Kit de desarrollo de drones programables Raspberry Pi F450-4B - Plataformas de drones industriales de código abierto Pixhawk DIY Ardupilot
Kit de desarrollo de drones programables Raspberry Pi F450-4B - Plataformas de drones industriales de código abierto Pixhawk DIY Ardupilot
RCDrone
No se pudo cargar la disponibilidad de retiro
Descripción general
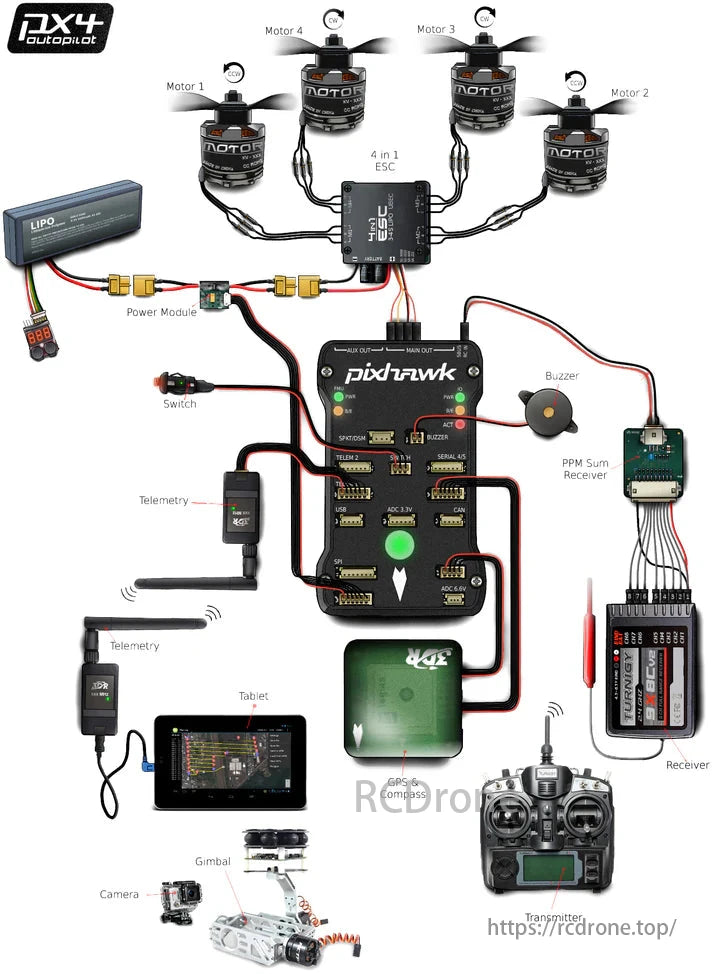
El F450-4B Dron Raspberry Pi es un avanzado Kit de dron para hacer uno mismo que combina un potente Frambuesa Pi 4B Ordenador de a bordo con la versatilidad Controlador de vuelo Pixhawk 2.4.8, lo que lo convierte en un sistema altamente personalizable y dron programable Plataforma. Esta Plataforma de drones de código abierto Admite herramientas de última generación como Dronekit-python, lo que permite a los desarrolladores crear misiones autónomas, transmisión de datos en tiempo real y aplicaciones de procesamiento de imágenes impulsadas por IA. Con un robusto marco de 450 mm, una cámara HD de 200 MP, una batería 3S de 5200 mAh para hasta 20 minutos de vuelo y modos de vuelo avanzados como retención de altitud, regreso al punto de origen y modo circular, el kit de drones F450 es la opción ideal para entusiastas, investigadores y educadores que buscan una experiencia innovadora en el desarrollo de drones.
Características principales
Hardware de alto rendimiento
- Frambuesa Pi 4B:Alimentado por un procesador de cuatro núcleos de 1,5 GHz y 64 bits, compatible con salida de video 4K y comunicación WiFi de alta velocidad para un funcionamiento confiable.
- Controlador de vuelo Pixhawk 2.4.8:Equipado con múltiples sensores integrados, lo que garantiza un control preciso de la actitud, el vuelo estacionario y la planificación de la misión.
- Apoyo a la expansión de la visiónCombinado con una cámara monocular y herramientas OpenCV, este kit satisface las necesidades de transmisión y procesamiento de imágenes en tiempo real.
Diversos modos de vuelo
- Mantener la altitud (AltHold):Mantiene una altitud de vuelo estable.
- Flotar:Proporciona un vuelo estacionario preciso.
- Regresar a Inicio (Regresar):Regresa automáticamente al punto de inicio en caso de pérdida de señal o batería baja.
- Aterrizaje (Tierra):Ejecuta un aterrizaje autónomo suave.
- Modo de estabilización:Ajusta la actitud de vuelo automáticamente.
- Modo círculo:Realiza vuelos circulares alrededor de un objetivo.
- Modo sin cabeza:Elimina las restricciones direccionales para un control más fácil.
- Regreso fuera de control:Regresa a una ubicación preestablecida cuando se pierde la señal.
