





Motor CubeMars R80 KV110 48V 3 Fases FOC con Sensores Hall, Exoesqueleto & Accionamiento Robótico
Motor CubeMars R80 KV110 48V 3 Fases FOC con Sensores Hall, Exoesqueleto & Accionamiento Robótico
CubeMars
No se pudo cargar la disponibilidad de retiro
Descripción
El motor CubeMars R80 KV110 es un motor trifásico destinado a aplicaciones de conducción en exoesqueletos y robótica, con sensores Hall integrados y soporte para FOC (control orientado al campo). Presenta un diseño especial de disipación de calor y una interfaz de estilo conector para simplificar la instalación.
Características clave
- Sensores Hall integrados
- Desviación de precisión del ángulo eléctrico: ±10°
- Diseño especial de disipación de calor (base ultra delgada & almohadilla de silicona de alta conductividad térmica; longitud total reducida para mejorar la disipación de calor)
- Diseño de orificio en la campana para instalación de la caja de engranajes (caja de engranajes armónica, brida u otros tipos de cajas de engranajes)
- Diseño de conector para una instalación más fácil (reemplaza los cables tradicionales)
- Gráfico de operación del motor analítico proporcionado (velocidad vs par a 48V; zonas de operación no operativa / operación a corto plazo / operación continua)
Especificaciones
| Aplicación | Exoesqueleto |
| Forma de conducción | FOC |
| Temperatura ambiente de operación | -20℃~50℃ |
| Tipo de bobinado | delta |
| Clase de aislamiento | H |
| Aislamiento de alta tensión | 1000V 5mA/2s |
| Resistencia de aislamiento | 1000V10MΩ |
| Fase | 3 |
| Pares de polos | 21 |
| Tensión nominal (V) | 48 |
| Velocidad sin carga (rpm) | 4320 |
| Par nominal (Nm) | 1.3 |
| Velocidad nominal (rpm) | 3580 |
| Corriente nominal (ADC) | 12.3 |
| Par máximo (Nm) | 4 |
| Corriente máxima (ADC) | 38.6 |
| Kv (rpm/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| Resistencia de fase a fase (mΩ) | 125 |
| Inductancia de fase a fase (μH) | 87 |
| Inercia (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| Constante de tiempo mecánica (ms) | 0.83 |
| Constante de tiempo eléctrica (ms) | 0.70 |
| Peso (g) | 354 |
| Relación de peso de par máximo (Nm/kg) | 11.3 |
| Fase del motor U V W | Dibujo de ingeniería de referencia |
| Puerto del sensor Hall | VCC, GND, Hu, Hv, HW (dibujo de ingeniería de referencia) |
| Correspondencia | Hu-U; Hv-V; Hw-W |
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Manuales / Documentos
Para preguntas sobre selección de cableado/controlador o ayuda con documentación, contacte con soporte a través de https://rcdrone.top/ o envíe un correo electrónico a [email protected].
Nota del gráfico proporcionado: Todos los datos son solo para fines informativos | Sujeto a cambios sin previo aviso.
Detalles

CubeMars R80 KV110 está diseñado para juntas robóticas compactas y accionamientos de exoesqueletos, con un perfil bajo actuador-estilo de factor de forma.

Los sensores Hall integrados proporcionan retroalimentación de la posición del rotor para un control FOC estable, con una desviación de precisión del ángulo eléctrico calificada en ±10°.

Un diseño especial de disipación de calor utiliza una base ultra delgada y una almohadilla de silicona de alta conductividad térmica para ayudar a gestionar la temperatura en construcciones compactas.

