





Actuador Robótico CubeMars AK80-64 KV80 – Par Máximo de 120Nm, Relación de Engranaje 64:1, Modo MIT
Actuador Robótico CubeMars AK80-64 KV80 – Par Máximo de 120Nm, Relación de Engranaje 64:1, Modo MIT
CubeMars
No se pudo cargar la disponibilidad de retiro
Descripción
El CubeMars AK80-64 KV80 Actuador Robótico es una unidad de potencia altamente integrada diseñada para robots bípedos, exoesqueletos y AGVs. Con un potente par nominal de 48Nm y par máximo de 120Nm, este actuador combina un motor DC sin escobillas, reductor planetario de 64:1 desarrollado internamente, encoder magnético de 14 bits, y control FOC integrado en un formato compacto. Soporta voltaje de 6–12S, modos de control MIT y servo, y autoajuste PID, el AK80-64 permite un control de movimiento preciso y eficiente en aplicaciones de alta carga.
Características Clave
-
Salida de Alto Par: 48Nm nominal, 120Nm de par máximo
-
Drive Integrado y Encoder: Simplifica el diseño del sistema
-
Reductor Planetario 64:1: Alta reducción para una salida potente
-
Modo de Control MIT: Control suave de posición, velocidad y aceleración
-
Amplio Soporte de Voltaje: Compatible con sistemas de 24V o 48V (6–12S LiPo)
-
Compacto y Ligero: Solo 850g, alta relación par-peso
-
Comunicación: CAN y UART con conector de alimentación XT30PW-M
-
Bajo Ruido: ≤60 dB a 65cm de distancia
Especificaciones
| Aplicación | Robot con patas, Exoesqueleto, AGV | Par máximo (Nm) | 120 |
