


Controlador de vuelo BETAFPV F4 2-3S 20A AIO V1, Serial ELRS 2.4G, BEC 9V/5V, DJI O3 PMU de 6 pines
Controlador de vuelo BETAFPV F4 2-3S 20A AIO V1, Serial ELRS 2.4G, BEC 9V/5V, DJI O3 PMU de 6 pines
BETAFPV
No se pudo cargar la disponibilidad de retiro
Resumen
El BETAFPV F4 2-3S 20A AIO FC V1 es un controlador de vuelo AIO diseñado para construcciones de VTX digitales HD que utilizan baterías de 2-3S. Combina un ESC de 20A con una solución de BEC dual (9V@2A for DJI O3 y 5V@3A for dispositivos externos) para ayudar a mantener una potencia estable durante los cambios de aceleración. También cuenta con un conector PMU de 6 pines DJI O3 para una instalación sin soldadura y un puerto USB SH1.0 de 4 pines en la parte trasera para ajuste y mantenimiento.
Características Clave
- Voltaje de entrada: 2-3S
- Salidas BEC duales: 9V@2A (DJI O3) y 5V@3A (dispositivos externos)
- DJI O3 PMU de 6 pines para una instalación más fácil de VTX HD (sin soldadura para el conector)
- ESC integrado: 20A continuo, 25A pico; soporte de señal D-shot300 / D-shot600
- MCU: STM32F405RGT6 @ 168MHz
- Receptor a bordo: Serial ELRS 2.4G (protocolo CRSF)
- IMU (SPI): ICM42688P / ICM42605 (las notas gráficas muestran “@8K”)
- 16MB caja negra; barómetro; voltaje & detección de corriente
- Puerto USB reubicado en la parte trasera (SH1.0 4 pines)
- UART3 puede ser liberado (TX3/RX3) y la alimentación RX a bordo puede ser cortada a través de modificaciones de hardware descritas a continuación
Especificaciones
| Peso | 5.58g (sin conectores de motor y cable de alimentación); 5.92g (con conectores de motor) |
| Tamaño del agujero de montaje | 26mm x 26mm |
| CPU | STM32F405RGT6 (168MHz) |
| IMU de seis ejes (SPI) | ICM42688P / ICM42605 |
| Receptor (RX) | Receptor ELRS 2.4G Serial |
| Versión del firmware RX | BETAFPV AIO 2400 RX ELRS V3.3.0 |
| Antenna | Alambre esmaltado |
| Memoria Blackbox | 16MB |
| Sensores | Barómetro (BMP280 / DSP310); Voltaje & Corriente |
| 5V BEC | 5V 3A@8V supply * |
| 9V BEC | 9V 2A@8V supply * |
| Puerto USB | SH1.0 4 pines |
| Corriente de ESC incorporada | 20A continuo; pico 25A |
| Tensión de entrada de ESC | 2-3S |
| Versión del firmware de FC | Betaflight_4.4.1_BETAFPVF405 |
| Firmware de ESC | C_X_70_48_V0.19.2.hex (hardware BB51 Bluejay) |
| Soporte de señal de ESC | D-shot300, D-shot600 |
* La corriente de salida de BEC disminuirá a medida que la temperatura aumente.
Destacados de cableado / Pinout (de diagramas de placa)
- Conectores de batería: Batt+ (2-3S), Batt-
- Puerto VTX digital HD (conector); nota de VCC mostrada: 9V (Predeterminado) / 5V
- Pads I2C: SCL, SDA
- Pads UART mostrados: T1/R1, T6/R6, TX3/RX3, TX4/RX4; pad SBUS también mostrado
- Pads de zumbador: BUZZ+ y BUZZ-; pads de LED mostrados
- Marcado de barómetro: BMP280/DSP310
- Marcados relacionados con el receptor mostrados: SX1280/SX1281, ESP8285, antena WiFi, LED RX (Verde), LED FC (Azul)
- Marcados del diagrama inferior: botón BOOT de FC/Receptor, LED RGB 1 / LED RGB 2, 5V BEC, sensor de corriente a bordo
- Pads USB mostrados en el diagrama inferior: D-, D+, GND, USB 5V
- Marcado de MCU ESC mostrado en el diagrama inferior: EFM8BB51 (FW C_X_70); “20A MOS” mostrado alrededor de las áreas ESC; etiquetas ESC1/ESC2/ESC3/ESC4
Notas de configuración (texto mostrado en gráfico de cableado)
- Para VTX digital HD, UART4 requiere que la Configuración/MSP esté habilitada.
