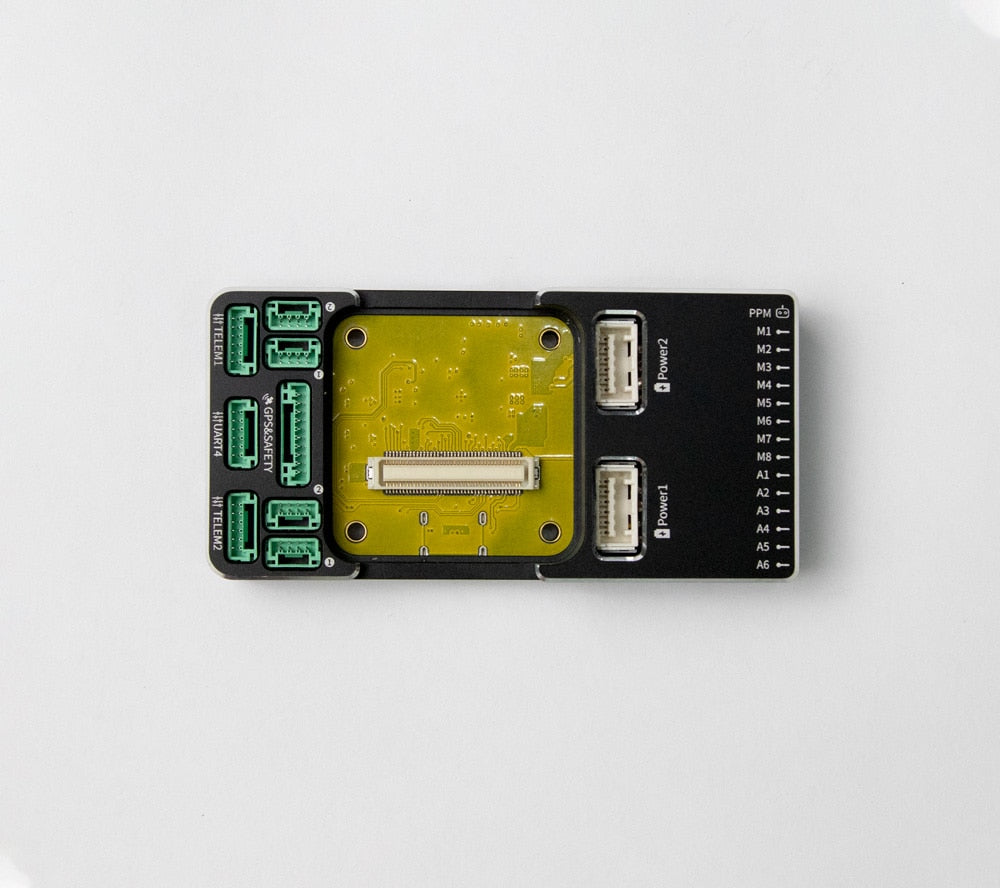
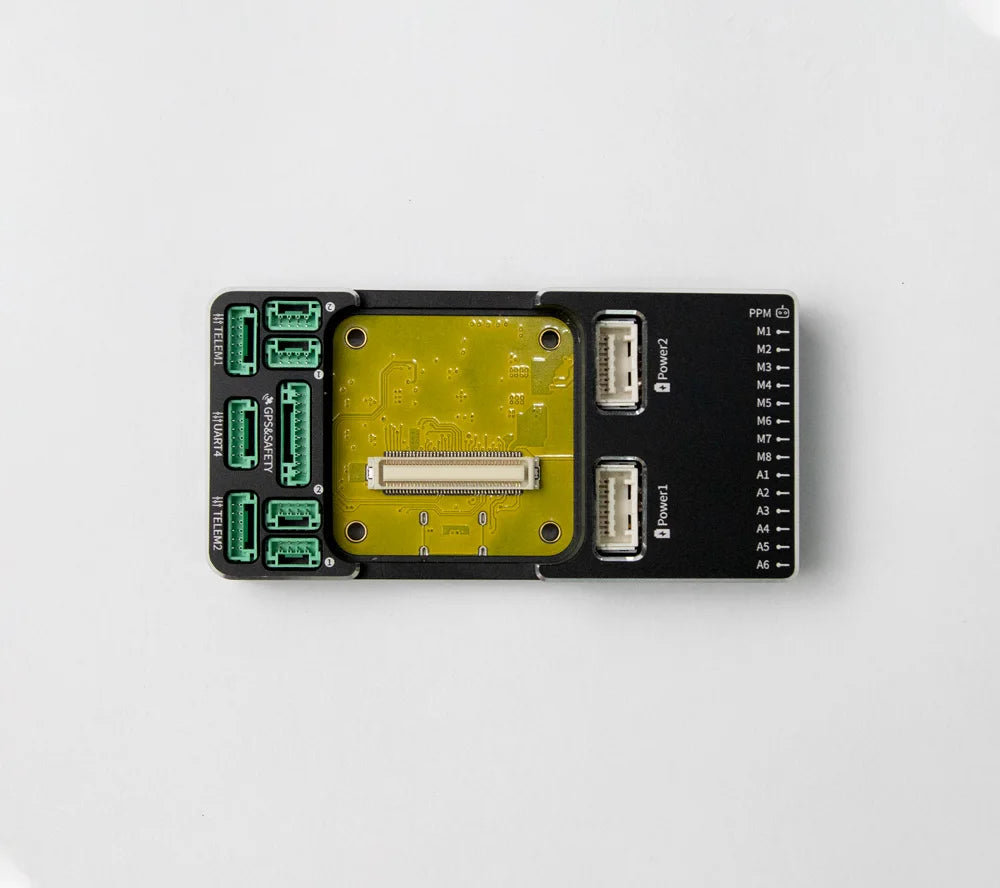
Interfaces:
8-14 salidas PWM (6 de IO, 8 de FMU)
3 entradas PWM/Captura dedicadas en FMU
Entrada R/C dedicada para CPPM
Entrada R/C dedicada para PPM y S.Bus
entrada analógica/PWM RSSI
Salida de servo S.Bus
5 puertos serie de uso general
4 puertos I2C
