






Motor de par sin marco CubeMars RI100 KV105 para brazo cobot, exoesqueleto, brazo robótico
Motor de par sin marco CubeMars RI100 KV105 para brazo cobot, exoesqueleto, brazo robótico
CubeMars
No se pudo cargar la disponibilidad de retiro
Descripción
El motor de par sin marco CubeMars RI100 KV105 es un motor BLDC de alto rendimiento diseñado para aplicaciones de precisión como brazos de cobot, exoesqueletos, robots con patas y brazos robóticos. Funciona a 12V–48V, entregando hasta 4.95 Nm de par máximo, mientras mantiene dimensiones compactas y un bajo par de arrastre para un control de movimiento suave y preciso. Con una estructura sin marco y de rotor interno, ofrece una excepcional densidad de par, estabilidad térmica y flexibilidad para integración personalizada en estructuras robóticas compactas o ligeras.
Características Clave
-
Amplio Rango de Voltaje: Compatible con fuentes de alimentación de 24V, 36V y 48V.
-
Control de Alta Precisión: Soporta resoluciones de codificador de hasta 0.01°, compatible con Renishaw y Sick encoders.
-
Par de arrastre bajo: Permite una rotación más suave y bajo ruido—ideal para juntas de robots dinámicos.
-
Rotor de imán permanente curvado: Optimizado para el control de conducción sinusoidal BEMF, asegurando mejor capacidad de respuesta y eficiencia.
-
Estator bobinado a mano: 0.5 mm de separación y alto factor de llenado para salida de alto par y baja inercia (215.5 g·cm²).
-
Alta tolerancia térmica: Soporta entornos de trabajo de -40°C a 85°C (estructura del motor ambiental probada de -20°C a 50°C).
-
Ligero y compacto: Solo 500g con una relación de par máximo a peso de 9.9 Nm/kg.
Especificaciones
Parámetros Generales
| Parámetro | Valor |
|---|---|
| Aplicación | Brazo Cobot / Exoesqueleto |
| Tipo de Motor | BLDC Inrunner Sin Marco |
| Fase | 3 |
| Tipo de Bobinado | Delta |
| Pares de Polos | 14 |
| Peso | 500g |
| Relación Torque-Peso | 9.9 Nm/kg |
Características Eléctricas
| Parámetro | Valor |
|---|---|
| Tensión Nominal (V) | 24 / 36 / 48 |
| Par Nominal (Nm) | 1.76 |
| Par Máximo (Nm) | 4.95 |
| Velocidad Nominal (rpm) | 1370 / 2100 / 2825 |
| Velocidad Sin Carga (rpm) | 2184 / 3276 / 4368 |
| Corriente Nominal (ADC) | 13.6 |
| Corriente Máxima (ADC) | 38.6 |
| Kv (rpm/V) | 105 |
| Kt (Nm/A) | 0.129 |
| Ke (V/krpm) | 10.47 |
| Km (Nm/√W) | 0.3634 |
| Resistencia (mΩ) | 126 |
| Inductancia (µH) | 366.7 |
| Constante de Tiempo Mecánica (ms) | 0.16 |
| Constante de Tiempo Eléctrica (ms) | 2.91 |
| Inercia (g·cm²) | 215.5 |
Conexión de Cable
| Señal | Especificación del Cable |
|---|---|
| U | Negro + Cable de Silicona 16# |
| V | Amarillo + Cable de Silicona 16# |
| W | Rojo + Cable de Silicona 16# |
| Hu | Amarillo + Cable de Silicona 30# |
| Hv | Verde + Cable de Silicona 30# |
| Hw | Azul + Cable de Silicona 30# |
| VCC GND | Rojo + Cables de 30# & Negro + Cables de 30# |
Correspondencia de Cableado: Hu-U, Hv-V, Hw-W
Aspectos Destacados Adicionales
RI100 Versión Aumentada del Rotor: La altura del rotor se ha incrementado en 2mm para mejorar la compatibilidad con los sensores Hall.
-
Excelencia en el Enrollado Manual: Bobinas de cobre enrolladas con precisión y un espacio de 0.5 mm para una mejor ensamblaje y alta densidad de par.
-
Rotor de Imán Permanente Curvado: Asegura características BEMF mejoradas para un mejor control sinusoidal.
-
Opciones de Encoder Personalizadas: Soporta una variedad de encoders de alta precisión incluyendo Renishaw y Sick.
