




Actuador robótico CubeMars AKA60-6 KV80 para AGV y robot con ruedas, 3Nm de par, alta carga radial 18kg
Actuador robótico CubeMars AKA60-6 KV80 para AGV y robot con ruedas, 3Nm de par, alta carga radial 18kg
CubeMars
No se pudo cargar la disponibilidad de retiro
Descripción
El CubeMars AKA60-6 KV80 Actuador Robótico es una solución de alta rendimiento de accionamiento cuasi-directo diseñada para AGVs y robots con ruedas que requieren alta capacidad de carga radial e integración compacta. Con un torque nominal de 3Nm, torque máximo de 9Nm, y capacidad de carga radial de hasta 18kg, este actuador ofrece una mejora del 52% sobre el modelo AK60-6 bajo las mismas condiciones de torque. Operando a 24V o 48V, garantiza un rendimiento estable en entornos difíciles que van de -20℃ a 50℃.
Características Clave
-
Alta Capacidad de Carga Radial: Estructura reforzada que soporta hasta 18kg de carga radial, ideal para aplicaciones con ruedas.
-
Conector de Potencia y Señal Integrado: Conector duradero 2+5PIN que combina líneas de potencia y señales CAN/UART, asegurado con tornillos M2 para una conexión estable.
-
Diseño de Motor Mejorado: Optimizado para un funcionamiento más suave, mayor durabilidad y una vida útil más larga.
-
Ajuste de Parámetros Fácil: Soporta configuraciones de velocidad en baudios UART y reconocimiento de parámetros del motor con un solo clic, lo que permite una depuración rápida sin necesidad de flashear el firmware.
Especificaciones
Parámetros Mecánicos
| Parámetro | Valor |
|---|---|
| Relación de Reducción | 6:1 |
| Pares de Polos | 14 |
| Inercia del Rotor | 331.91 g·cm² |
| Peso | 460g |
| Temperatura de operación. Range | -20℃ ~ 50℃ |
| Capacidad de Carga Radial | 18kg |
| Clase de Aislamiento | H |
| Resistencia de Aislamiento | ≥10 MΩ |