4 autobuses SPI
2 CANBuses con ESC serie
Entradas analógicas para tensión/corriente de 2 baterías
Sistema de energía:
Potencia: 4,3~5,4V
Entrada USB: 4,75~5,25 V
Entrada de riel de servo: 0~36 V
Peso y dimensiones:

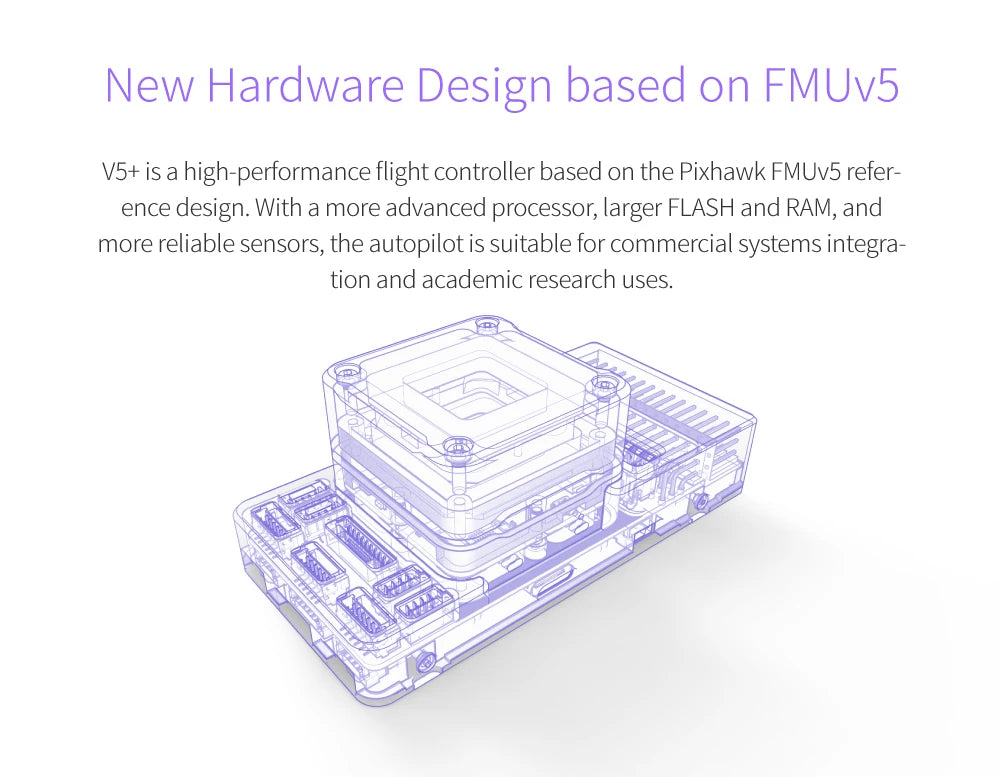
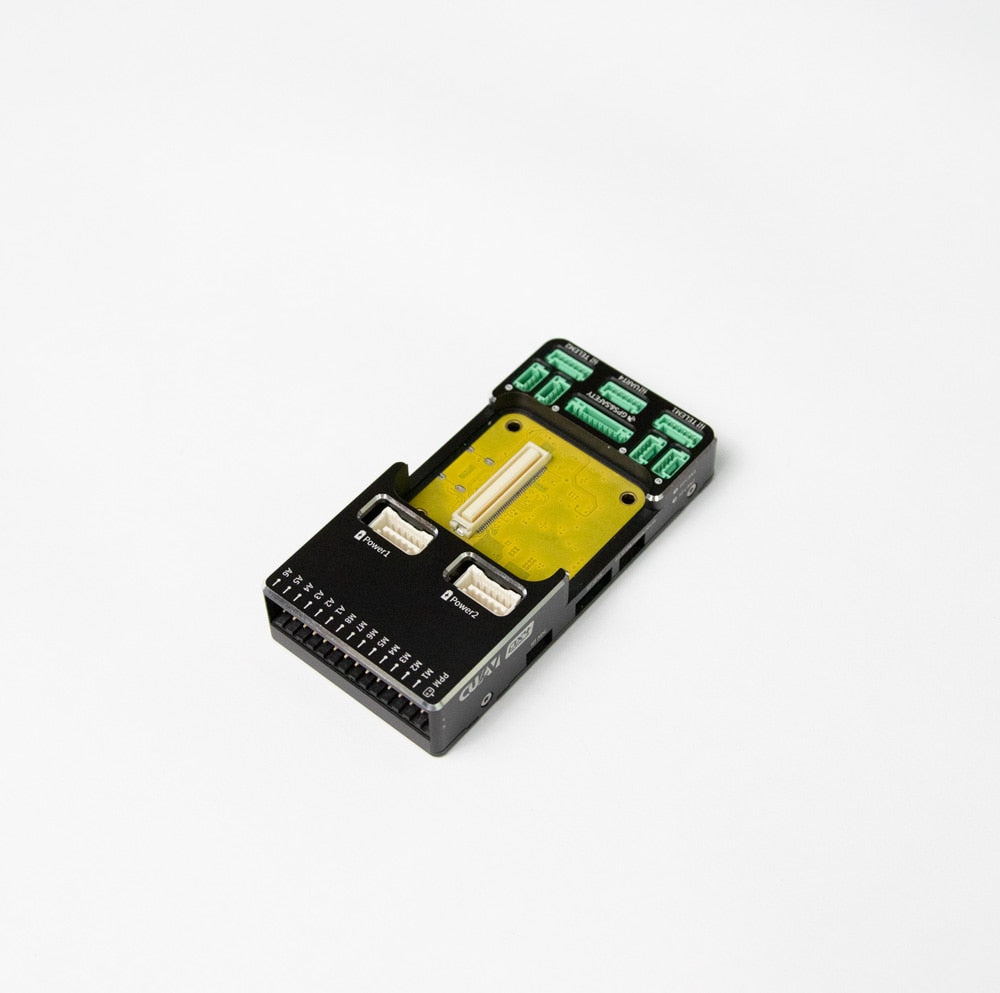
El controlador de vuelo Pixhawk con piloto automático de placa portadora CUAV V5+ es un controlador de vuelo de alto rendimiento basado en el Pixhawk FMUv5 VS+, que presenta un procesador avanzado, mayor capacidad de FLASH y RAM y sensores más confiables. Este piloto automático está diseñado para la integración de sistemas comerciales y aplicaciones de investigación académica.