-
Compromiso de Engranaje Optimizado: Diseñado con bajo par de arrastre y excelente dinámica de engranajes, asegurando bajo ruido, operación suave, y fuerte aceleración.
Aplicaciones
-
Brazos robóticos colaborativos (Cobot)
-
Exoesqueletos robóticos portátiles
-
Robots bípedos/cuadrúpedos
-
Juntas robóticas de precisión y efectores finales
-
Sistemas de automatización e inspección compactos
Descargas manuales
Detalles
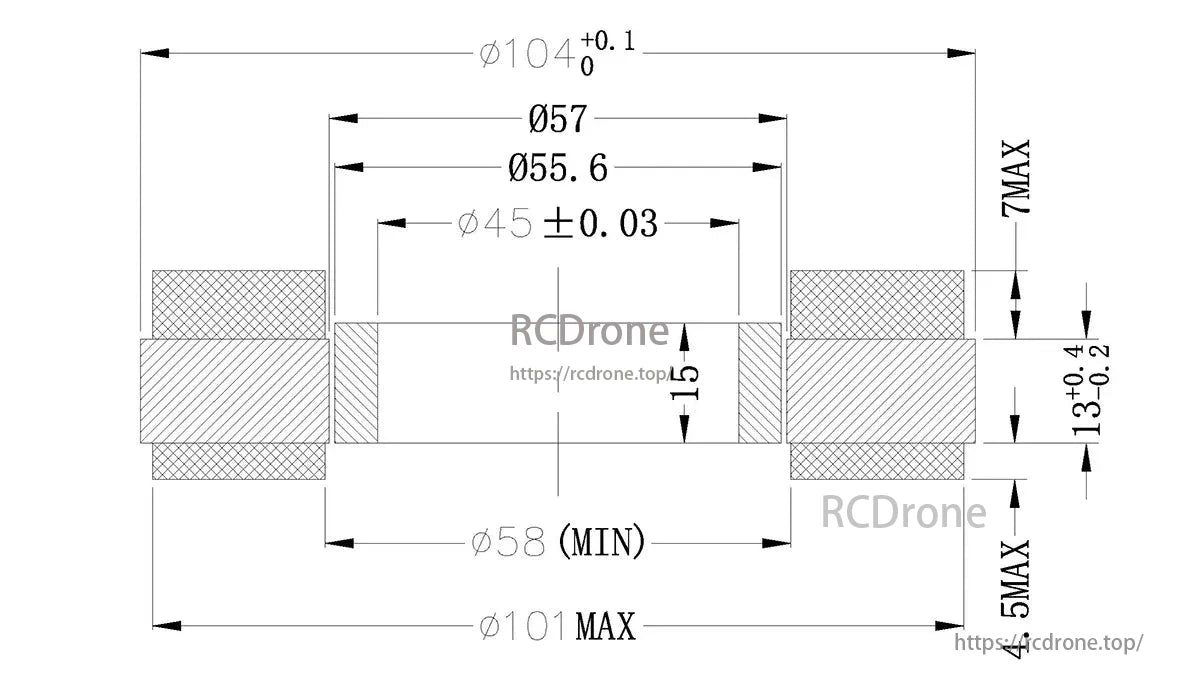
Dimensiones del motor de par CubeMars RI100: Ø104, Ø57, Ø55.6, Ø45, 15mm, Ø58, Ø101.