Los agujeros de montaje en patrón en la campana simplifican la conexión de una caja de engranajes armónica, brida u otros tipos de cajas de engranajes.
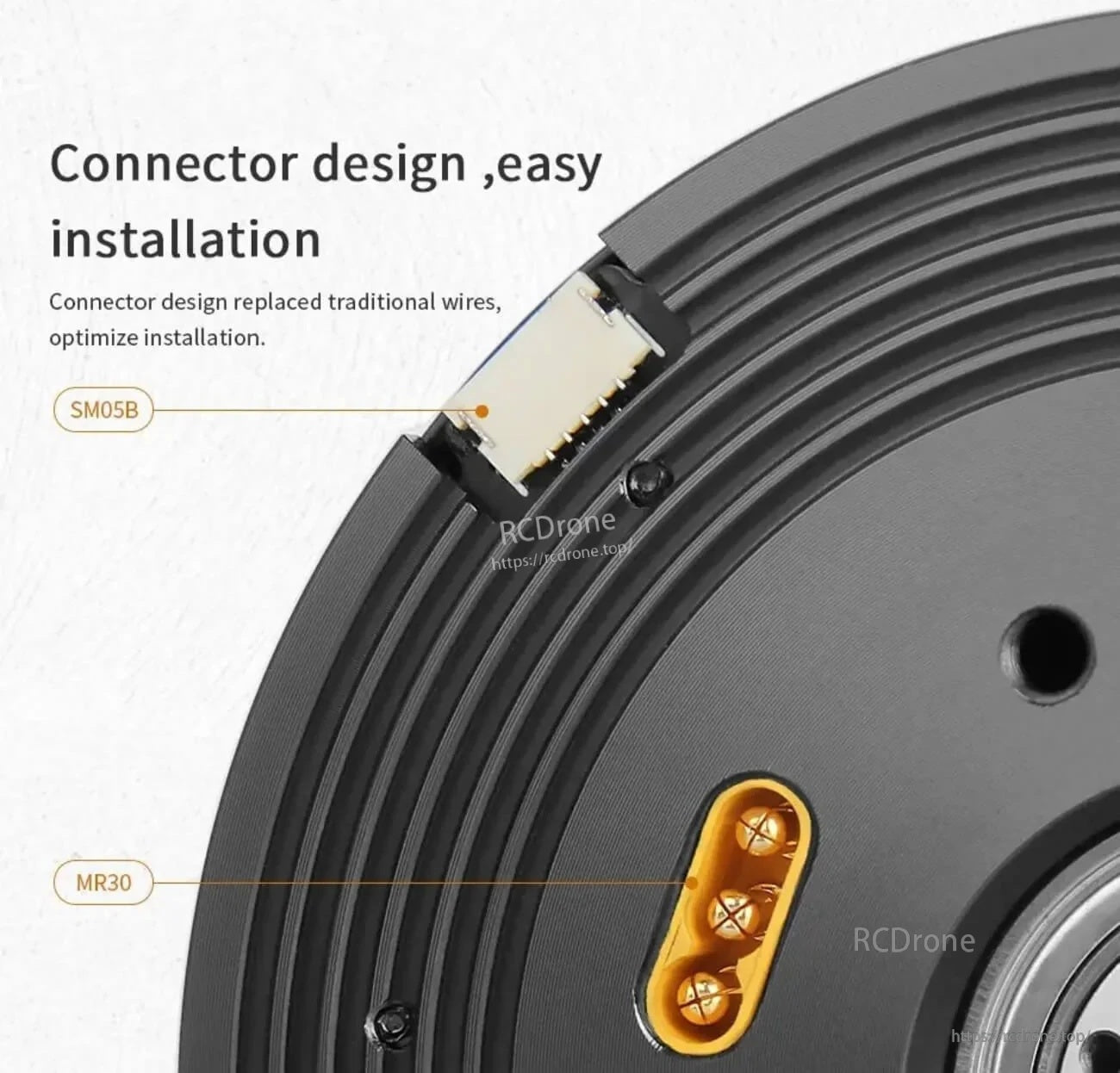
El cableado de estilo conector reemplaza los cables sueltos tradicionales para una instalación más limpia y rápida de conexiones de energía y sensores.
El diseño electromagnético optimizado tiene como objetivo un bajo par de arrastre y una baja inercia del rotor para un control de movimiento más suave.

Diseñado para robots de patas de carga pesada y otras aplicaciones de juntas de alto par donde la salida estable es importante.

El gráfico de operación de velocidad vs. par a 48V ayuda a elegir un rango continuo seguro y a entender la capacidad de pico a corto plazo.
Related Collections