- Aterrizaje de baja potencia:Aterriza de forma segura en condiciones de batería baja.
Transmisión de datos y procesamiento de imágenes
- Establece una red WiFi local a través de un punto de acceso incorporado sin necesidad de enrutadores externos, lo que permite la transmisión de datos e imágenes en tiempo real.
- Admite análisis y transmisión de video basados en OpenCV, ideal para monitoreo de imágenes y aplicaciones inteligentes.
Presupuesto
Parámetros del dron
| Parámetro | Detalles |
|---|---|
| Nombre | Kit de dron F450 |
| Distancia entre ejes | 450 mm |
| Peso | 1493 g (con batería y Raspberry Pi 4B) |
| Controlador de vuelo | Pixhawk 2.4.8 controladores de vuelo de código abierto |
| Computadora de a bordo | Frambuesa Pi 4B |
| Cámara | 200 MP HD 1080P |
| Soporte flotante | Módulo de flujo óptico y sensor de distancia láser |
| Módulo GPS | GPS m8n |
| Tiempo de vuelo | ~20 minutos (dependiendo del entorno y la misión) |
| Batería | Batería 3S de 5200 mAh (11,1 V) |
| Capacidad de carga útil | 500 gramos |
| Resistencia al viento | Nivel 3-4 |
| Motor | Cielo soleado A2212 |
| ESC | ESC Hobbywing 20A (compatible con baterías LiPo 3S-4S) |
| Hélices | Hélices autoblocantes T1045 |
| Altitud máxima | 2000 m (sin interferencias) |
| Alcance del vuelo | 1000 metros |
| Escenarios de vuelo | Interior / Exterior |
Especificaciones del controlador de vuelo Pixhawk 2.4.8
- Procesador: ARM STM32F427 Cortex M4 de 32 bits, 168 MHz, 256 KB de RAM
- Sensores:
- Giroscopio de 3 ejes y 6 grados de libertad L3GD20
- Acelerómetro/magnetómetro de 3 ejes y 14 bits LSM303D
- Acelerómetro/magnetómetro de 6 ejes MPU6000
- Barómetro de alta precisión MS5611
- Compatibilidad de control de tierra: QGroundControl, planificador de misiones
- Dimensiones:81 mm x 47 mm x 16 mm; Peso: 37 g
Especificaciones de Raspberry Pi 4B
- Conjunto de chips:Broadcom BCM2711
- UPC:Cuatro núcleos de 64 bits a 1,5 GHz
- GPU:Núcleo de vídeo VI de 500 MHz
- RAM:4 GB DDR4
- Interfaces: 2 puertos USB 3.0, 2 puertos USB 2.0
- Salida de vídeo:Dos puertos micro HDMI, compatible 4K@60Hz
- Comunicación:Bluetooth 5.0, Wi-Fi 5 (2,4/5 GHz)
- Fuente de alimentación:USB tipo C (5 V 3 A)
El paquete incluye
Configuración 1: Motor SunnySky A2212 con control remoto y telemetría FlySky i6
- Bastidor F450 con tren de aterrizaje
- Motores SunnySky A2212 (4 uds.)
- ESC Hobbywing 20A (4 piezas)
- Hélices autoblocantes T1045 (4 pares)
- Módulo GPS PIX M8n
- Placa amortiguadora de vibraciones
- Control remoto FlySky i6
- Batería 3S 5200mAh
- Cargador de equilibrio B3
- Soporte para GPS
- Módulo de telemetría de voltaje FS

