








Controlador de vuelo CUAV X25 EVO - STM32H7, Triple IMU, Doble Barómetro, RM3100, CAN, 16 PWM, PX4/ArduPilot
Controlador de vuelo CUAV X25 EVO - STM32H7, Triple IMU, Doble Barómetro, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV
No se pudo cargar la disponibilidad de retiro
Resumen
CUAV X25 EVO es un controlador central de alta fiabilidad para sistemas no tripulados. Combina un procesador STM32H7 (480 MHz, 2 MB Flash) con un array de IMU industrial triple, barómetros duales y magnetómetros RM3100. Una arquitectura de energía rediseñada soporta 10–18 V de entrada y proporciona hasta 5 V/12 A de salida externa para alimentar cargas pesadas. El controlador integra redundancia de energía de doble vía, protección integral contra ESD/sobre corriente, indicación de estado RGB y un diseño modular CORE/portador. Es compatible con ArduPilot y PX4, y es adecuado para multirrotores, alas fijas, VTOL, helicópteros, UGV/USV/UUV y otras plataformas.
Características Clave
-
Computación de alto rendimiento: STM32H7 @ 480 MHz, 2 MB Flash; bajo uso de CPU para algoritmos avanzados (navegación no GPS, filtros FFT, scripts LUA).
-
Conjunto de sensores industriales:
-
IMUs: 2× TDK IIM-42653 (±4000 °/s, ±32 g) + 1× TDK IIM-42652 (±2000 °/s, ±16 g).
-
Magnetómetros: PNI RM3100 (anti-interferencia).
-
Barómetros: TDK ICP20100 &y Bosch BMP581 (dual).
-
Matriz IMU heterogénea con conmutación tolerante a fallos.
-
-
Sistema de compensación de temperatura dual para el IMU: compensación en tiempo real ±0.5 °C; en comparación con la generación anterior—15% menor deriva de temperatura, 25% mejor consistencia en la solución de actitud.
-
Aislamiento de vibraciones: amortiguación de matriz de nylon simétrica inclinada de 4ª generación; opcionales aisladores de orejas fijas externos para suprimir vibraciones anormales de alta frecuencia y mejorar la fidelidad de los datos.
-
Arquitectura de energía: DC-DC de alta potencia de 5 V/15 A a bordo; el puerto externo soporta 5 V/12 A de salida; rango de entrada 10–18 V.
-
Redes &y buses: bus CAN (batería inteligente/ESC/servos, retroalimentación de telemetría) + 100 M Ethernet.
-
Abundante I/O: hasta 16 PWM a través de puertos de servo; hasta 32 PWM a través de expansión CAN.
-
Ruggedización &y QA: redundancia de energía de doble canal, protección ESD &y sobrecorriente, diseño de conector antiestático, recubrimiento conformal de PCB y pruebas totalmente automatizadas.
-
Indicador de estado RGB: LEDs multicolores para armado, energía, GNSS/posición, modos de falla, etc.
html
Especificaciones
| Categoría | Detalle |
|---|---|
| Procesador | STM32H7 Arm® Cortex®-M7 @ 480 MHz, 2 MB Flash |
| Versión | X25 EVO |
| IMUs | IIM-42653 ×2 (giroscopio ±4000 °/s; acelerómetro ±32 g); IIM-42652 ×1 (giroscopio ±2000 °/s; acelerómetro ±16 g) |
| Magnetómetro | RM3100 |
| Barómetros | TDK ICP20100 / Bosch BMP581 (dual) |
| Salidas PWM | 16 (banco de servos M1–M16) |
| Entradas de energía (CAN) | 2 |
| Puertos GPS | 2 |
| Puertos TELEM | 2 |
| UART4 | 1 |
| Entrada RC | 1 (PPM / SBUS / DSM etc.html ) |
| DEBUG (DSU) | 1 |
| Ethernet | 1 (100 M) |
| CAN | CAN1 ×3, CAN2 ×2 (total 5) |
| expansión SPI6 | 1 |
| ADC | 1× 3V3, 1× 6V6 |
| USB | 1× Tipo-C |
| I²C | 3 |
| RSSI | 1 |
| Módulo de potencia | PMU 2 Lite |
Condiciones de operación &y físicas
| Artículo | Valor |
|---|---|
| Voltaje de entrada (controlador) | 10–18 V |
| USB | 4.75–5.25 V |
| Rango de suministro PMU 2 Lite | 20–70 V |
| Riel externo de 5 V | hasta 12 A de salida (para periféricos/cargas pesadas) |
| Temperatura de funcionamiento | −20 °C a +85 °C |
| Dimensiones | 76.5 × 45.45 × 32.2 mm |
| Peso | 110 g |
Interfaces &y Destacados de Diseño
-
Dual RAIL DE PODER C1/C2, RC IN, Banco de servos M1–M16.
-
Conectores laterales para UART/TELEM, ADC, USB-C (depuración/IO), I²C, CAN1/CAN2, ETH.
-
Núcleo diseñado que se puede desmontar para el desarrollo de placas portadoras personalizadas.
Compatibilidad &y Aplicaciones
-
Firmware: totalmente compatible con ArduPilot y PX4 (controladores &y características).
-
Vehículos: multirrotor, ala fija, VTOL, helicópteros, UGV, USV, UUV/submarino, y otras plataformas no tripuladas.
En la caja (Kit X25 EVO)
-
X25 EVO controlador de vuelo × 1
-
Módulo de potencia CAN PMU2 Lite (15 V) × 1
-
Placa de expansión CAN × 1
-
Cables de datos CAN (35 cm) × 2
-
Cable USB Tipo-C (100 cm) × 1
-
Cables TELEM (30 cm) × 2
-
Cable RSSI (22 cm) × 1
-
Cable RC IN (30 cm) × 1
-
Cable de alimentación del controlador inteligente CAN PMU2 Lite 15 V (30 cm) × 1
Detalles

