




Motor sin marco CubeMars RI60 KV120 Inrunner | 0,57Nm, 120KV, 48V BLDC para Cobot y Exoesqueleto
Motor sin marco CubeMars RI60 KV120 Inrunner | 0,57Nm, 120KV, 48V BLDC para Cobot y Exoesqueleto
CubeMars
No se pudo cargar la disponibilidad de retiro
Descripción
El motor de par sin marco CubeMars RI60 KV120 está diseñado para aplicaciones robóticas compactas y de alto rendimiento. Soporta voltajes de operación de 24V/36V/48V, este motor BLDC sin marco ofrece alta densidad de par, movimiento suave con bajo cogging, y resolución de control precisa de 0.01°. Con un diámetro exterior compacto de Φ60mm y un peso de solo 155.9g, es ideal para brazos de cobot, exoesqueletos, y juntas robóticas con restricciones de espacio ajustadas.
Este motor cuenta con un estator enrollado a mano para un factor de llenado de cobre óptimo, imanes permanentes curvados para una respuesta BEMF sinusoidal eficiente, y opciones para integración de sensor Hall y encoder. Soporta Control Orientado al Campo (FOC), opera de manera confiable de -20°C a 50°C, y soporta hasta 1.63 Nm de par máximo. La versión de rotor elevado mejora la precisión del sensor Hall al aumentar el rango de detección en 2 mm.
Características Clave
-
Diseño BLDC Inrunner Sin Marco – Sin carcasa exterior, ideal para instalaciones empotradas
-
Densidad de Par Alta – Relación máxima de par a peso de 10.46 Nm/kg
-
Control de Precisión – Compatible con codificadores de alta resolución, soporta 0.01° posicionamiento
-
Par de arrastre bajo – Funcionamiento suave, reducción de vibraciones y ruido
-
Tolerante a la temperatura – Funciona en temperaturas ambiente de -20°C a 50°C
-
Múltiples interfaces de control – Soporta retroalimentación de encoder y sensor Hall
-
Estator enrollado a mano – Excelente llenado de cobre, 0.5mm de espacio en el borde para un ensamblaje fácil
-
Versión de rotor opcional – +2mm de altura del rotor mejora la alineación del sensor Hall
Especificaciones técnicas
Aplicación y configuración
| Parámetro | Valor |
|---|---|
| Aplicación | Brazo Cobot / Exoesqueleto |
| Forma de conducción | FOC |
| Fase | 3 Fases |
| Tipo de bobinado | Delta |
| Pares de polos | 14 |
| Clase de aislamiento | C |
| Voltaje de aislamiento | 500V 5mA/2s |
| Resistencia de aislamiento | 500V 10MΩ |
| Temp. de operación | -20℃ ~ 50℃ |
Características Eléctricas
| Parámetro | Valor |
|---|---|
| Tensión Nominal (V) | 24 / 36 / 48 |
| Velocidad Sin Carga (rpm) | 2532 / 3798 / 5064 |
| Velocidad Nominal (rpm) | 1440 / 2320 / 3190 |
| Par Nominal (Nm) | 0.57 |
| Par Máximo (Nm) | 1.63 |
| Corriente Nominal (ADC) | 5.6 |
| Corriente Máxima (ADC) | 16.8 |
| Kv (rpm/V) | 120 |
| Ke (V/krpm) | 9.03 |
| Kt (Nm/A) | 0.100 |
| Resistencia de Fase (mΩ) | 900 |
| Inductancia de Fase (μH) | 877.5 |
| Inercia (g·cm²) | 33.05 |
| Km (Nm/√W) | 0.1054 |
| Const. de Tiempo Mec. (ms) | 0.3 |
| Const. de Tiempo Eléctr. (ms) | 0.98 |
| Peso (g) | 155.9 |
| Relación Par/Peso | 10.46 Nm/kg |
Opciones de Encoder y Sensor Hall
-
Con Sensor Hall: Mejora en la detección del rotor, recomendado para detección de posición de alta precisión
-
Sin Sensor Hall: Diseño compacto para entornos restringidos
-
Encoders Soportados: Renishaw, Sick, otros encoders de alta precisión (0.01° resolución)
Dimensiones Mecánicas
| Versión | Diámetro Exterior | Diámetro Interior | Altura del Rotor | Espesor Máximo |
|---|---|---|---|---|
| Sin Hall | Ø60 mm | Ø30 mm | 15 mm | 21 mm (máx) |
| Con Hall | Ø60 mm | Ø30 mm | 15 mm | 23 mm (máx) |
Consulte los dibujos técnicos para obtener tolerancias exactas y patrones de orificios de montaje.
