






CubeMars AK10-9 V2.0 Actuador Robótico KV60/KV100 | Par Nominal 18Nm/15Nm, Doble Codificador, Modos MIT y Servo
CubeMars AK10-9 V2.0 Actuador Robótico KV60/KV100 | Par Nominal 18Nm/15Nm, Doble Codificador, Modos MIT y Servo
CubeMars
No se pudo cargar la disponibilidad de retiro
Descripción
El CubeMars AK10-9 V2.0 es un actuador robótico altamente integrado que combina un motor BLDC de alto rendimiento, un reductor planetario, encoders duales y un controlador integrado en una unidad compacta. Soporta tanto el modo de potencia MIT como el modo de control de servo industrial, ofreciendo un salida de par suave, posicionamiento preciso y respuesta rápida, lo que lo hace ideal para robots bípedos, exoesqueletos y AGVs. Disponible en variantes KV60 y KV100, ofrece hasta 48Nm de par máximo, con dissipación de calor optimizada y monitoreo de temperatura en tiempo real para una fiabilidad a largo plazo.
Características Clave
-
Modos de Control Dual: Soporta el cambio sin problemas entre el modo de potencia MIT y el modo de control de servo para un control de movimiento flexible.
-
Salida de Alto Par: Hasta 48Nm de par máximo con operación estable y bajo retroceso (0.33°).
-
Altamente Integrado: Combina motor, encoder, controlador y reductor planetario en una forma compacta.
-
Salidas & Encoders Internos: Encoders magnéticos integrados de 14 bits internos y 15 bits externos aseguran retroalimentación precisa.
-
Rodamientos de Rodillos Cruzados: Mejora la resistencia a cargas axiales y radiales, mejorando la fiabilidad en aplicaciones dinámicas.
-
Sensor de Temperatura Interno: La monitorización de temperatura en tiempo real previene daños en el motor bajo estrés térmico.
-
Dissipación de Calor Optimizada: El diseño de estructura única mejora la gestión térmica, asegurando una operación estable a largo plazo.
-
Operación Silenciosa: Nivel de ruido tan bajo como 65 dB a 65 cm (versión KV60).
Especificaciones
Especificaciones AK10-9 V2.0 K60
| Aplicación | Robot con patas, Exoesqueleto, AGV | Par máximo (Nm) | 48 |
| Forma de conducción | FOC | Corriente máxima (ADC) | 29.8 |
| Temperatura ambiente de operación | -20℃~50℃ | Kv (rpm/V) | 60 |
| Tipo de bobinado | estrella | Kt (Nm/A) | 0.198 |
| Clase de aislamiento | C | Ke (V/krpm) | 17.2 |
| Aislamiento de alta tensión | 1000V 5mA/2s | Resistencia fase a fase (mΩ) | 195 |
| Resistencia de aislamiento | 1000V 10MΩ | Inductancia fase a fase (μH) | 181 |
| Fase | 3 | Inercia (gcm²) | 1002 |
| Pares de polos | 21 | Km (Nm/√W) | 0.45 |
| Relación de reducción | 9:1 | Constante de tiempo mecánica (ms) | 0.5 |
| Retroceso (Nm) | 0.8 | Constante de tiempo eléctrica (ms) | 0.93 |
| Juego (°) | 0.33 | Peso (g) | 960 |
| Sensor de temperatura | NTC MF51B 103F3950 | Relación de par máximo a peso (Nm/kg) | 50 |