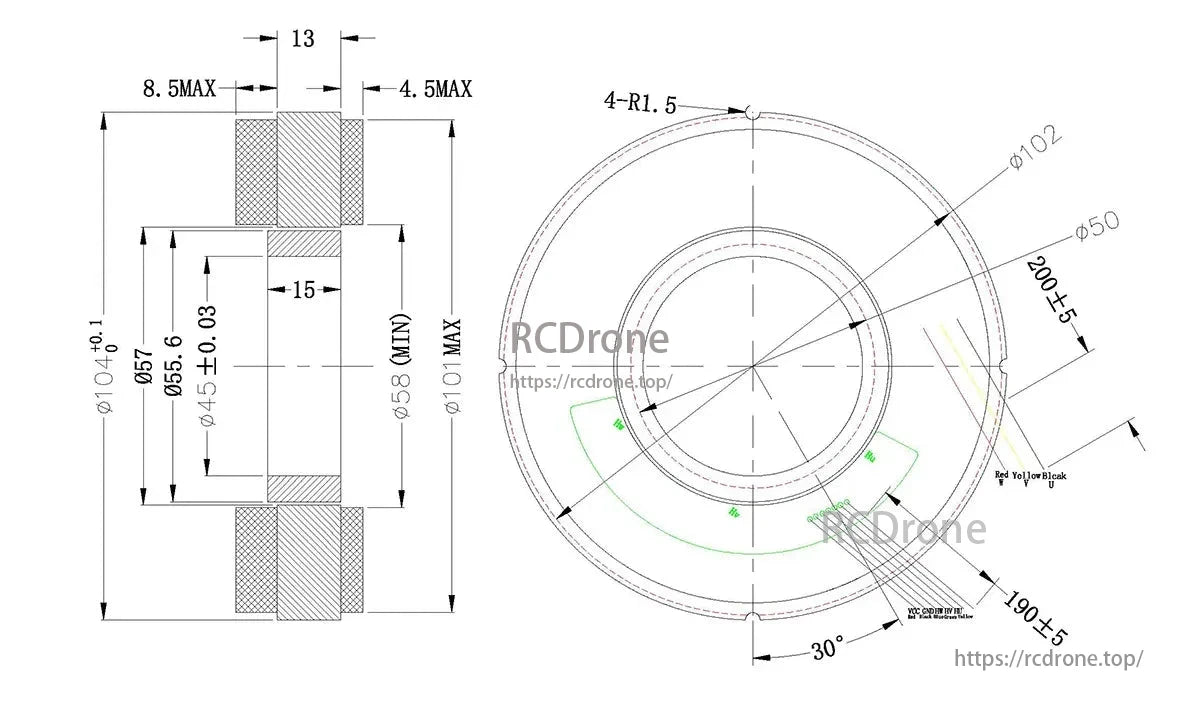
Dimensiones del motor de par: Ø104, Ø57, Ø55.6, Ø45±0.03, Ø58, Ø101 máx, 200±5, 190±5, ángulo de 30°, características 4-R1.5.
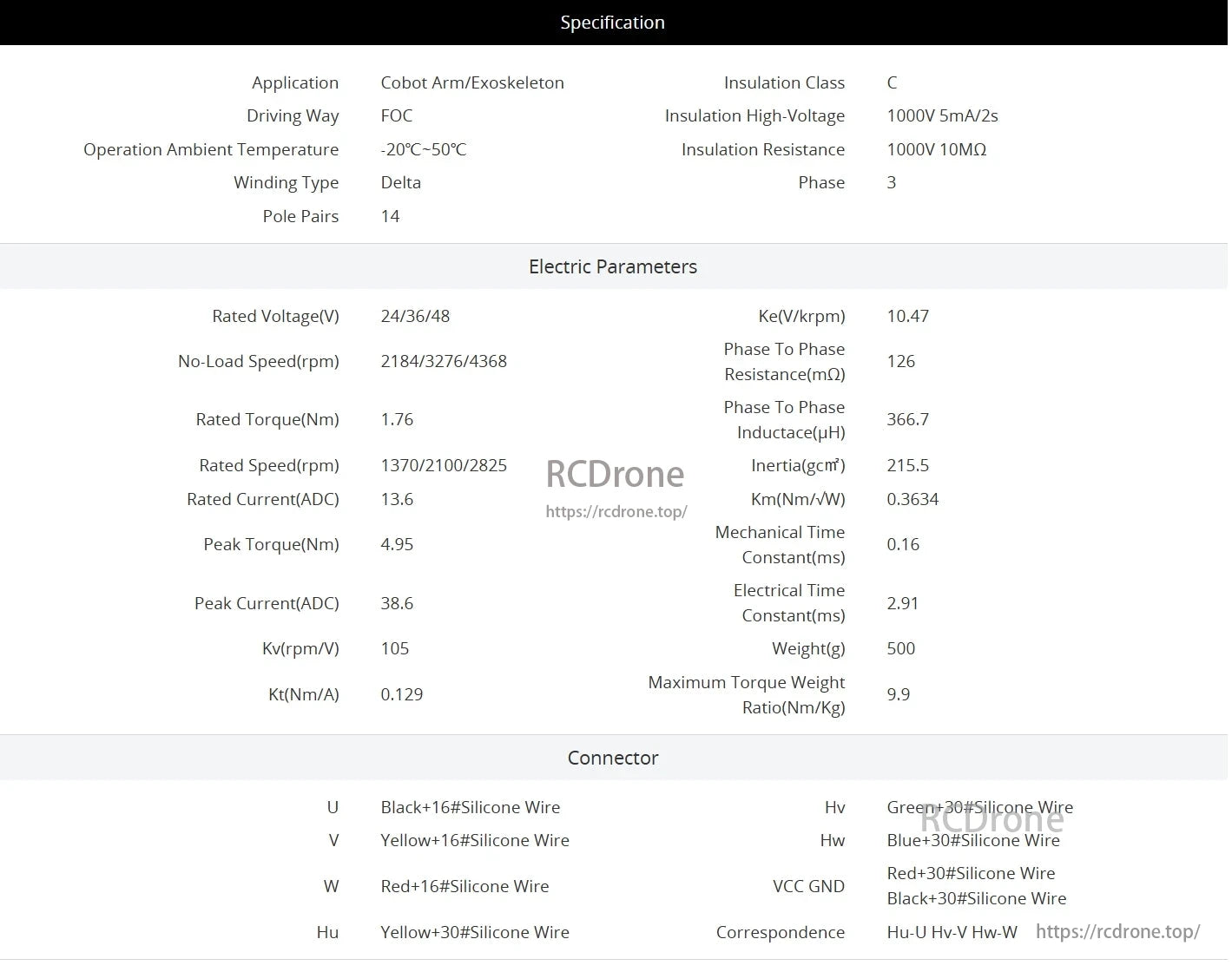
CubeMars Motor de Par RI100: 24/36/48V, 1.76Nm de par, 1370/2100/2825rpm, 13.6A de corriente, 38.6A pico, 10.47V/krpm, 366.7μH de inductancia, 215.5gcm² de inercia, relación de peso de par máximo de 9.9Nm/Kg, operación de -20°C a 50°C.

