




DFRobot SEN0142 MPU6050 Módulo IMU Giroscopio Acelerómetro 6 DOF con Procesador de Movimiento Digital I2C para Arduino & Robótica
DFRobot SEN0142 MPU6050 Módulo IMU Giroscopio Acelerómetro 6 DOF con Procesador de Movimiento Digital I2C para Arduino & Robótica
DFRobot
No se pudo cargar la disponibilidad de retiro
Descripción general
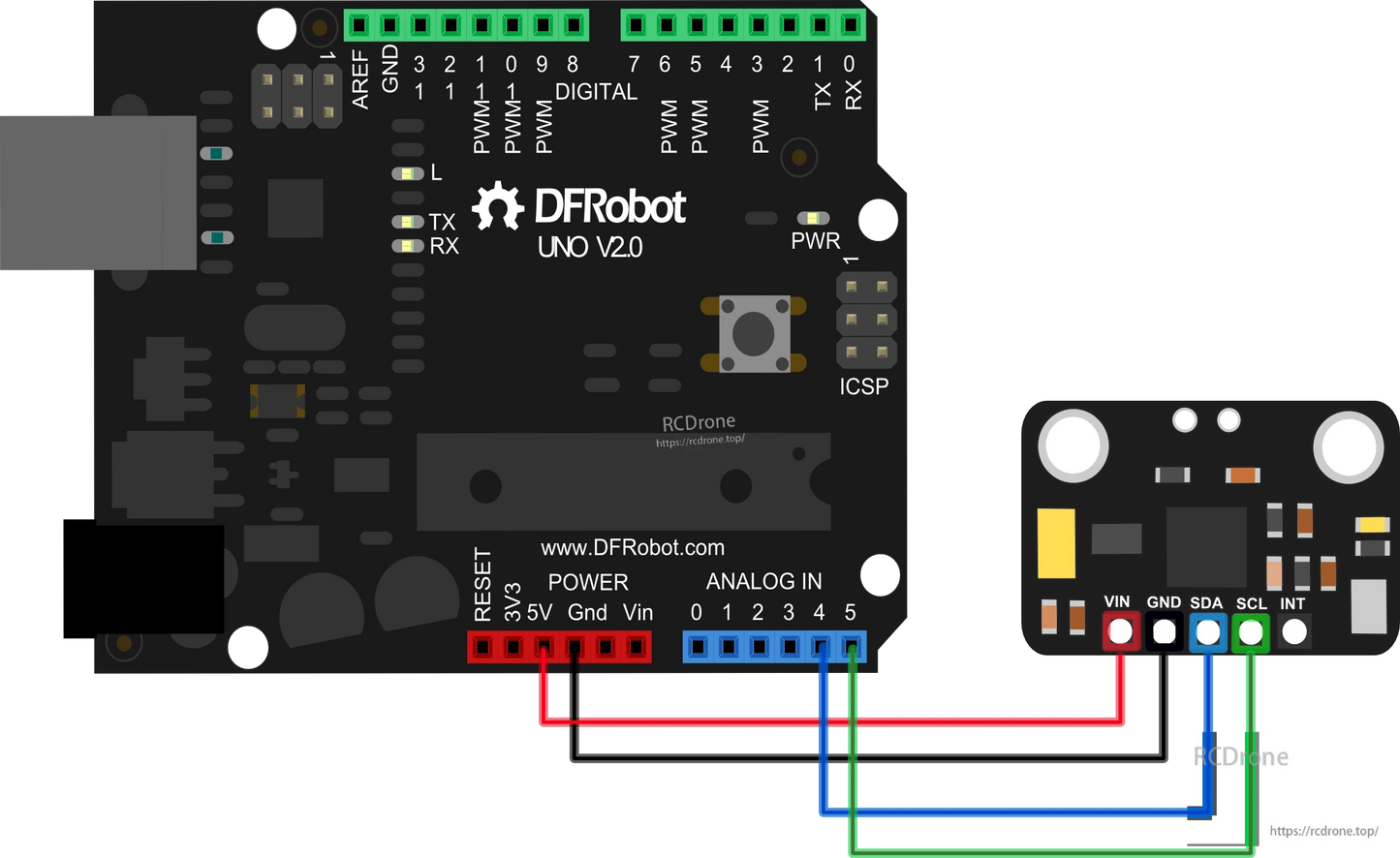
El DFRobot SEN0142 módulo IMU MPU6050 de 6 DOF integra un giroscopio de 3 ejes y un acelerómetro de 3 ejes en un solo chip, ofreciendo una detección de movimiento precisa para robótica, drones, dispositivos portátiles y proyectos de Arduino. Con un Procesador de Movimiento Digital (DMP), admite algoritmos avanzados de fusión de movimiento de 6 ejes y 9 ejes, permitiendo la salida de cuaterniones, ángulos de Euler y datos de sensores en bruto. Con un amplio rango de voltaje de entrada de 3V–5V, el MPU6050 se puede conectar directamente a Arduino y otros microcontroladores para el seguimiento de movimiento en tiempo real y la detección de gestos.
Características Clave
-
Combina giroscopio de 3 ejes y acelerómetro de 3 ejes en un solo chip
-
Rango de acelerómetro programable: ±2g, ±4g, ±8g, ±16g
-
Sensibilidad del giroscopio: ±250, ±500, ±1000, ±2000 dps
-
Procesador de Movimiento Digital (DMP) para fusión de movimiento y reconocimiento de gestos en la placa
-
Interfaz digital I2C que soporta formatos de matriz, cuaternión, Euler y datos en bruto
-
Calibración de sesgo &y brújula incorporada para mejorar la precisión
-
Compatible con Arduino y electrónica portátil a través de I2Cdevlib
Especificaciones
-
Tensión de trabajo: 3–5 V
Salida: Datos de MotionFusion digital I2C (6/9 ejes)
-
Acelerómetro: Rango programable de ±2g / ±4g / ±8g / ±16g
-
Giroscopio: Sensibilidad de ±250 / ±500 / ±1000 / ±2000 dps
-
Formato de datos: Matriz de rotación, cuaternión, ángulo de Euler, datos en bruto
-
Dimensiones: 14 × 21 mm
Aplicaciones
-
Detección de movimiento en robótica
-
Proyectos de electrónica Arduino &y DIY
-
Interacción Humano-Computadora (HCI)
-
Dispositivos portátiles y control por gestos
-
Sistemas de navegación y equilibrio (e.g., transportadores tipo Segway)
-
Estabilización de drones y seguimiento de movimiento
Detalles



Código de muestra
¡Por favor, descargue las bibliotecas para todos los sensores IMU primero!




- Al seleccionar una opción, se actualiza toda la página.
- Se abre en una nueva ventana.