| Resistencia a Alta Tensión | 500V |
| Tipo de Bobinado | Estrella |
Parámetros Eléctricos
| Parámetro | Valor |
|---|---|
| Tensión Nominal | 24V / 48V |
| Par de Giro Nominal | 3Nm |
| Par de Giro Máximo | 9Nm |
| Velocidad Nominal | 200rpm / 400rpm |
| Velocidad Sin Carga | 320rpm / 640rpm |
| Corriente Nominal | 4A |
| Corriente Máxima | 11.2A |
| Resistencia de Fase | 595mΩ |
| Inductancia de Fase | 675μH |
| Constante de Tiempo Eléctrico | 1.13ms |
| Constante de Tiempo Mecánico | 2.5ms |
| Kt (Constante de Par) | 0.11937 Nm/A |
| Kv (Constante de Velocidad) | 80 rpm/V |
| Ke (Constante de EMF de Retroceso) | 0.0125 V/krpm |
| Km (Constante del Motor) | 0.1541 Nm/√W |
Aplicaciones
-
Vehículos Guiados Automáticamente (AGVs)
-
Robots móviles con ruedas
-
Sistemas robóticos que requieren densa alta de par y soporte radial duradero
Descargas Manuales
![]() Manual del Producto del Módulo de la Serie AKA V3.0.0.pdf
Manual del Producto del Módulo de la Serie AKA V3.0.0.pdf
Detalles
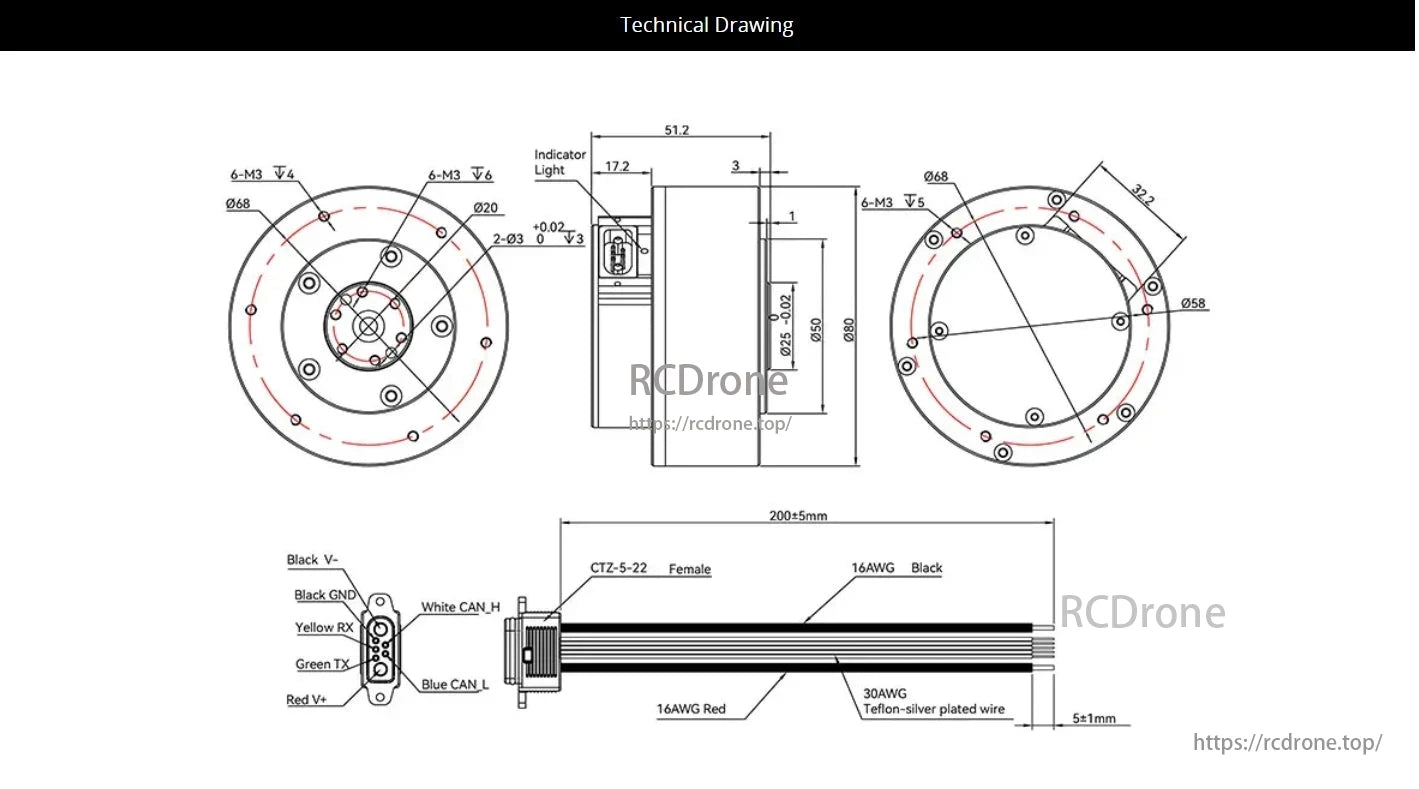
El actuador robótico CubeMars AKA60-6 tiene un diseño compacto de 51.2 x 80 mm con seis orificios de montaje M3, una luz indicadora y puertos: Negro V-, GND, Amarillo RX, Verde TX, Rojo V+, Blanco CAN_H, Azul CAN_L. Incluye un cable de 200 ± 5 mm con hilos de 16AWG rojo/negro y 30AWG de teflón con recubrimiento de plata. Las especificaciones precisas garantizan una integración sin problemas en sistemas robóticos, ofreciendo un rendimiento confiable y una fácil ensamblaje.

CubeMars Actuador Robótico AKA60-6: aplicación AGV/robot de ruedas, operación de -20°C a 50°C, 14 pares de polos, relación de reducción de 6:1, voltaje de 24/48V, torque de 3Nm, corriente de 4ADC, velocidad sin carga de 320/640rpm, peso de 460g.