CubeMars RI100 KV105@24VDC anal gráfico de análisis. Muestra el par (N.m) frente a la potencia de salida (W), eficiencia, corriente (A) y velocidad (RPM). El gráfico resalta las características de rendimiento del motor bajo diferentes cargas.
Motor de par CubeMars RI100: menor par de arrastre, funcionamiento suave, bajo ruido, gran dinamismo.
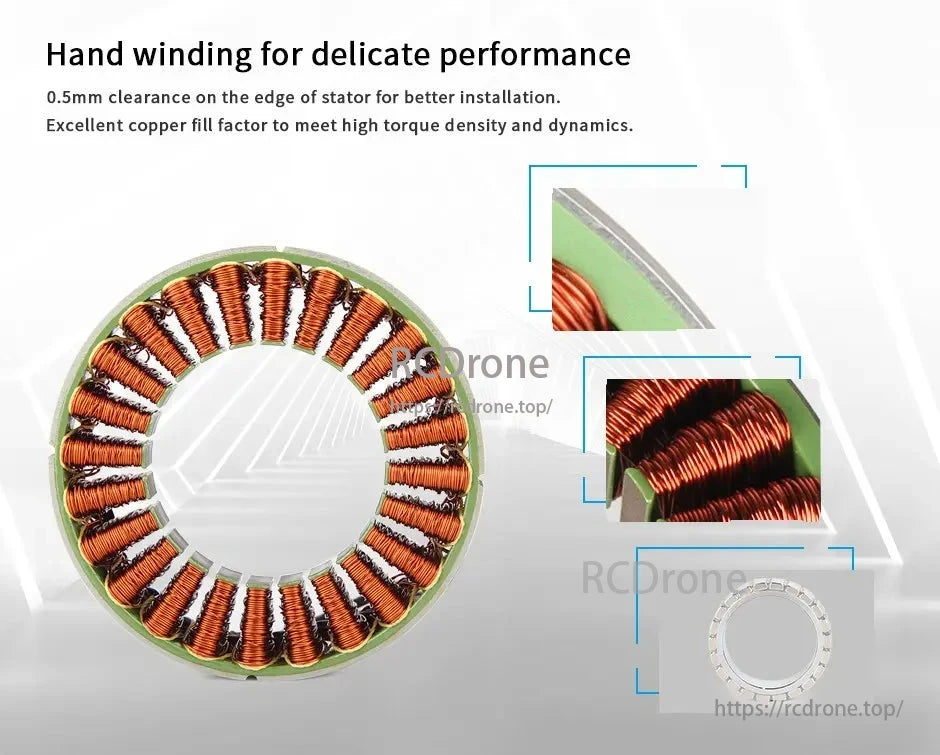
Estator enrollado a mano con un espacio de 0.5 mm para un rendimiento óptimo.