Curva de Rendimiento
Probado a 24VDC:
-
Eficiencia máxima a ~0.3 Nm
-
Poder de salida pico >125W a ~1.1 Nm
-
Velocidad máxima ~2500 RPM
-
Respuesta de corriente estable en todo el rango de torque
Información de cableado y conector
| Cable | Color + Tamaño |
|---|---|
| U | Negro + 18# Silicona |
| V | Amarillo + 18# Silicona |
| W | Rojo + 18# Silicona |
| Hu | Azul + 30# Silicona |
| Hv | Verde + 30# Silicona |
| Hw | Amarillo + 30# Silicona |
| VCC | Rojo + 30# Silicona |
| GND | Negro + 30# Silicona |
Mapa de cableado:
Hu-U, Hv-V, Hw-W
Descargas de manuales
Aplicaciones
-
Brazos robóticos colaborativos
-
Articulaciones de exoesqueleto
-
Robots bípedos y cuadrúpedos
-
Robótica médica de precisión
-
Módulos de servoembebidos
Detalles
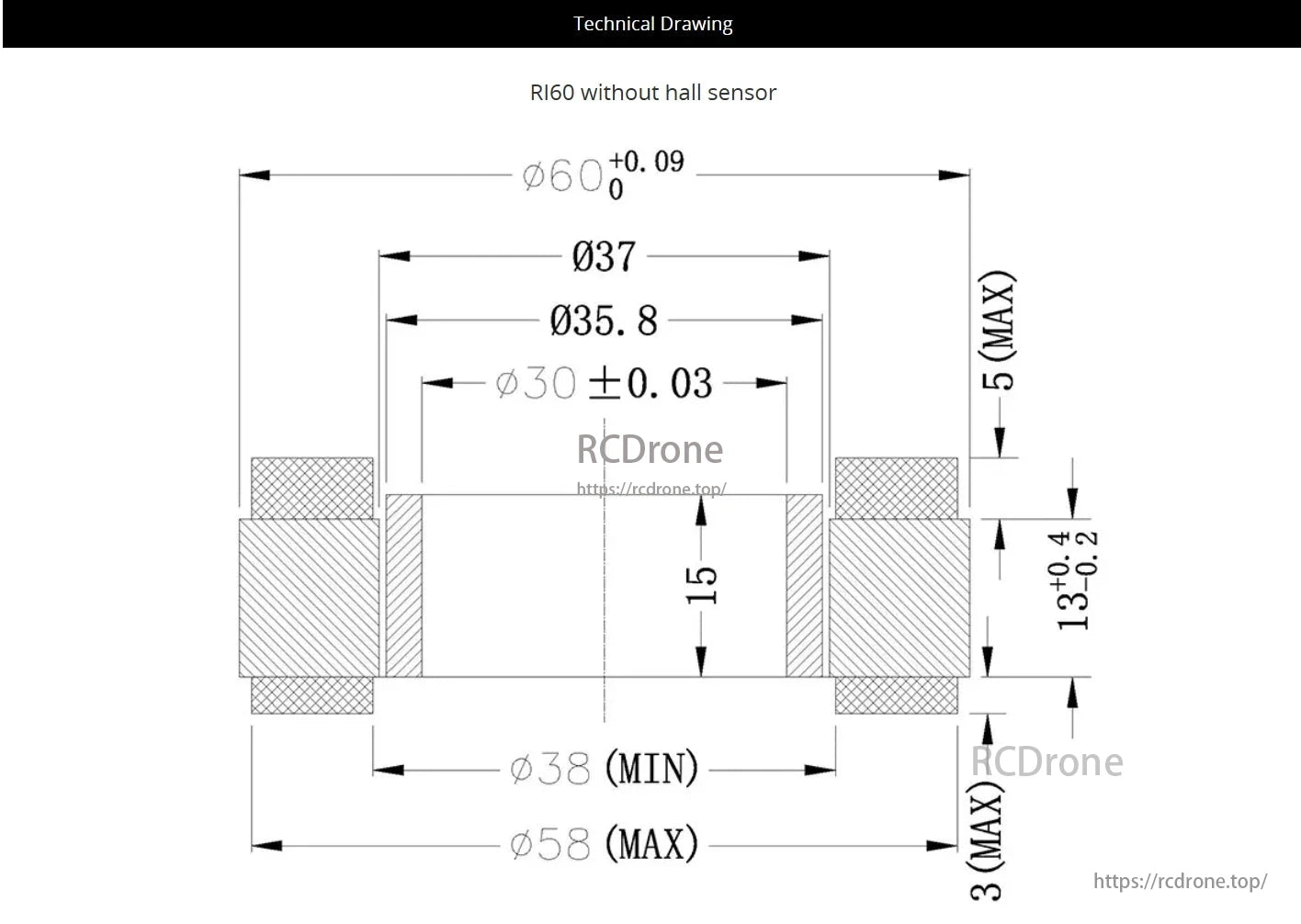
CubeMars Dimensiones del motor RI60: Ø60, Ø37, Ø35.8, Ø30, Ø38 (mín), Ø58 (máx), 15 longitud, 5 altura máxima, 13 ±0.4 ancho.
