




Motor de robot DAMIAO DM-J4310-2EC, 24V, 3 N.M nominal, 7 N.M pico, 120 RPM, CAN@1Mbps, UART@921600bps
Motor de robot DAMIAO DM-J4310-2EC, 24V, 3 N.M nominal, 7 N.M pico, 120 RPM, CAN@1Mbps, UART@921600bps
DAMIAO
No se pudo cargar la disponibilidad de retiro
Descripción general
DAMIAO DM-J4310-2EC es un motor de robot compacto con engranaje integrado y codificadores magnéticos duales para un control de movimiento preciso. Funciona a 24 V y proporciona un par nominal de 3 N.M, un par máximo de 7 N.M y una velocidad nominal de 120 RPM a través de una etapa de reducción de 10:1. El control y la configuración son compatibles a través de CAN@1Mbps y UART@921600bps.
Características clave
- Funcionamiento a 24 V con 2.5A nominal y 7.5A de corriente máxima
- Reducción de 10:1 para una alta salida de par: 3 N.M nominal, 7 N.M máximo
- Codificadores magnéticos duales de una vuelta, resolución de 14 bits
- Tamaño compacto y ligero: diámetro exterior de 57 mm, altura de 46 mm, 300 g
- Interfaz de control CAN@1Mbps; configuración UART@921600bps
Especificaciones
| Parámetro | Valor |
|---|---|
| Modelo | DM-J4310-2EC |
| Voltaje nominal | 24 V |
| Corriente nominal | 2.html 5A |
| Corriente de pico | 7.5A |
| Par nominal | 3 N.M |
| Par de pico | 7 N.M |
| Velocidad nominal | 120 RPM |
| Máx. | html|
| Velocidad sin carga | 200 RPM |
| Relación de reducción | 10:1 |
| Pares de polos | 14 |
| Inductancia de fase | 340uH |
| Resistencia de fase | 650 mOhm |
| Diámetro exterior | 57mm |
| Altura | 46mm |
| Peso del motor | 300g |
| Resolución del encoder | 14Bit |
| Cantidad de encoders | 2 |
| Tipo de encoder | Encoder magnético de una vuelta |
| Interfaz de control | CAN@1Mbps |
| Interfaz de configuración | UART@921600bps |
Dimensiones del motor
- Diámetro exterior: 57mm
- Altura total: 46mm; longitud del cuerpo: 45mm
- Círculo de pernos de la cara frontal: 6 x M3, profundidad del agujero 5; diámetro del círculo 50mm
- Círculo de pernos de la cara trasera: 4 x M3, profundidad del agujero 4; diámetro del círculo 38mm
- Círculo interior: 24. html 30mm
- Tres agujeros: 4mm (+0.04 / +0.02)
- Dos agujeros: 3mm (+0.04 / +0.02), profundidad 5
- Ángulo de característica: 15°
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Integración de Código Abierto
OpenArm es un brazo robótico humanoide completamente de código abierto diseñado para la investigación y despliegue de IA física en entornos ricos en contacto.
Manuales
- DAMIAO_DM_J4310_2EC_V1.1_Motor.stp
- DM-J4310-2EC_Instrucciones_Motor_de_Engranaje.pdf
- DM_J4310_V1.1_dibujo_de_instalación.pdf
Detalles

Dibujo técnico del motor de robot con dimensiones y especificaciones
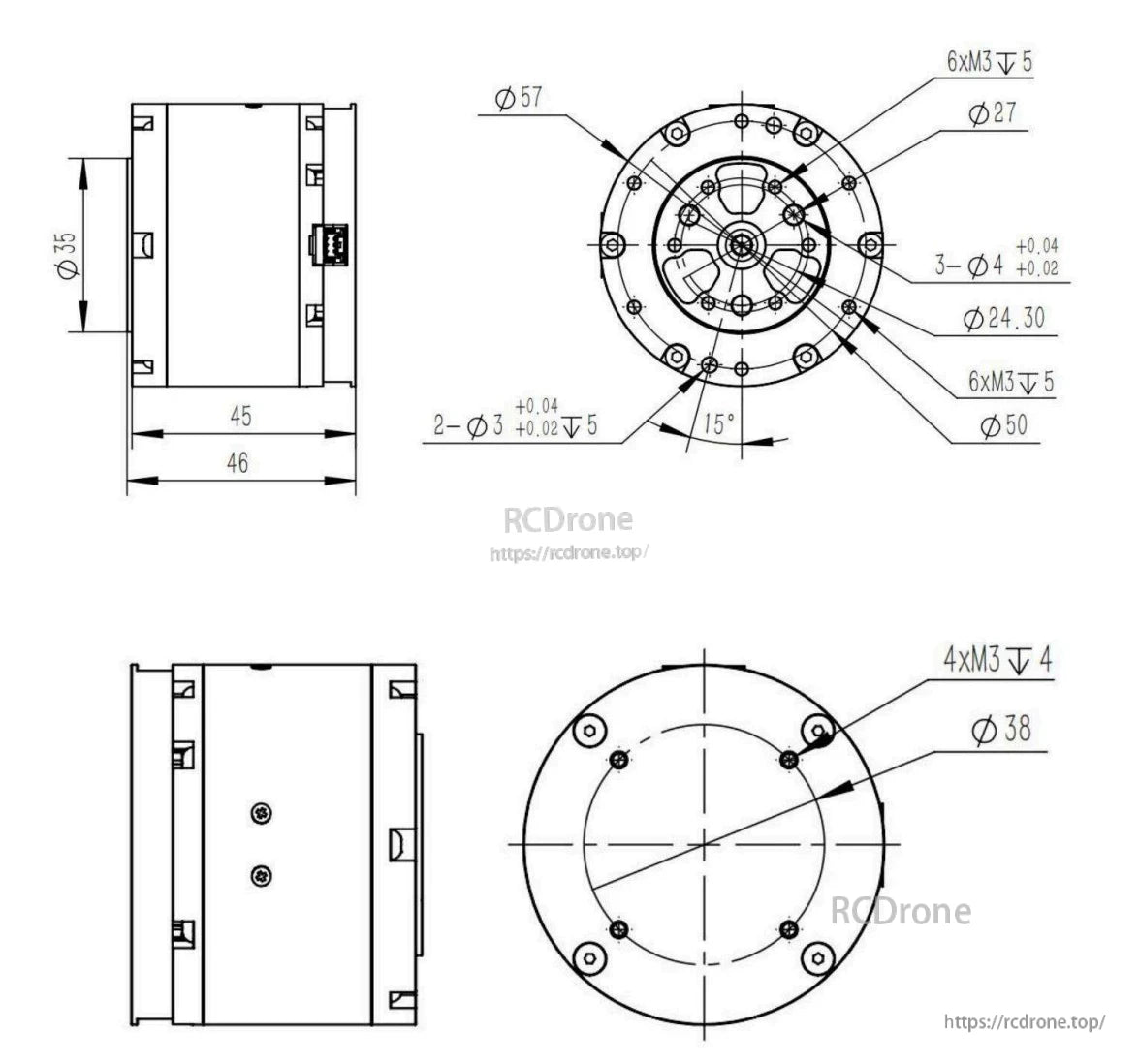
Especificaciones, dimensiones y dibujos mecánicos del motor de robot DAMIAO DM-J4310-2EC incluidos.
Related Collections