Versión elevada del rotor RI100. Altura total aumentada en 2 mm para mejorar la detección del sensor Hall.
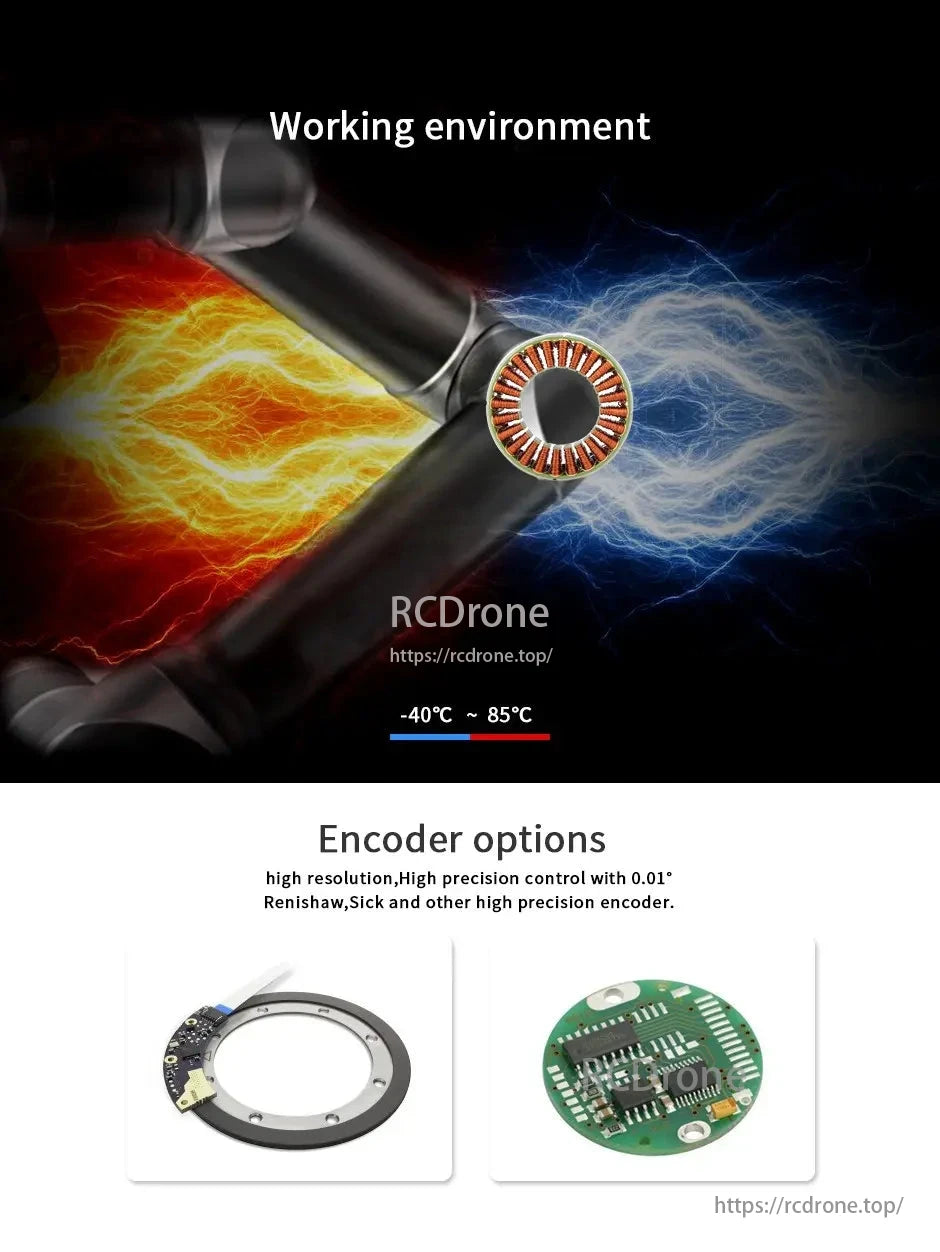
Motor de par CubeMars RI100: -40°C a 85°C, opciones de codificadores de alta precisión.
Related Collections