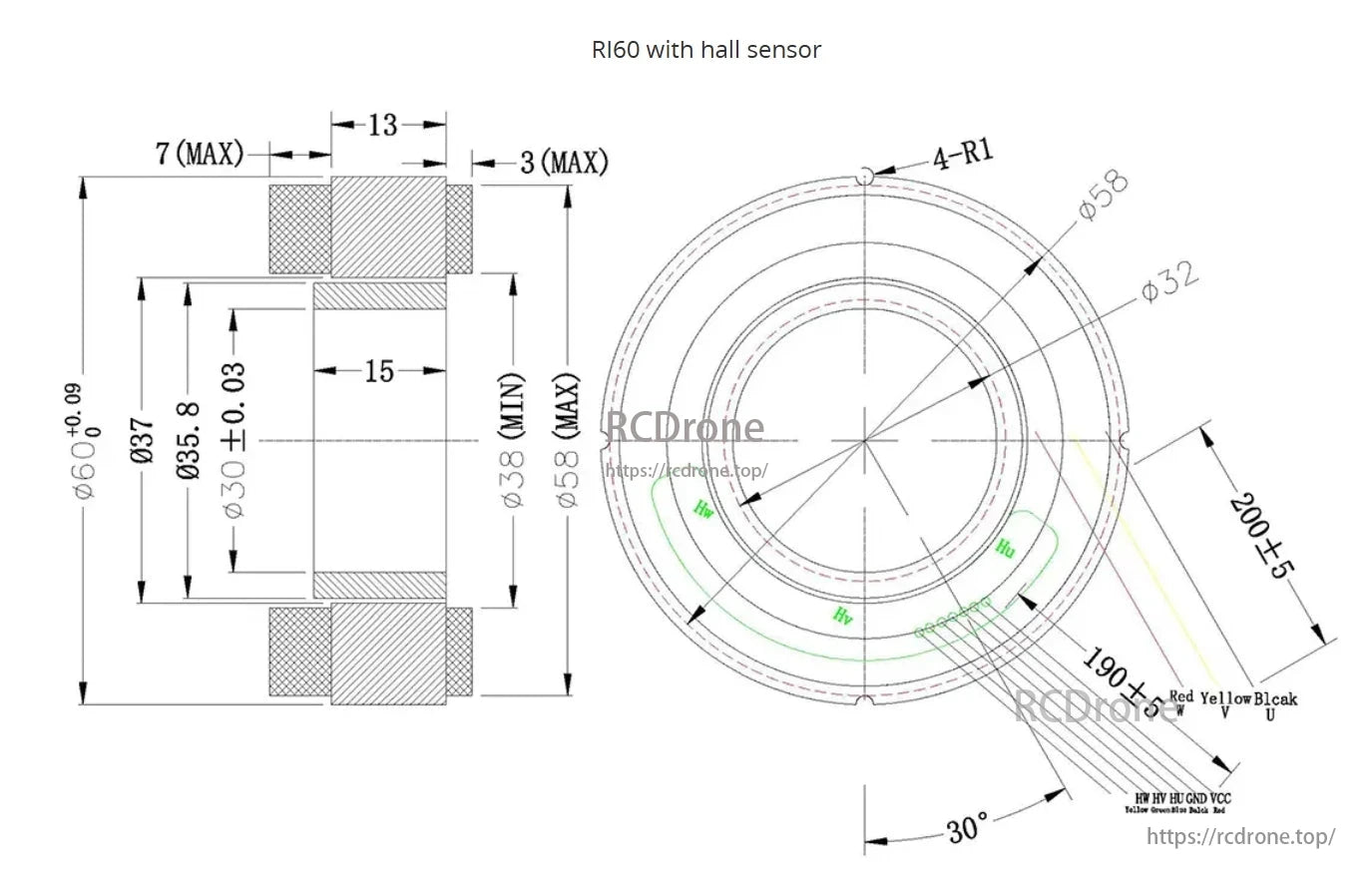
Motor CubeMars RI60 con sensor Hall. Dimensiones: 60 mm de diámetro, 200 mm de longitud. Presenta marcas de 4-R1, φ58, φ32 y ángulos de 30°. Incluye etiquetas HW, HV, HU.