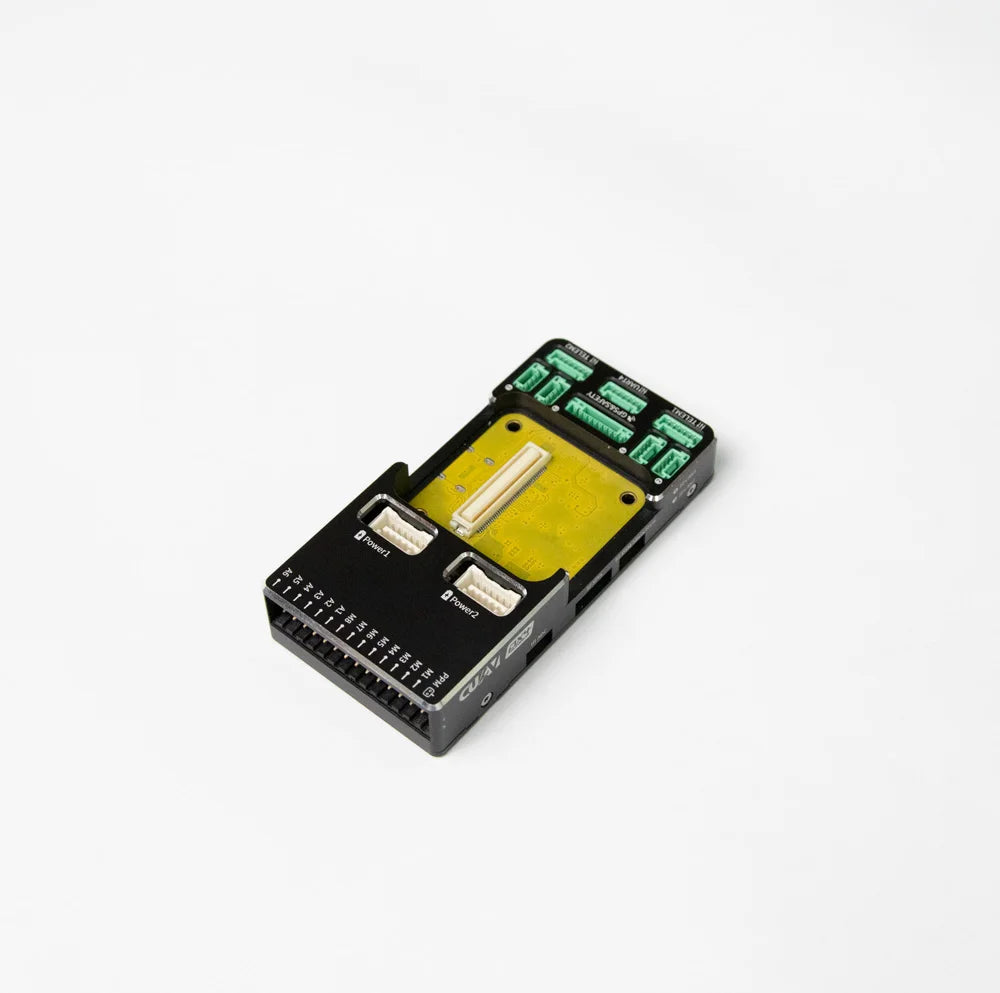
El CUAV V5+ Core Design desmontable presenta un factor de forma modular, lo que permite una fácil integración en varios proyectos.El kit incluye tanto el módulo 'central' como la placa base, que se pueden instalar directamente en la aplicación deseada.