- Si se utiliza un receptor externo, configure UART1/6 para que se establezca como Serial RX.
- GPS: configure la entrada del sensor como “GPS” en UART1/6, luego habilite GPS en la pestaña GPS y seleccione el protocolo correcto para el módulo GPS.
- RX de protocolo SBUS: configure el modo de receptor como “Receptor basado en serie” y establezca el proveedor de receptor serial en “SBUS”.
- RX de protocolo CRSF: configure el modo de receptor como “Receptor basado en serie” y establezca el proveedor de receptor serial en “CRSF”.
- Ejemplos de VTX digital HD mostrados: Caddx Vista / Runcam Link VTX, Walksnail VTX, HDZero VTX.
- Ejemplos de RX de protocolo SBUS mostrados: Frsky XM+ / Futaba AC900 / Flysky RX2A Pro.
- Ejemplos de RX de protocolo CRSF mostrados: TBS Nano / ELRS Series RX.
- Nota mostrada: algunas unidades de VTX digital HD pueden incluir un receptor SBUS integrado (funciona con radio DJI). Al usar un receptor externo, el cableado SBUS al VTX digital puede no ser necesario.
Preguntas Frecuentes / Opciones de Hardware
- Corte de energía: Quitar el chip bead desconecta la fuente de alimentación; para reutilizar el receptor ELRS a bordo, suelda las almohadillas de soldadura juntas para restaurar la energía.
- Liberación de UART3: Quitar dos resistencias en las almohadillas de soldadura libera UART3 (izquierda: TX3, derecha: RX3). Para reconectar, suelda las almohadillas de soldadura juntas al reutilizar el receptor ELRS a bordo.
- Interruptor de voltaje (conector HD VTX): El voltaje predeterminado para el conector HD VTX es 9V. Para usar WalkSnail Avatar HD mini 1s y Lite, asegúrate de que la fuente de alimentación sea de 5V moviendo el chip bead de la posición de 9V a la posición de 5V (o usa soldadura en lugar del chip bead para alternar entre las almohadillas de 5V y 9V).
- Nota sobre la elección del motor: Evita motores por encima de 20,000KV.
Firmware / Descargas
Para preguntas sobre construcción, cableado o firmware, contacta https://rcdrone.top/ o [email protected].
- Firmware de FC (versión STM32F405): Betaflight_4.4.1_BETAFVF405
- Descarga de volcado de firmware & CLI: https://support.betafpv.com/hc/en-us/articles/21884915967513-CLI-for-F4-2-3S-20A-Flight-Controller-ELRS-V1-0-
- Lanzamiento de Betaflight 4.4.1: https://github.com/betaflight/betaflight/releases/tag/4.4.1
Notas de firmware de ESC
- Solución ESC BB51 basada en BLHeliSuite16714903 con firmware de ESC Bluejay.
- Soporta D-shot bidireccional y filtrado de RPM en Betaflight.
- Opciones de frecuencia PWM: 24kHz, 48kHz, 96kHz; configuración de fábrica predeterminada: 48kHz.
- 96kHz no se recomienda en las notas proporcionadas debido a posibles problemas de configuración de inactividad del motor.
- Advertencia proporcionada: no flashear el firmware con un intervalo más corto, ya que puede causar paradas y daños al controlador de vuelo.
- ESC-Configurator: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Versiones de firmware de Bluejay: https://github.com/bird-sanctuary/bluejay/releases (nota mostrada: elige C_X_70.HEX)
RX ELRS 2.4G Serial (notas de actualización de vinculación &)
- Utiliza el protocolo CRSF entre el receptor y el controlador de vuelo.
- Ingresa al estado de vinculación encendiendo/apagando tres veces (conecta y desconecta el controlador de vuelo tres veces).
- Indicación del modo de vinculación: parpadeo rápido doble del LED RX; vinculado: luz sólida.
- Métodos de actualización del receptor anotados: Wi-Fi o pasaje serial de Betaflight.
- Notas de actualización de pasaje mostradas: conecta el FC a la computadora, no conectes al Configurador de Betaflight; elige el objetivo “BETAFPV 2.4GHz AIO RX”; flashea usando el Pasaje de Betaflight en el Configurador de ExpressLRS.