Incluido: Correas de batería, bridas de nailon, almohadillas de madera, cinta adhesiva 3M, zumbador, herramientas de instalación
Vídeos de montaje y depuración, materiales relacionados proporcionados; póngase en contacto con el servicio de atención al cliente para obtener el código fuente.
Configuración 2: Motor SunnySky A2212 con Radiolink PRO
- Bastidor F450 con tren de aterrizaje
- Motores SunnySky A2212 (4 uds.)
- ESC Hobbywing 20A (4 piezas)
- Hélices autoblocantes 9450 (3 pares)
- FOTO.Kit de módulo GPS M8n
- Placa amortiguadora de vibraciones
- Radiolink PRO (receptor R9DS)
- Batería de control 3S 2200mAh
- Batería 3S 5200mAh
- Cargador de equilibrio B3
- Soporte para GPS

Incluido: Correas de batería, bridas de nailon, almohadillas de madera, cinta adhesiva 3M, zumbador, herramientas de instalación
Vídeos de montaje y depuración, materiales relacionados proporcionados; póngase en contacto con el servicio de atención al cliente para obtener el código fuente.
Conjunto de montaje del dron F450
Escenarios de aplicación
El kit de desarrollo de drones F450-4B es ideal para:
- Investigación y desarrollo de drones:Investigación universitaria, pruebas de controladores de vuelo, desarrollo de algoritmos.
- Aplicaciones inteligentes:Planificación de ruta, reconocimiento de objetivos y evitación de obstáculos.
- Experimentos educativos:Programación, ensamblaje de hardware y depuración.
- Uso de campo:Vuelos en interiores, topografía al aire libre, monitoreo agrícola y más.
Detalles
Plataforma de desarrollo de drones Raspberry Pi F450-4B
El F450 es un modelo de dron clásico y de uso común, que ofrece un montaje simple y conveniente, un alto rendimiento en relación costo-beneficio, una gran practicidad y es adecuado para que los principiantes comiencen rápidamente con las operaciones con drones.

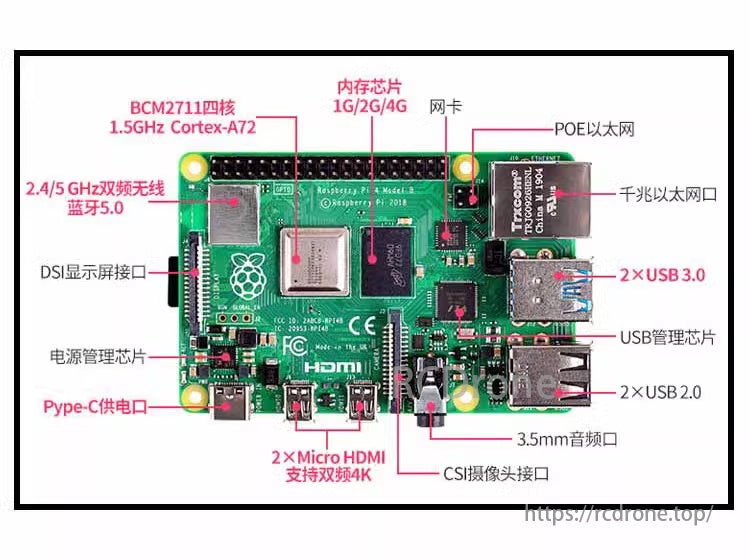
Raspberry Pi 4B actualizado
La potencia de procesamiento del hardware del Raspberry Pi 4B es significativamente mayor que la del 3B+.
La Raspberry Pi está equipada con el último sistema de código abierto. Ubuntu 20.04, ofreciendo una experiencia más fluida en comparación con el sistema Ubuntu Mate.