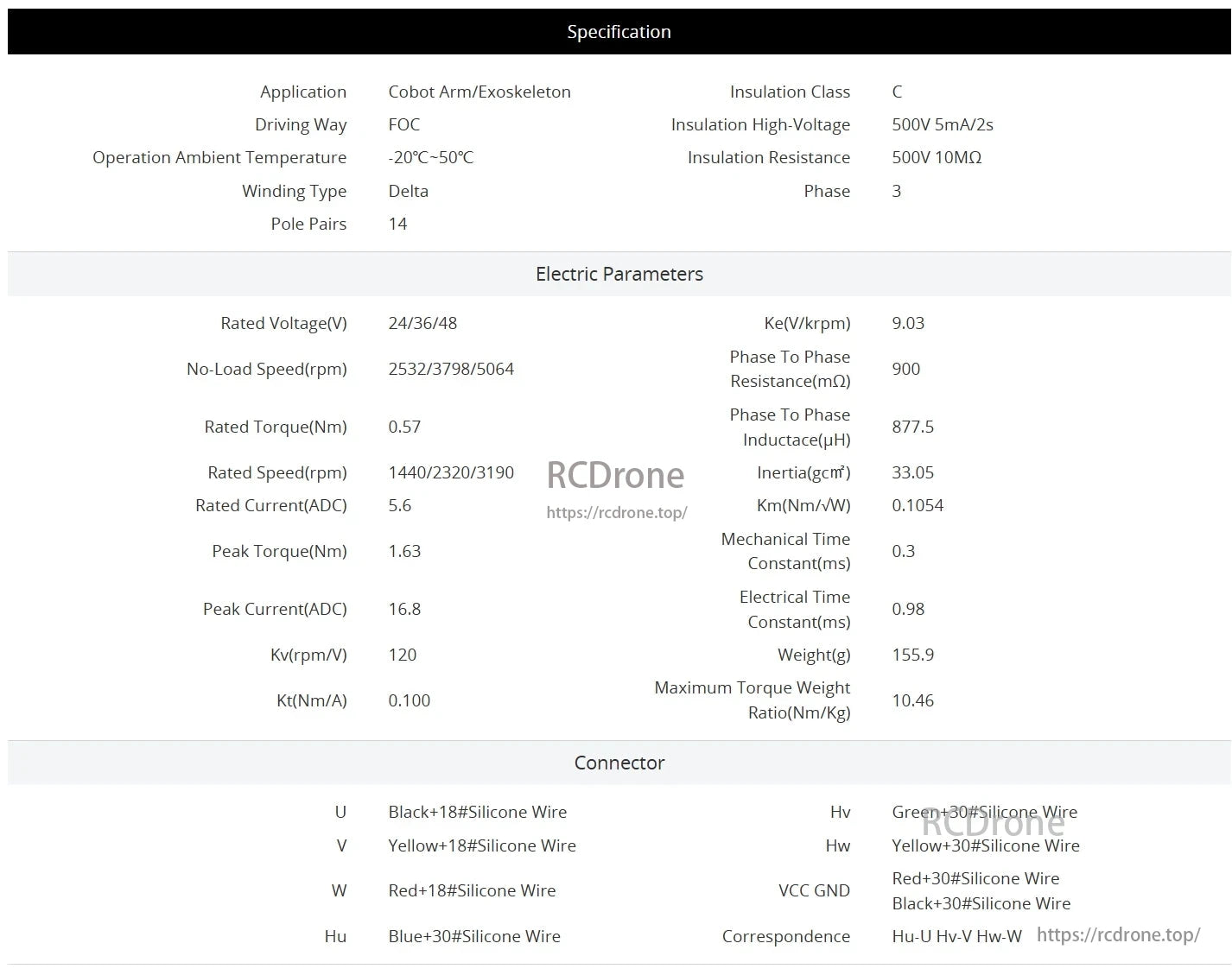
Motor CubeMars RI60: aplicación en brazo cobot/exoesqueleto, conducción FOC, operación de -20°C a 50°C, 14 pares de polos. Voltaje nominal 24/36/48V, velocidad sin carga 2532/3798/5064rpm, par nominal 0.57Nm, par máximo 1.63Nm.