- Guía de actualización de firmware: https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
Qué incluye
- 1 x F4 2-3S 20A AIO FC V1
- 4 x tornillo de máquina M2*10
- 4 x tornillo de nylon M2*10
- 4 x tuercas M2
- 4 x bola de absorción de choque
- 4 x conector en ángulo JST1.25mm
- 4 x conector recto JST1.25mm
- 1 x cable adaptador de 4 pines SH1.0
- 1 x adaptador de Type-C a SH1.0
- 1 x cable de alimentación XT30
- 1 x condensador de filtro
- 1 x cable de conector VTX de doble cabeza de 30mm
- 1 x cable de conector VTX de cabeza única de 60mm
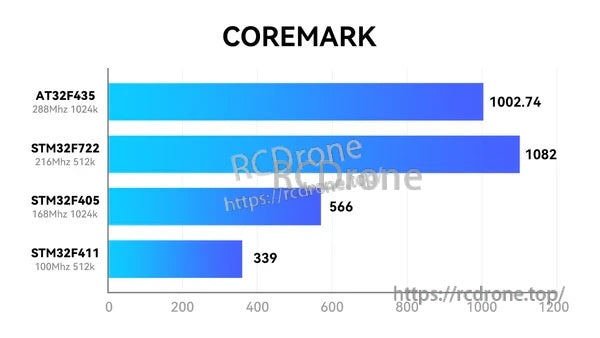
Referencia (gráfico de CoreMark mostrado en la gráfica del producto)
| AT32F435 (288MHz 1024k) | 1002.74 |
| STM32F722 (216MHz 512k) | 1082 |
| STM32F405 (168MHz 1024k) | 566 |
| STM32F411 (100MHz 512k) | 339 |
Detalles

Una solución AIO compacta de 2–3S que combina un controlador de vuelo F4 con un ESC de 20A para construcciones estilo whoop en HD.

El mapa de almohadillas en la parte superior clara ayuda a identificar el conector VTX digital de DJI, almohadillas, UARTs y conexiones de zumbador/LED antes de soldar.
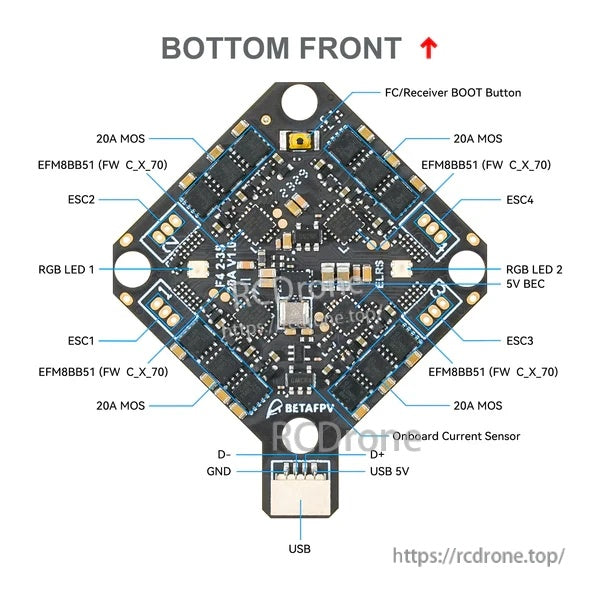
El diseño en la parte inferior destaca las secciones del ESC, el botón de arranque, las almohadillas de LED RGB, el sensor de corriente a bordo y los puntos de cableado USB.
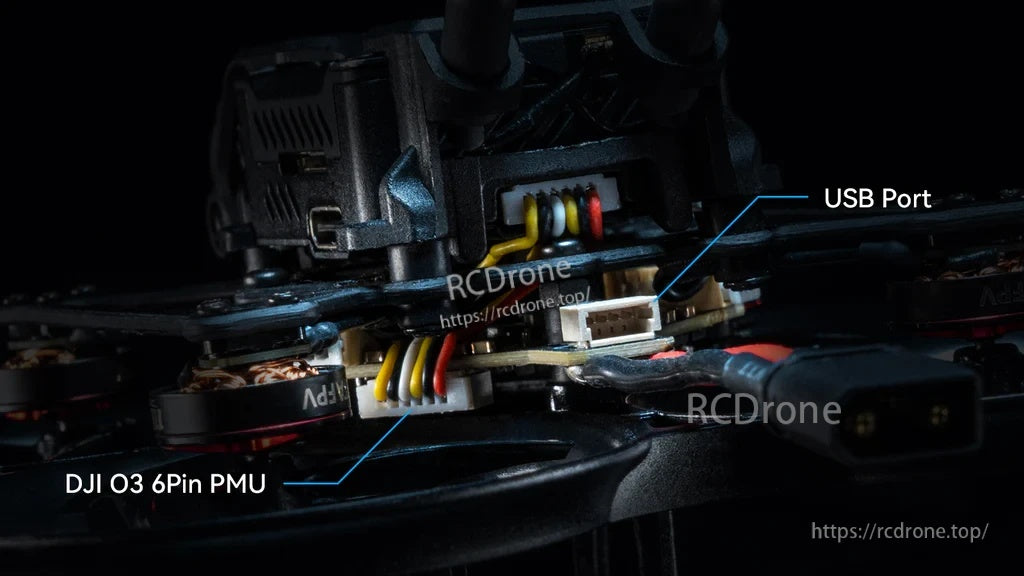
Un puerto USB montado en la parte trasera y el conector PMU O3 de DJI mantienen el cableado ordenado en marcos compactos.