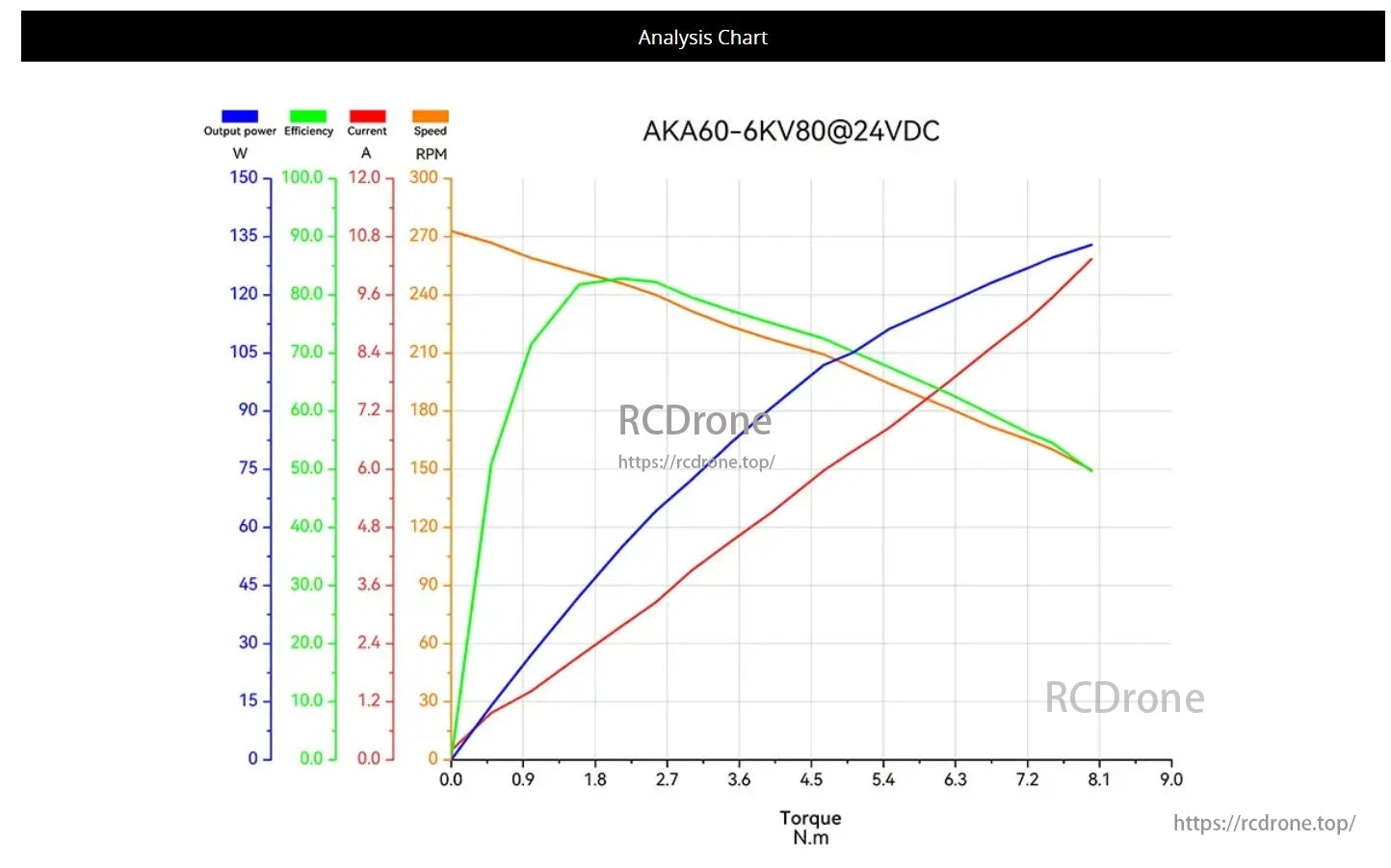
Gráfico de Análisis para AKA60-6KV80@24VDC actuator. Muestra la potencia de salida, eficiencia, corriente y velocidad en función del torque. El gráfico destaca las métricas de rendimiento bajo diversas condiciones.