| Método de conducción | FOC | Corriente máxima (ADC) | 19 |
| Temperatura ambiente de operación | -20℃~50℃ | Kv (rpm/V) | 80 |
| Tipo de bobinado | Delta | Kt (Nm/A) | 0.136 |
| Clase de aislamiento | H | Ke (V/krpm) | 13.7 |
| Aislamiento de alta tensión | 1000V 5mA/2s | Resistencia fase a fase (mΩ) | 220 |
| Resistencia de aislamiento | 1000V10MΩ | Inductancia fase a fase (μH) | 133.5 |
| Fase | Tres fases | Inercia (gcm²) | 564.5 |
| Pares de polos | 21 | Km (Nm/√W) | 0.29 |
| Relación de reducción | 64:1 | Constante de tiempo mecánica (ms) | 0.67 |
| Retroceso (Nm) | 4.7 | Constante de tiempo eléctrica (ms) | 0.61 |
| Juego (°) | 0.18 | Peso (g) | 850 |
| Sensor de temperatura | NTC MF51B 103F3950 | Relación de peso de par máximo (Nm/kg) | 141.2 |
| Ruido dB a 65 cm del motor | 60 | Conector CAN | A1257WR-S-4P |
| Clasificaciones de carga básica (din. C ) N | 2000 | Conector UART | A1257WR-S-3P |
| Clasificaciones de carga básica (stat.C0) N | 2520 | Conector de potencia | XT30PW-M |
| Tensión nominal (V) | 24/48 | Tipo de encoder de bucle interno | Encoder magnético |
| Par nominal (Nm) | 48 | Resolución del encoder de anillo interno | 14bit |
| Velocidad nominal (rpm) | 23/48 | Tipo de encoder de anillo externo | - |
| Corriente nominal (ADC) | 7 | Resolución del encoder de anillo externo | - |
| Número de encoder | 1 |
Aplicaciones
-
Robots con patas: Locomoción humanoide y cuadrúpedo