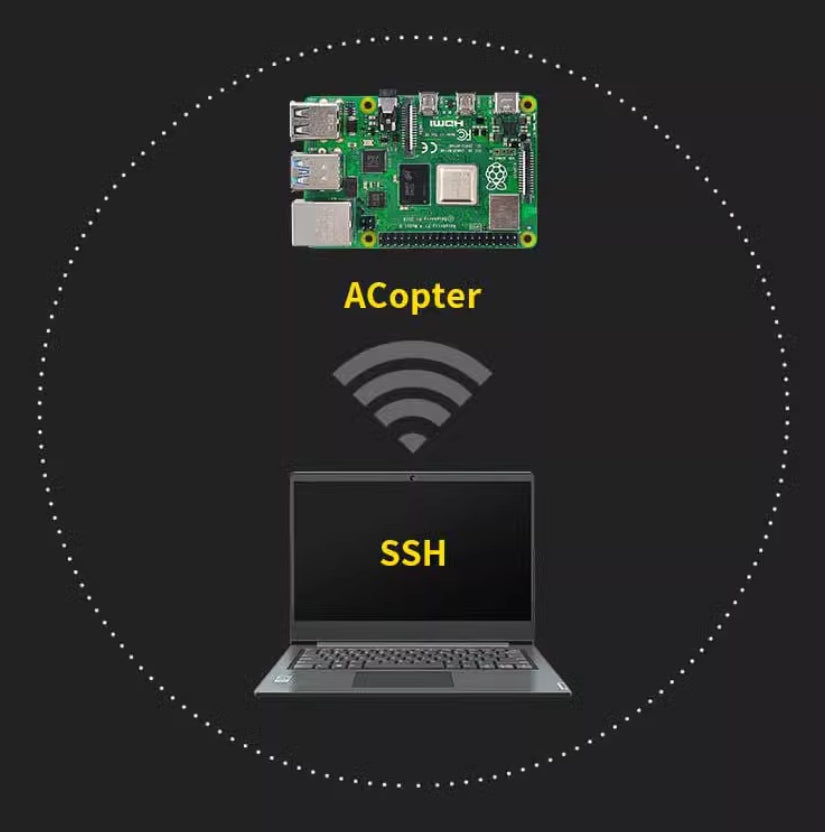
Punto de acceso WiFi habilitado por el sistema (Acopter)
Utilizando la capacidad WiFi de Raspberry Pi 4B, se crea un punto de acceso (Acopter) autoconstruido. La PC puede conectarse directamente al punto de acceso WiFi de 4B para formar una red local y usar comandos SSH para acceder de forma remota a Raspberry Pi. A diferencia del modelo 3B+ que requiere un enrutador para la configuración de la red, esta configuración es mucho más simple y fácil de usar para principiantes.
Procesamiento visual OpenCV
Se añade una cámara monocular que permite la transmisión de imágenes y el posprocesamiento. Las secuencias de vídeo se pueden capturar a través de Raspberry Pi y procesarse con herramientas como OpenCV. Las secuencias de vídeo HD en tiempo real también se pueden transmitir a una PC para su procesamiento o a un dispositivo móvil para su visualización.

Más interfaz de expansión
Raspberry Pi 4B ofrece una amplia gama de interfaces de expansión, incluidos dos puertos USB 3.0, dos puertos micro HDMI 4K, interfaces CSI y DSI, Gigabit Ethernet y una fuente de alimentación Tipo C, lo que proporciona una versatilidad excepcional para diversas aplicaciones.
Edición de cámara única
La edición de una sola cámara incluye una Raspberry Pi 4B y una cámara monocular, lo que permite la comunicación a través de un puerto serie con el controlador de vuelo. Admite tareas como procesamiento visual, programación en Python y comunicación. Esta versión es adecuada para usuarios con experiencia previa en el uso de Pixhawk, conocimientos básicos de Ubuntu (Linux), OpenCV, Raspberry Pi y comunicación en red de área local.
Además de las funciones básicas, la edición de cámara única admite la transmisión de imágenes y datos a través de WiFi y permite el control del dron a través de Dronekit-python programación.