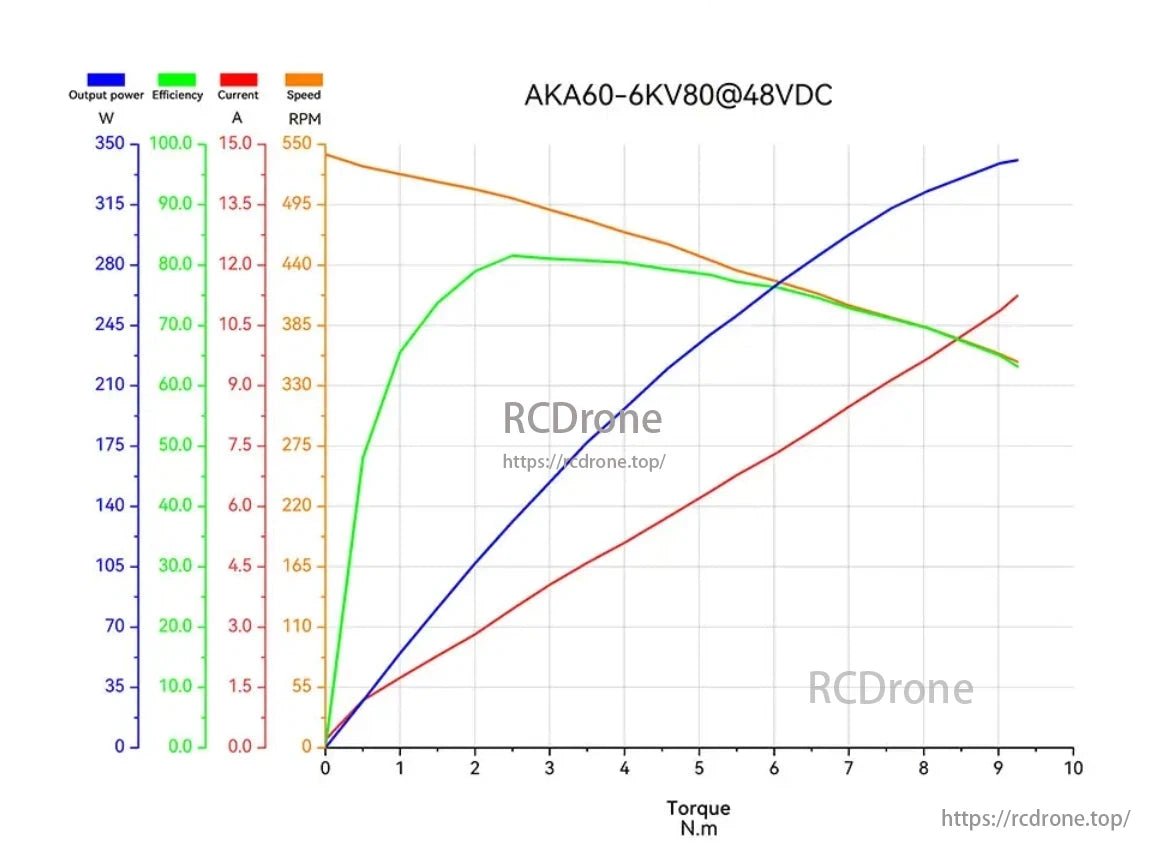
Gráfico de rendimiento del actuador robótico AKA60-6KV80@48VDC CubeMars . La potencia de salida (W), eficiencia (%), corriente (A) y velocidad (RPM) se grafican en función del torque (N·m). La eficiencia alcanza su punto máximo alrededor de 2 N·m, mientras que la potencia de salida aumenta de manera constante con el torque.La corriente aumenta linealmente y la velocidad disminuye a medida que el par aumenta. A 9 N·m, la potencia alcanza aproximadamente 350 W, la eficiencia es de aproximadamente 60%, la corriente es de 15 A y la velocidad es de aproximadamente 220 RPM. Estos datos ilustran las características operativas del actuador bajo diferentes cargas.

CubeMars AKA60-6 Actuador Robótico: robusto, duradero, nuevo conector, alta capacidad de carga radial.

El nuevo diseño mejora la capacidad de carga radial a 18 kg, una mejora del 52% en comparación con el AK60-6. Estructura del motor rediseñada para un mejor rendimiento.