Exoesqueletos: Robótica asistencial y de rehabilitación
-
AGVs: Control de motor de precisión en vehículos guiados automatizados
-
Brazos Robóticos: Aplicaciones industriales y colaborativas que requieren alto par y precisión
Detalles
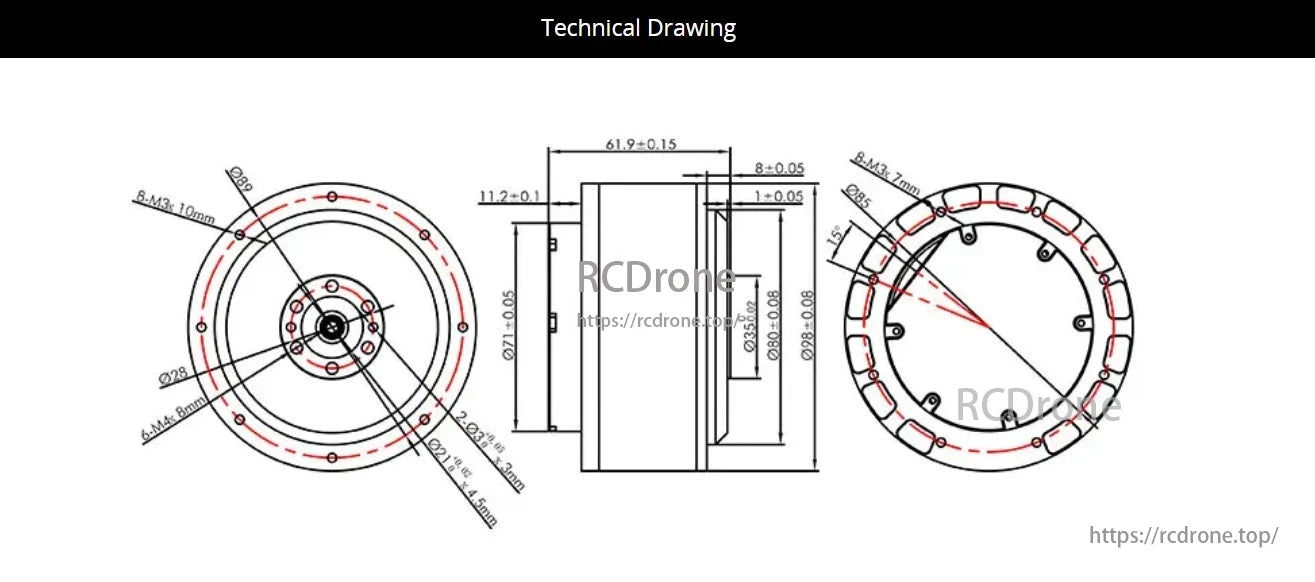
Dibujo técnico del Robot CubeMars AK80 con dimensiones y especificaciones.
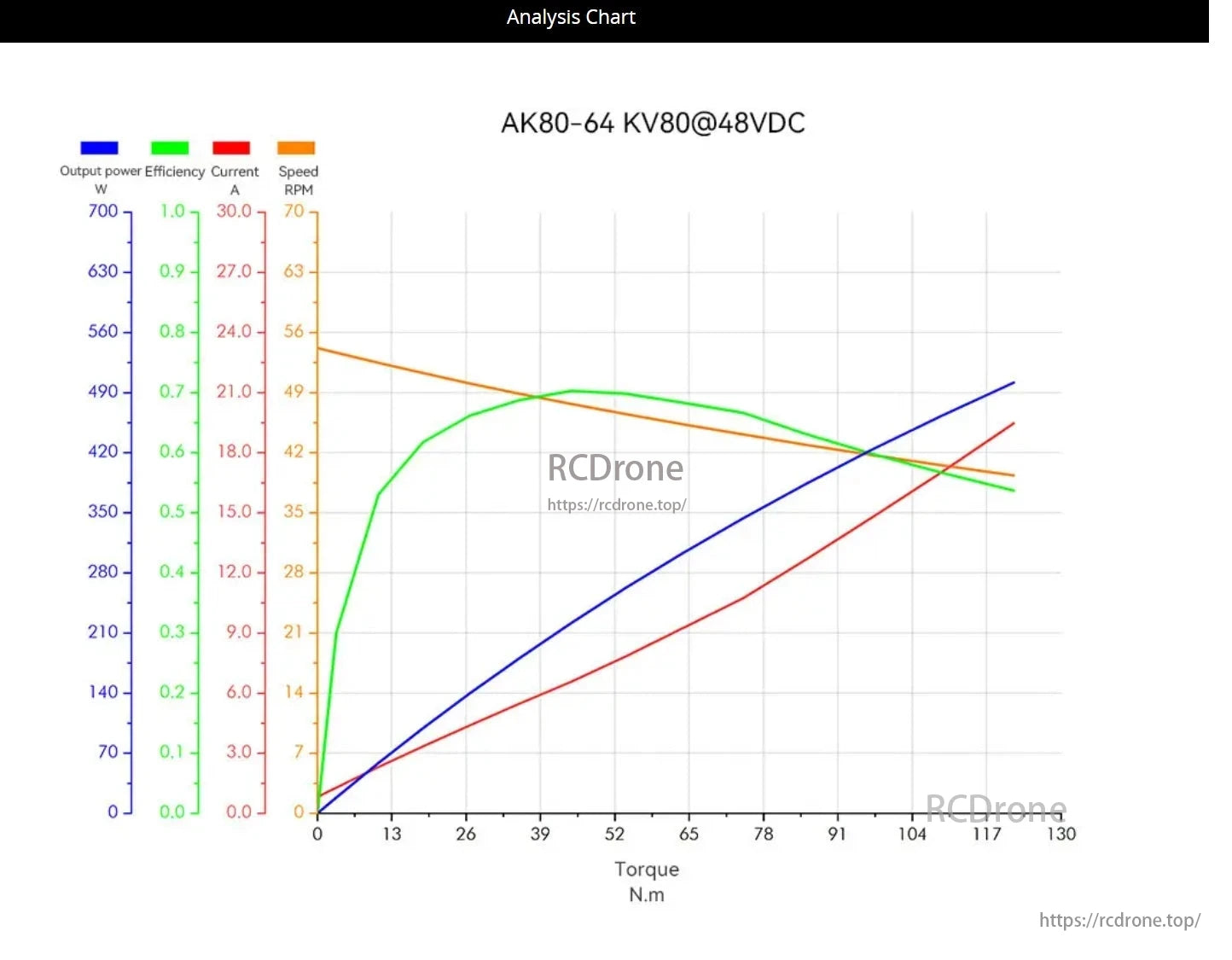
Gráfico de análisis para CubeMars AK80-64 KV80@48VDC. Dispmuestra la eficiencia de potencia de salida, corriente y velocidad en función del par en N.m. La eficiencia alcanza su punto máximo en 0.7 cerca de 52 N.m. La corriente aumenta linealmente con el par. La velocidad disminuye a medida que aumenta el par, comenzando en 56 RPM. La potencia de salida crece de manera constante con el par. El gráfico utiliza líneas azules, verdes, rojas y naranjas para mayor claridad, con ejes etiquetados en vatios, amperios, RPM y N.m. Los datos ilustran las características de rendimiento del motor bajo diferentes cargas.

CubeMars AK80-64KV80: Módulo dinámico de alta integración y dos en uno para robótica.

Motor AK80-64KV80: alta integración, ultra ligero, eficiente, diseño dinámico.

Funcionamiento de bajo ruido, gran potencia. Menor par de arrastre, funcionamiento suave, control de alta resolución y alta precisión con 0.1°.
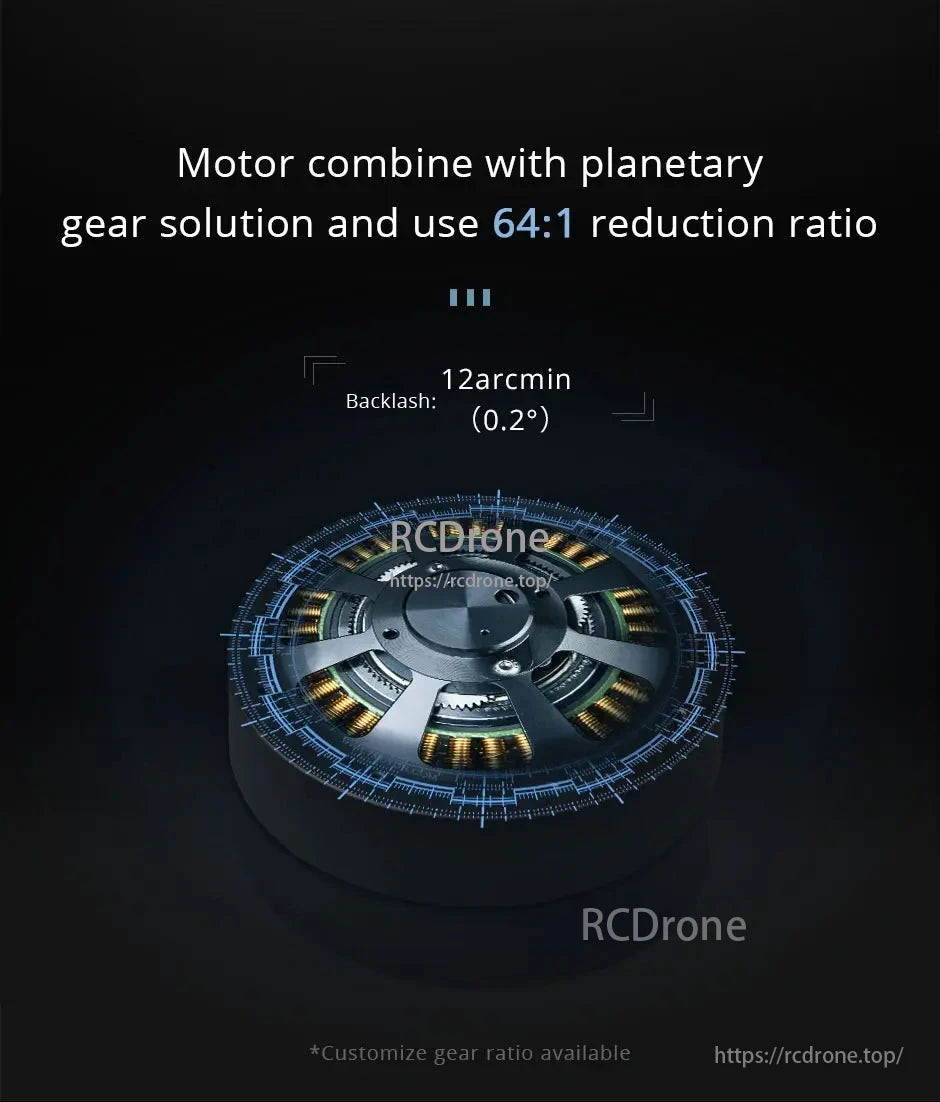
Motor con engranaje planetario, relación 64:1, retroceso de 12 arcmin.