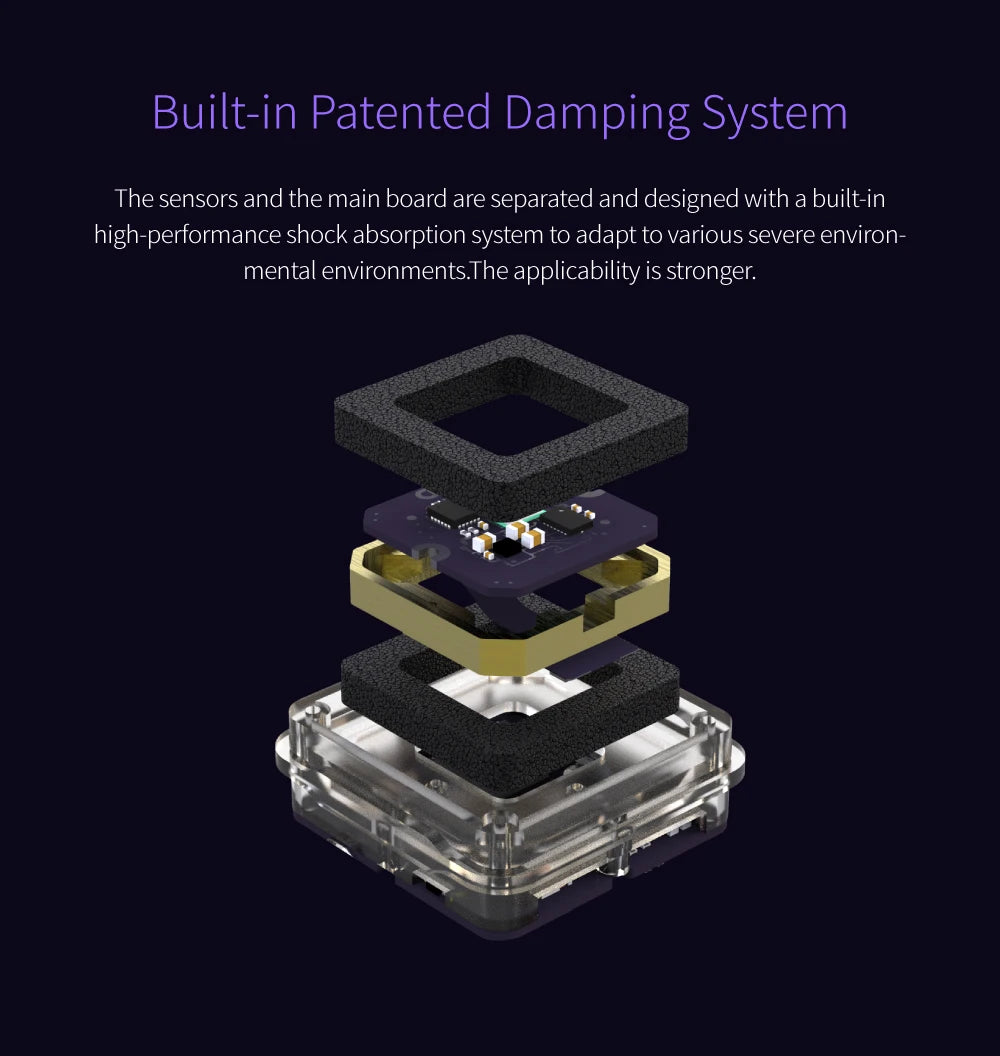
El CUAV V5+ cuenta con un sistema de absorción de impactos incorporado diseñado para soportar diversas condiciones ambientales extremas, proporcionando mayor robustez y confiabilidad.
CUAV es miembro plateado de Dronecode; y comprometido a promover el proyecto de código abierto PX4. Las interfaces iX4 OUTOPiLOt están diseñadas de acuerdo con los estándares oficiales para garantizar la compatibilidad y la interoperabilidad.