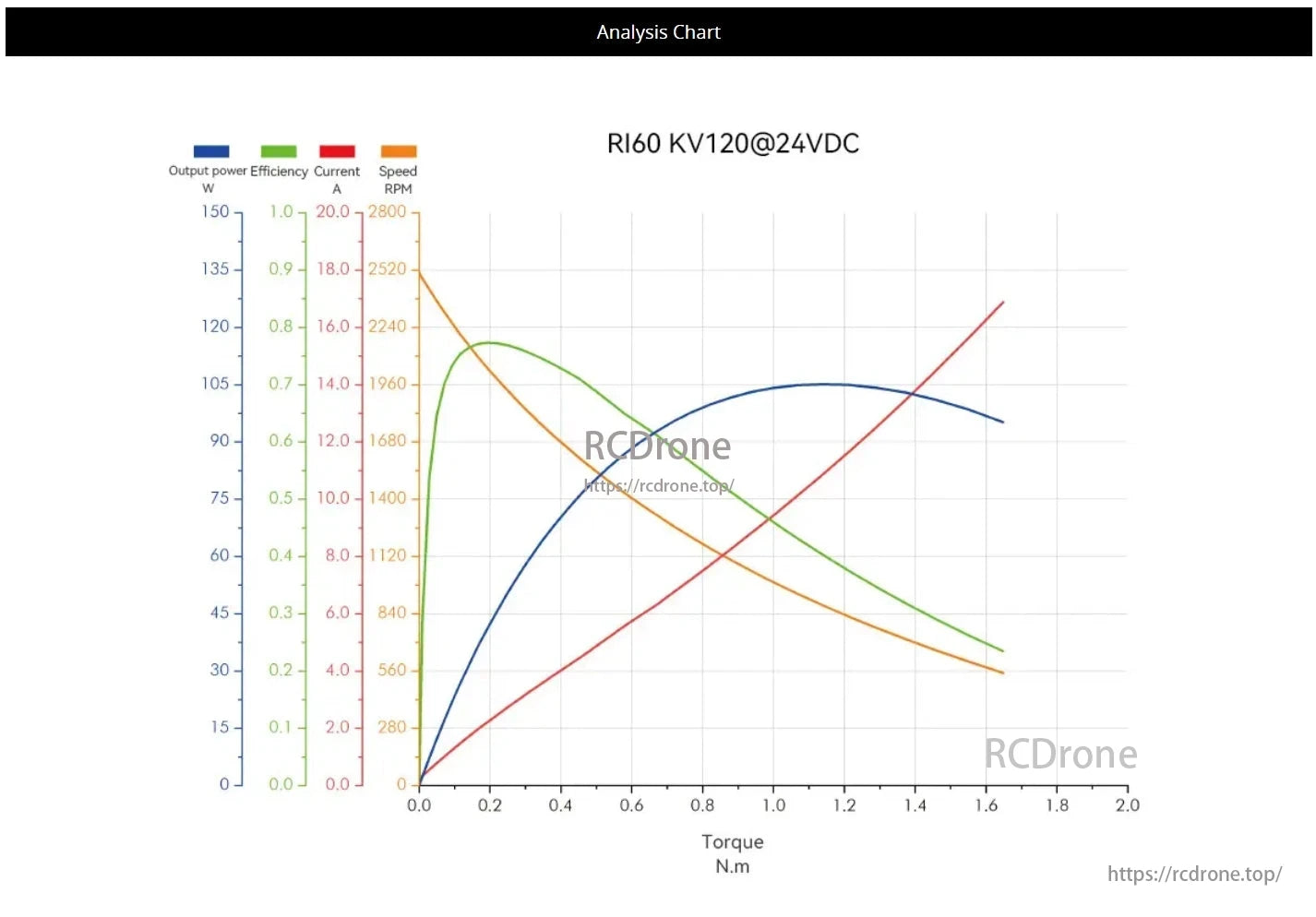
Gráfico de análisis del motor CubeMars RI60 en KV120@24VDC. Dispmuestra la potencia de salida, eficiencia, corriente y velocidad en función del par. La eficiencia alcanza su punto máximo cerca de 0.2 N.m, con la velocidad disminuyendo a medida que aumenta el par.