| Ruido dB a 65 cm del motor | 65 | Conector CAN | A1257WR-S-4P |
| Clasificaciones de carga básica (din. C ) N | 2000 | Conector UART | A1257WR-S-3P |
| Clasificaciones de carga básica (stat.C0) N | 2520 | Conector de potencia | XT30PW-M |
| Tensión nominal (V) | 24/48 | Tipo de encoder de bucle interno | Encoder magnético |
| Par nominal (Nm) | 18 | Resolución del encoder de anillo interno | 14bit |
| Velocidad nominal (rpm) | 109/228 | Tipo de encoder de anillo externo | Encoder magnético |
| Corriente nominal (ADC) | 10.6 | Resolución del encoder de anillo externo | 15bit |
AK10-9 V2.0 KV100 Especificaciones
| Aplicación | Robot con patas, Exoesqueleto, AGV | Par máximo (Nm) | 38 |
| Forma de conducción | FOC | Corriente máxima (ADC) | 41.2 |
| Temperatura ambiente de operación | -20℃~50℃ | Kv (rpm/V) | 100 |
| Tipo de bobinado | Delta | Kt (Nm/A) | 0.114 |
| Clase de aislamiento | C | Ke (V/krpm) | 9.9 |
| Aislamiento de alta tensión | 1000V 5mA/2s | Resistencia fase a fase (mΩ) | 65.5 |
| Resistencia de aislamiento | 1000V10MΩ | Inductancia de fase a fase (μH) | 60 |
| Fase | 3 | Inercia (gcm²) | 1002 |
| Pares de polos | 21 | Km (Nm/√W) | 0.45 |
| Relación de reducción | 9:1 | Constante de tiempo mecánica (ms) | 0.51 |
| Retroceso (Nm) | 0.8 | Constante de tiempo eléctrica (ms) | 0.92 |
| Juego (°) | 0.33 | Peso (g) | 960 |
| Sensor de temperatura | NTC MF51B 103F3950 | Relación de peso de par máximo (Nm/kg) | 39.6 |
| Nivel de ruido dB a 65CM del motor | 70 | Conector CAN | A1257WR-S-4P |
| Clasificaciones de carga básica (dyn. C) N | 2000 | Conector UART | A1257WR-S-3P |
| Clasificaciones de carga básica (stat.C0) N | 2520 | Conector de potencia | XT30PW-M |
| Tensión nominal (V) | 24/48 | Tipo de encoder de bucle interno | Encoder magnético |
| Par nominal (Nm) | 15 | Resolución del encoder de anillo interno | 14bit |
| Velocidad nominal (rpm) | 205/421 | Tipo de encoder de anillo externo | Encoder magnético |
| Corriente nominal (ADC) | 16.2 | Resolución del codificador de anillo exterior | 15bit |
| Número de codificadores | 2 |
Aplicaciones
-
Robots bípedos
-
Exoesqueletos para rehabilitación o carga
-
Vehículos terrestres autónomos (AGV)
-
Sistemas de control de par en las articulaciones
-
Robótica humanoide y cuadrúpedo
Descargas
![]() Manual de control y driver de la serie AK v1.0.15.X.pdf
Manual de control y driver de la serie AK v1.0.15.X.pdf
Detalles
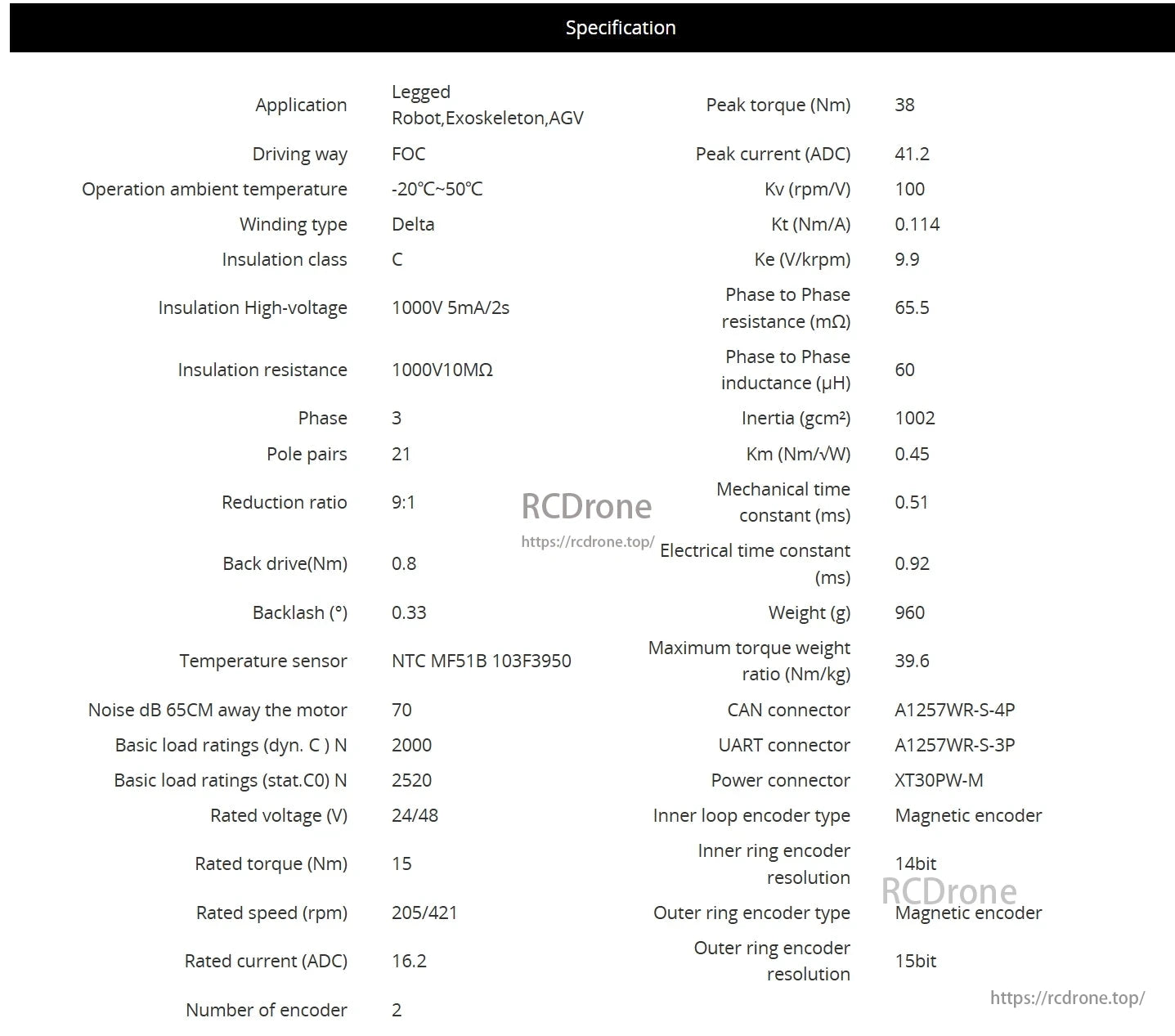
Actuador robótico CubeMars AK10: 38 Nm de par máximo, 41.2 ADC de corriente pico, operación de -20°C a 50°C, relación de reducción 9:1, peso de 960g, relación de par máximo a peso de 39.6 Nm/kg, ruido de 70 dB, encoders magnéticos, conectores CAN y UART.