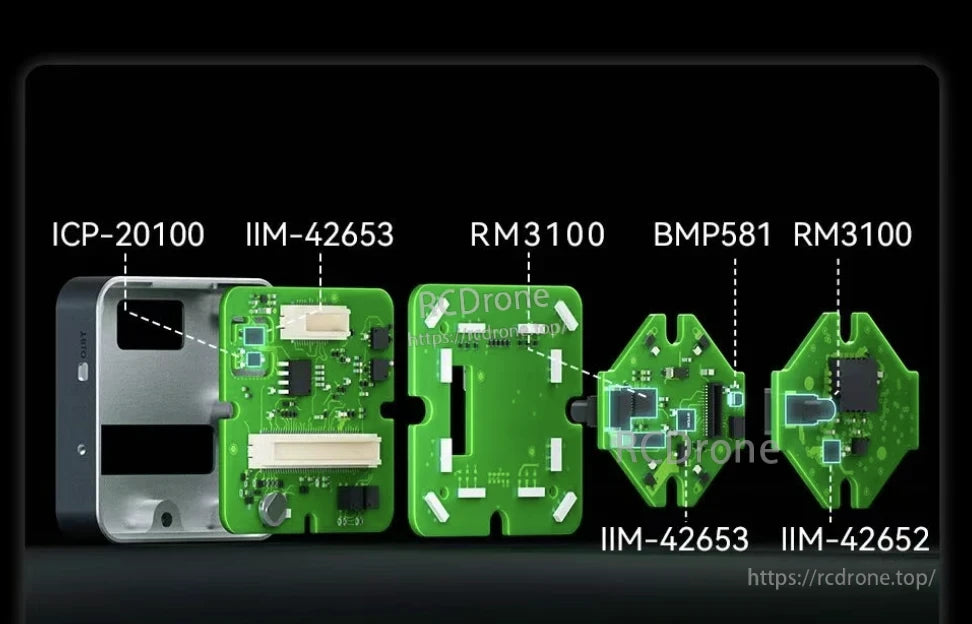
Componentes del controlador de vuelo CUAV X25 EVO etiquetados con modelos de chip.


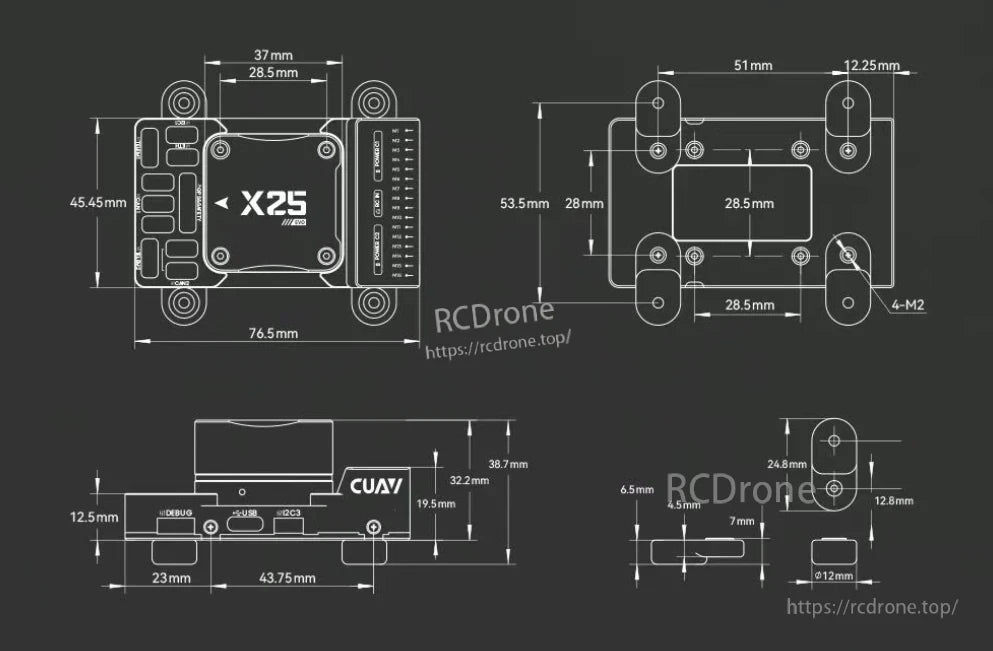
El controlador de vuelo CUAV X25 EVO mide 76.5mm x 45.45mm, cuenta con puertos de depuración, USB y I2C3, e incluye cuatro tornillos M2 para un montaje seguro.

X25 EVO Autopiloto incluye controlador de vuelo, módulo de potencia, placa de expansión CAN, cables de datos y telemetría, cable Type-C, cables RSSI y RC IN, y línea de suministro de energía.
Related Collections