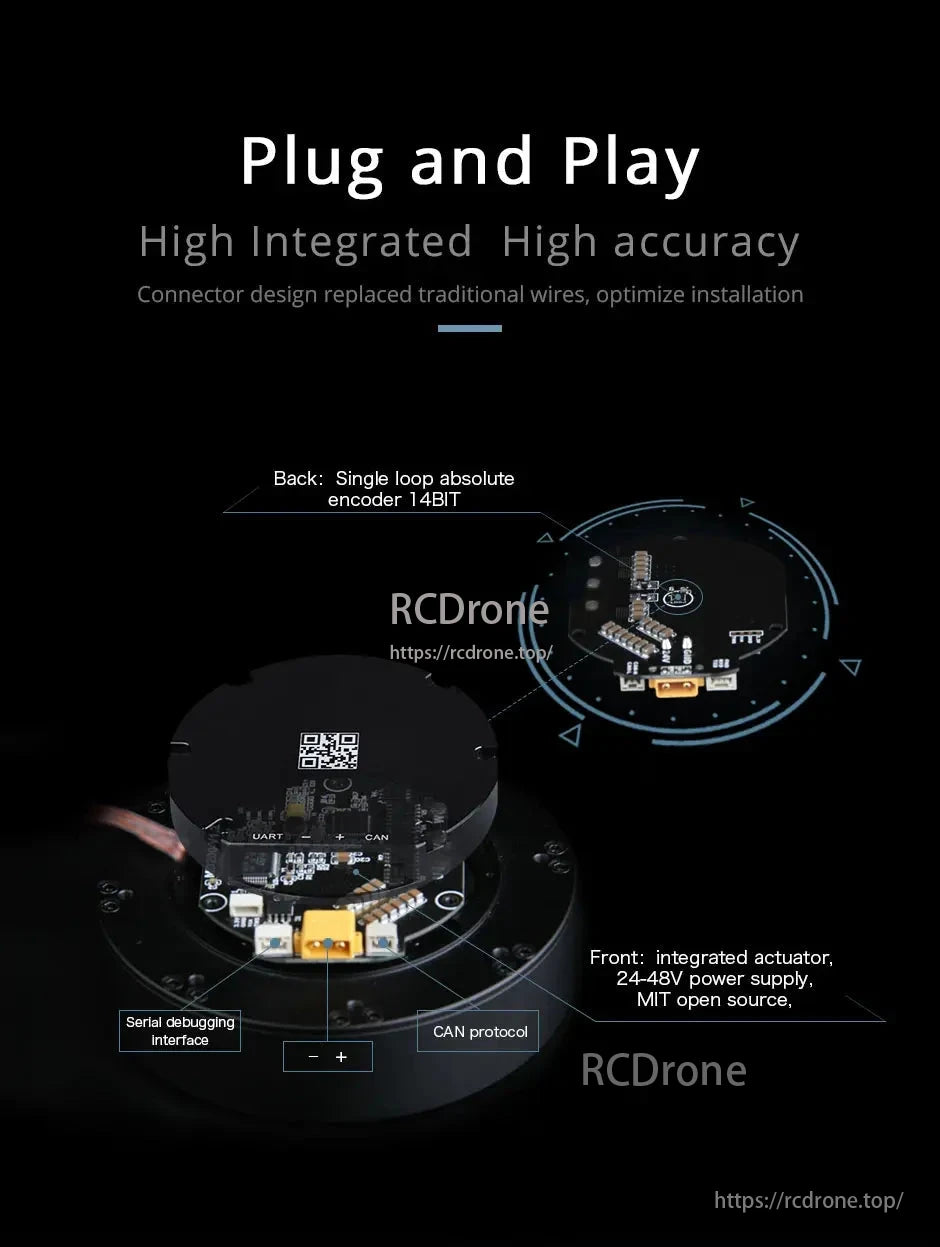
Módulo robótico de alta integración, plug-and-play, preciso, con codificador de bucle simple, actuador integrado, alimentación de 24-48V, protocolo CAN y depuración serial.

Related Collections