Actuador Robótico CubeMars AK10: 48 Nm de par pico, 29.8 A de corriente pico, operación de -20°C a 50°C, aislamiento de 1000V, 3 fases, 21 pares de polos, relación de reducción 9:1, peso de 960g, relación de par máximo a peso de 50 Nm/kg, encoders magnéticos.

Gráfico de Análisis para CubeMars AK10-9 V2.0 KV60@48VDC actuator. Muestra la potencia de salida (W), eficiencia, corriente (A) y velocidad (RPM) en función del par (N.m). La eficiencia alcanza su punto máximo alrededor de 12 N.m, mientras que la potencia de salida aumenta de manera constante con el par. La corriente aumenta linealmente y la velocidad disminuye a medida que aumenta el par. El gráfico destaca las características de rendimiento del actuador, demostrando su capacidad bajo diferentes cargas.Los indicadores clave incluyen una potencia de salida máxima que supera los 800 W y una velocidad operativa de hasta 350 RPM a bajos torques. Estos datos ayudan a comprender la eficiencia del actuador y la dinámica de potencia en diferentes aplicaciones.
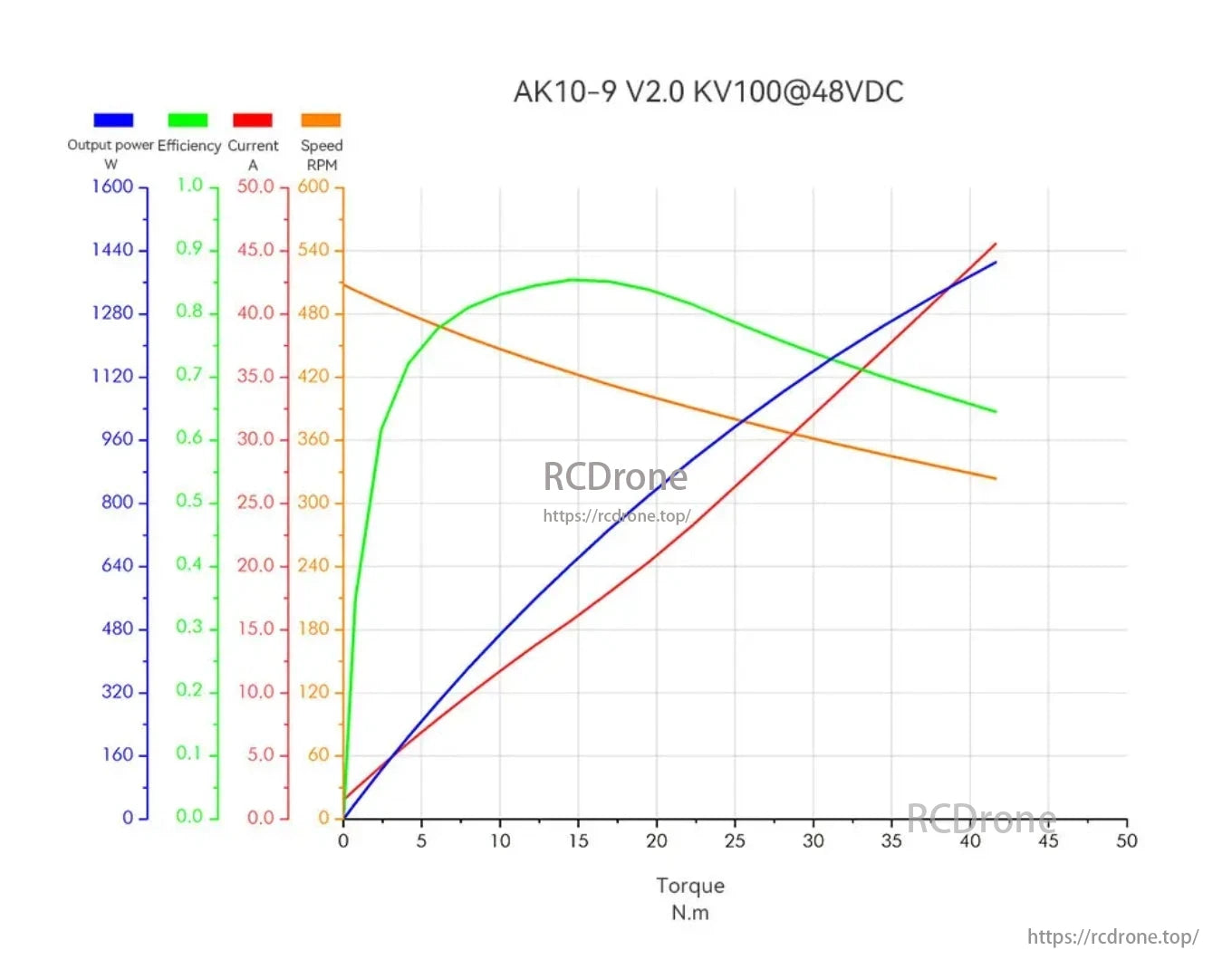
El rendimiento del CubeMars AK10-9 V2.0 KV100@48VDC actu se representa. La potencia de salida (W), la eficiencia, la corriente (A) y la velocidad (RPM) se grafican en función del torque (N.m). La eficiencia alcanza su punto máximo alrededor de 15 N.m, mientras que la potencia de salida aumenta linealmente con el torque. La corriente también aumenta de manera constante con el torque. La velocidad disminuye a medida que aumenta el torque, comenzando en aproximadamente 480 RPM con torque cero. El gráfico ilustra los puntos de operación óptimos para diversas aplicaciones, destacando las capacidades del actuador bajo diferentes condiciones de carga. Estos datos ayudan a seleccionar configuraciones apropiadas para tareas específicas.

