



Motor robótico DAMIAO DM-2325 24 V, 380 rpm, 5 N·m con engranaje 1:25, CAN/FD CAN y codificador incremental
Motor robótico DAMIAO DM-2325 24 V, 380 rpm, 5 N·m con engranaje 1:25, CAN/FD CAN y codificador incremental
DAMIAO
Precio habitual
$45.00 USD
Precio habitual
Precio de oferta
$45.00 USD
Precio unitario
por
Impuestos incluidos.
Los gastos de envío se calculan en la pantalla de pago.
No se pudo cargar la disponibilidad de retiro
Descripción general
El DAMIAO DM-2325 es un Motor Robot compacto diseñado para un control de movimiento preciso en robótica. Cuenta con retroalimentación de codificador incremental, interfaces de control CAN/FD y configuración UART. Con una relación de reducción de 1:25, suministro de 24 V y modos de control definidos, es adecuado para aplicaciones que requieren una regulación de velocidad y posición confiable.
Características clave
- Modelo: DM-2325
- Voltaje nominal: 24 V
- Corriente nominal: 5 A / 3.2 A; Corriente de pico: 13 A / 7.5 A
- Par nominal: 5 N·m; Par de pico: 2 N·m
- Velocidad nominal: 380 rpm; Velocidad máxima sin carga: 560 rpm
- Relación de reducción: 1:25; Pares de polos: 7
- Inductancia de fase: 75 μH; Resistencia de fase: 0.2915 Ω
- Carga radial máxima: 395 N
- Dimensiones: 28 mm de diámetro exterior; 77.6 mm de altura
- Peso del motor: 172.
- 2 g
- Tipo de codificador: Codificador incremental
- Interfaz de control: CAN@1 Mbps (Máx), FD CAN@5 Mbps (Máx)
- Interfaz de configuración: UART@921600 bps
- Modos de control: Modo MIT, Modo de velocidad, Modo de posición
Especificaciones
| Modelo | DM-2325 |
| Tensión nominal | 24 V |
| Corriente nominal | 5 A / 3.2 A |
| Corriente de pico | 13 A / 7.5 A |
| Par nominal | 5 N·m |
| Par de pico | 2 N·m |
| Velocidad nominal | 380 rpm |
| Velocidad máxima sin carga | 560 rpm |
| Relación de reducción | 1:25 |
| Pares de polos | 7 |
| Inductancia de fase | 75 μH |
| Resistencia de fase | 0.html 2915 Ω |