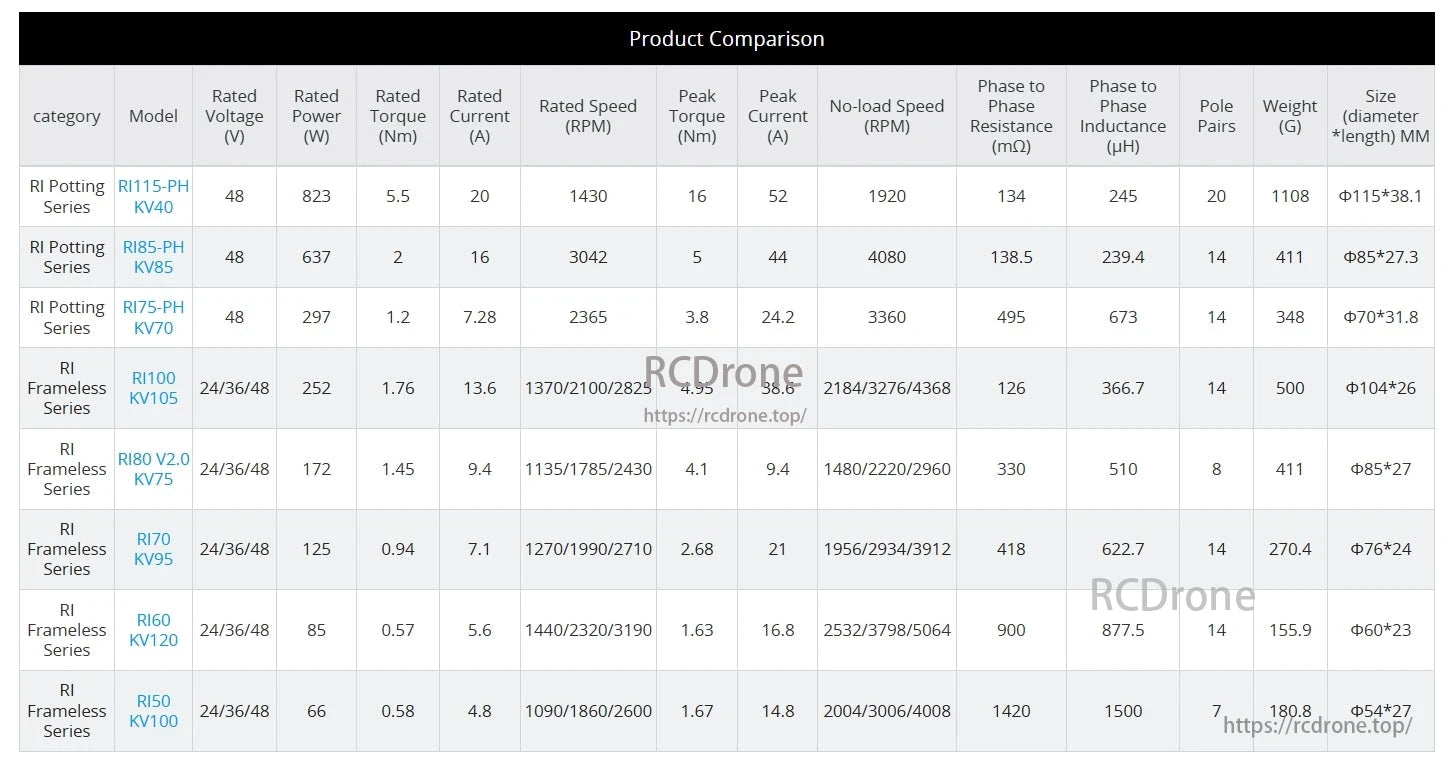
Motor CubeMars RI60 KV120: 24/36/48V, 85W, par de 0.57Nm, corriente de 5.6A, velocidad de 1440/2320/3190 RPM, par máximo de 1.63Nm, corriente máxima de 16.8A, resistencia de 900mΩ, inductancia de 877.5µH, 14 pares de polos, peso de 155.9g, tamaño φ60*23mm.

Motor CubeMars RI60: Par de arrastre reducido, funcionamiento suave, bajo ruido, gran dinamismo.

Estator hecho a mano con un espacio de 0.5 mm para un rendimiento óptimo.

Imán permanente curvado para el diseño de motor Sinus BEMF, asegurando un control fácil.

Versión elevada del rotor RI60. Altura total aumentada en 2 mm para una mejor detección del sensor Hall.
Motor CubeMars RI60: -40°C a 85°C, opciones de codificador de alta resolución.
Related Collections