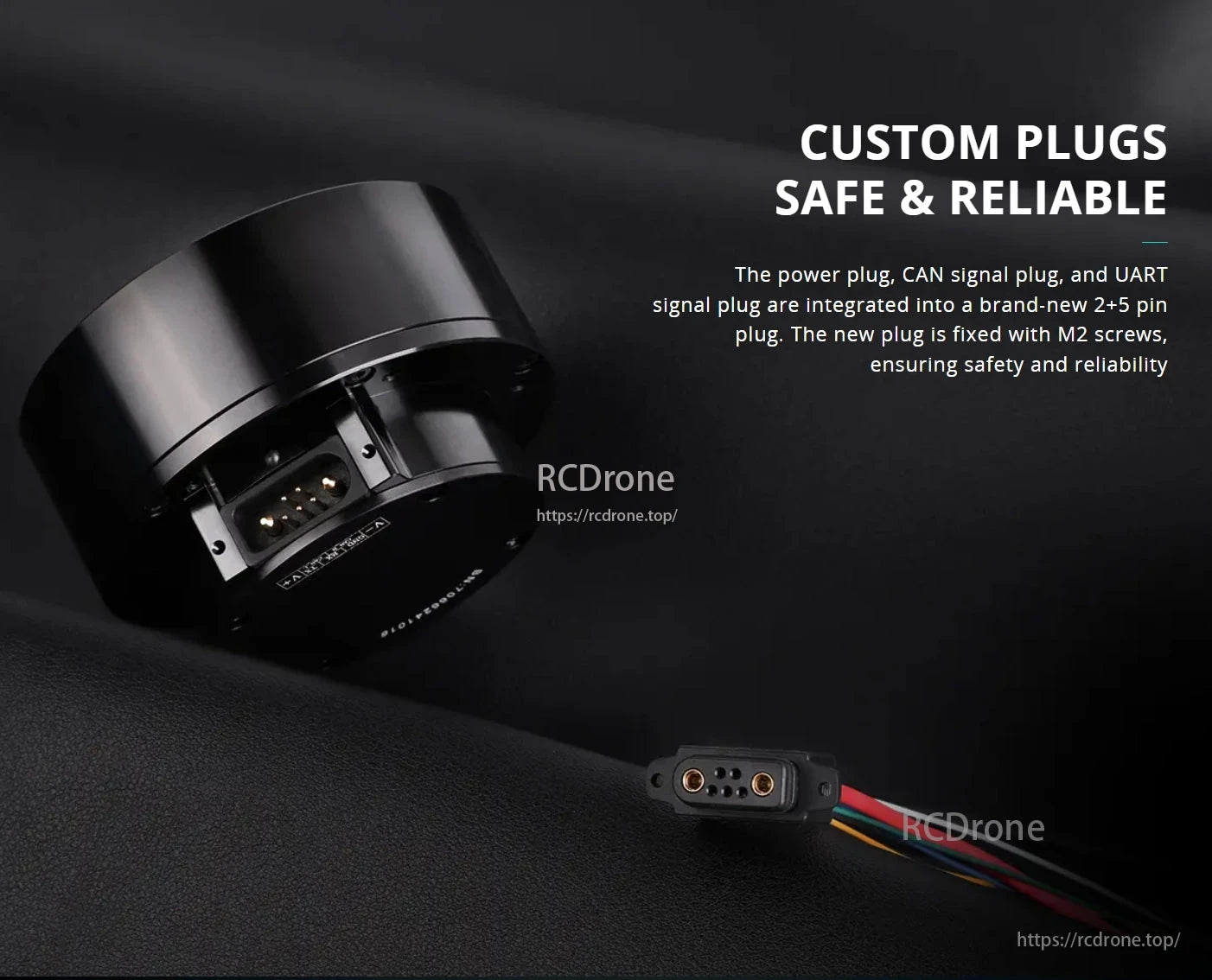
Conectores personalizados integran señales de potencia, CAN y UART en un diseño de 2+5 pines, fijados con tornillos M2 para mayor seguridad y fiabilidad.

Actualiza el controlador para facilitar la depuración. Parámetros de bucle abierto, configuraciones de UART, reconocimiento de motor con un solo clic, actualización sin importar el firmware.
Related Collections