| Carga Radial Máxima | 395 N |
| Diámetro Exterior | 28 mm |
| Altura | 77.6 mm |
| Peso del Motor | 172.2 g |
| Tipo de Encoder | Encoder incremental |
| Interfaz de Control | CAN@1 Mbps (Máx), FD CAN@5 Mbps (Máx) |
| Interfaz de Configuración | UART@921600 bps |
| Modos de Control | Modo MIT; Modo de Velocidad; Modo de Posición |
Protección
- Protección contra sobretemperatura del controlador; temperatura de protección: 120 °C. La sobretemperatura sale del "modo habilitado".
- Protección contra sobretemperatura del motor; configurada según los requisitos de uso (se recomienda no exceder 100 °C). La sobretemperatura sale del "modo habilitado".
- Protección contra sobrevoltaje del motor; configurada según los requisitos de uso (se recomienda no exceder 60 V). El sobrevoltaje sale del "modo habilitado". html
- Protección contra pérdida de comunicación; si no se recibe ningún comando CAN dentro del período establecido, el sistema sale del "modo habilitado".
- Protección contra sobrecorriente del motor; configurado según los requisitos de uso (se recomienda no exceder 13 A). La sobrecorriente sale del "modo habilitado".
- Protección contra bajo voltaje del motor; si la tensión de suministro es inferior al valor establecido, sale del "modo habilitado" (tensión de suministro no inferior a 15 V).
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Manuales y Descargas
- DM_2325_Motor.stp
- DM_2325_Motor_armature.stp
- DM-2325_dibujo_de_instalación.pdf
- DM-2325_dibujo_de_instalación_armadura.pdf
Dibujo de Instalación
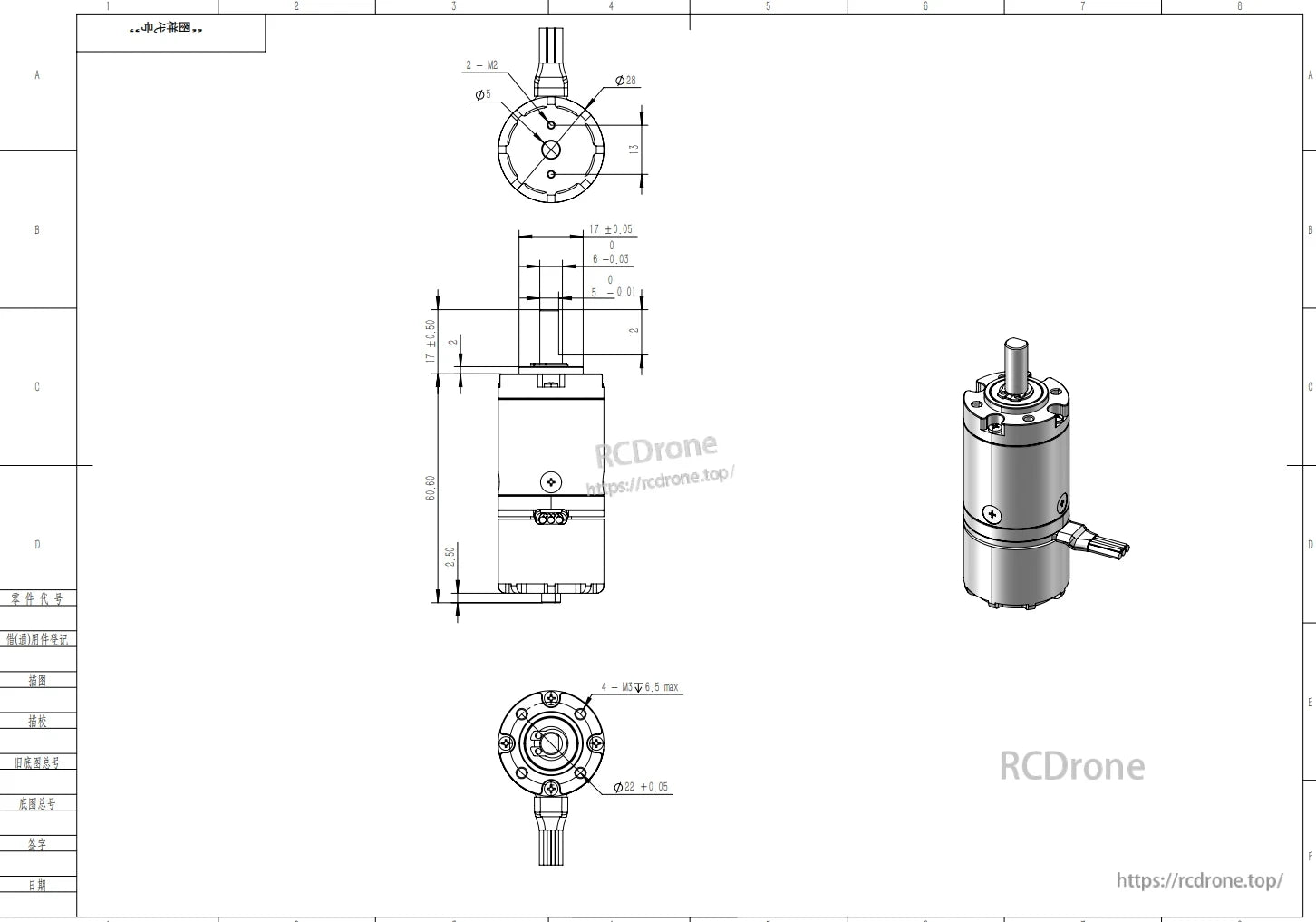
Dibujo técnico del motor robot con dimensiones y especificaciones
Dibujo técnico del motor de robot con dimensiones y especificaciones

Dibujo técnico del motor de robot con dimensiones y vista 3D
Related Collections




- Al seleccionar una opción, se actualiza toda la página.
- Se abre en una nueva ventana.