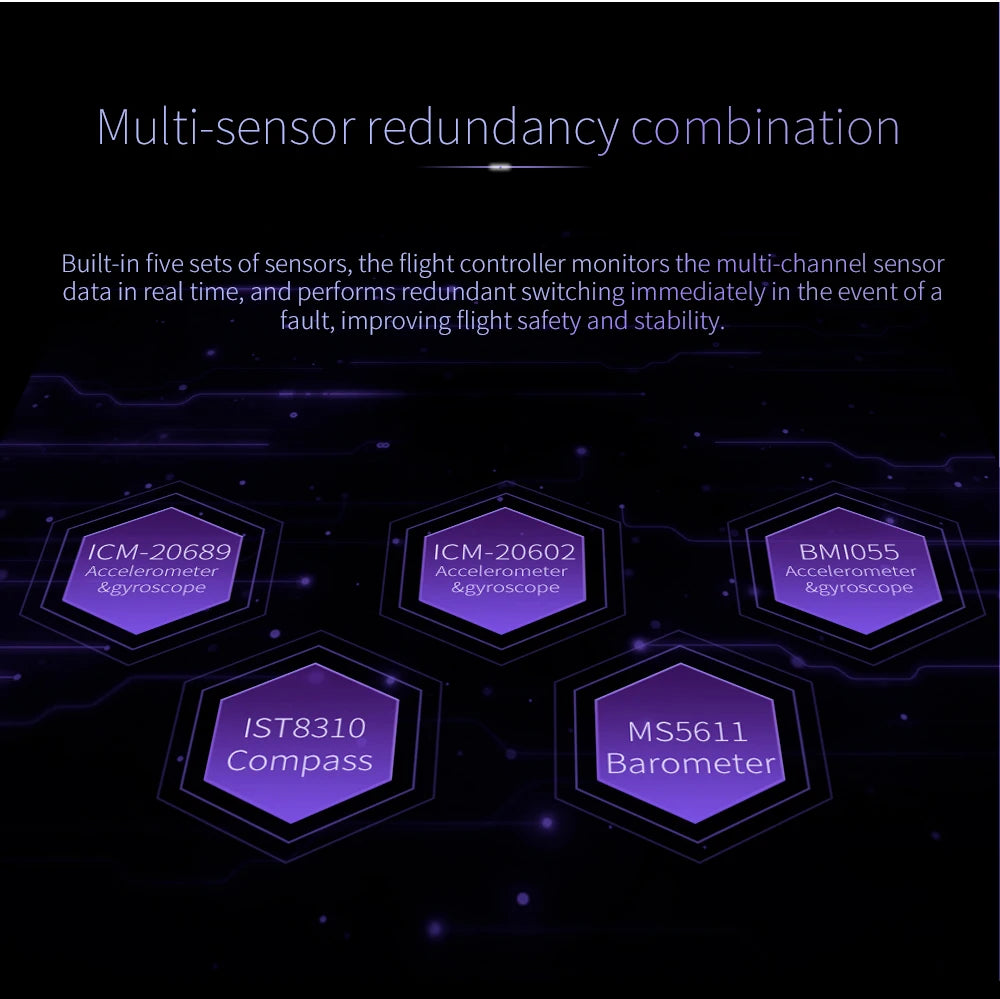
el controlador de vuelo monitorea los datos del sensor multicanal en tiempo real. realiza conmutación redundante inmediatamente en caso de fallo. mejorar la seguridad y estabilidad del vuelo.
VS+ selecciona el procesador STM3ZF 765 más rápido con mejor rendimiento. la velocidad del reloj es mayor; la RAM es mayor; y la velocidad mejorará enormemente.
El controlador de vuelo CUAV V5+ admite posicionamiento cinemático en tiempo real (RTK), lo que permite una navegación precisa a nivel de centímetros y un control de precisión cuando se combina con un módulo RTK (se vende por separado).



¡Estoy muy satisfecho con la alta calidad habitual que espero de esta tienda confiable! El 29 de junio de 2021 a las 5:19 a. m. fue la fecha de mi pedido, y el 1 de julio de 2021 a las 4:17 a. m. llegó a través del envío estándar de AliExpress. Gracias nuevamente por la placa portadora VSPlus, que tiene una construcción sólida y luce excelente en su color NEGRO.
Related Collections