Servo de potencia integrado CubeMars AK10-9 KV60, modos incluidos. Actuador robótico con FCC, CE, RoHS V2.0 certificación.

El Actuador Robótico ofrece un control de motor eficiente, un modo de potencia preciso y una respuesta más rápida para aplicaciones industriales.

El Actuador Robótico CubeMars AK10 incluye un motor BLDC de alto rendimiento, un rodamiento de rodillos cruzados de grado industrial, un sensor de temperatura, un codificador de salida, un modo de control dual y un reductor planetario para un par estable.

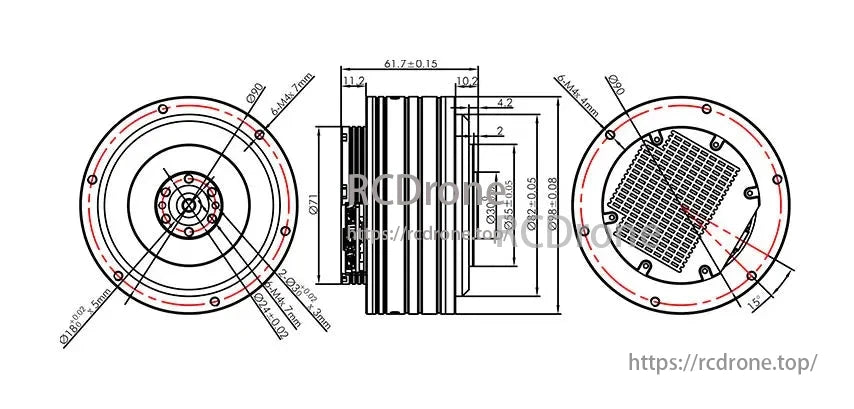
Optimice la estructura y la radiación de calor rápidamente. Mejore la disipación de calor de la carcasa del motor para una mayor durabilidad y estabilidad en el rendimiento del módulo de accionamiento. SN: 1010921081.
Related Collections