El conector VTX HD se envía configurado a 9V por defecto, con una opción alternativa de 5V disponible a través de un pequeño cambio de soldadura.

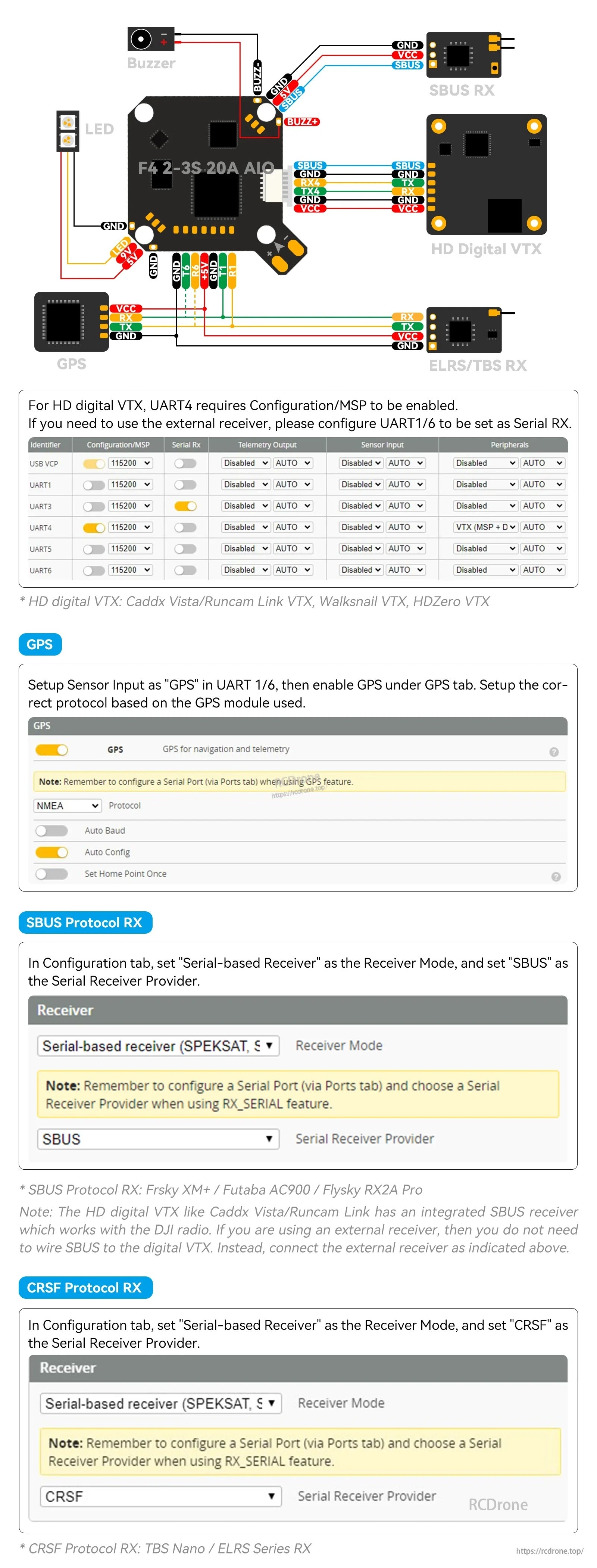
Un ejemplo de cableado y una guía de configuración del receptor Betaflight simplifican la configuración para construcciones de VTX digitales y la configuración del receptor en serie.

Related Collections