Posicionamiento de flujo óptico
Control de vuelo estacionario en interiores con Dronekit-python en condiciones de posicionamiento de flujo óptico

Esta plataforma de desarrollo de drones admite ROS, Programación en Python, Reconocimiento de imágenes OpenCV, Transmisión de larga distancia 4G, y Aterrizaje guiado visual con código 2D de Aruco, lo que lo hace muy versátil e innovador.

Control remoto FlySky i6
Equipado con un receptor ia6b precargado con firmware de 10 canales, módulo de telemetría de voltaje y un alcance de control remoto de más de 1000 m, ideal para que los principiantes aprendan y practiquen.

Mando a distancia Radioenlace AT9S
Cuenta con 10 canales con un rango de control de más de 2000 m. Equipado con un módulo de telemetría que proporciona datos sobre el voltaje de la batería, el conteo de satélites GPS, la altitud de vuelo, las coordenadas, el modo de vuelo y más.

Preguntas frecuentes
1. ¿Puedo realizar un desarrollo secundario? ¿Puedo programar de forma independiente?
La respuesta es sí. Como ya hemos mencionado, Ardupilot es actualmente el sistema de control de vuelo de código abierto más utilizado y muchos modelos de drones nacionales e internacionales excelentes se han desarrollado basándose en este sistema.
El desarrollo secundario tiene principalmente dos direcciones: desarrollo del control de vuelo y expansión externa.
- Desarrollo del control de vuelo
Utilizamos Ardupilot, por lo que aprender el desarrollo de control de vuelo de código abierto implica principalmente estudiar el proyecto de código abierto Ardupilot.
- Se requieren sólidas habilidades de programación (el código fuente está en C++), junto con conocimientos de matemáticas avanzadas (matemáticas discretas, iteración, linealización), filtrado de Kalman y desarrollo integrado.
- Se necesita una base teórica sólida que lo prepare para trabajar en el desarrollo de sistemas no tripulados y en la investigación y desarrollo de control de vuelo.
Si desea centrarse en el desarrollo del control de vuelo, la mayor parte del trabajo debe realizarse en su computadora:
- Configurar el entorno de programación, descargar el código fuente del control de vuelo, estudiar su arquitectura y módulos funcionales, etc.
- Una vez familiarizado con el marco del código, puede comenzar a programar basándose en el código existente.
Comience con un modelo de control de vuelo básico y consulte el libro de texto de control de vuelo de Ardupilot que le proporcionamos para obtener orientación.
- Desarrollo de la expansión externa
La expansión externa le permite agregar dispositivos externos según sus tareas y escenarios a través de las interfaces reservadas del controlador de vuelo. Por ejemplo:
- Añade un módulo de flujo óptico para posicionamiento y vuelo estacionario en interiores.
- Añade un radar láser para evitar obstáculos.
- Utilice la telemetría para permitir el vuelo autónomo y la planificación de rutas.
- Instale una computadora a bordo (por ejemplo, Raspberry Pi) y use Dronekit-Python o ROS para programar el control del dron.
El objetivo de añadir una computadora a bordo es manejar tareas más complejas, como:
- Usando la cámara Raspberry Pi para reconocimiento visual (requiere OpenCV, YOLO, etc.).
- Combinando protocolos de comunicación para controlar el vuelo del dron.
- Transmitir datos de vuelo o vídeos de alta definición a través de redes.
Estas funciones no se pueden lograr confiando únicamente en el controlador de vuelo.
El estudio de la expansión externa se centra principalmente en las postulaciones, que es también la dirección de la mayoría de las competiciones a nivel nacional.Después de aprender, podrá explorar áreas críticas de los drones inteligentes, como el reconocimiento visual, la integración de IA con drones y más.
2. ¿Cuáles son los requisitos previos para el desarrollo independiente?
El aprendizaje sobre drones es un proceso gradual. Los sistemas de drones son interdisciplinarios e integradores, e involucran una amplia gama de áreas de conocimiento. Para aprender sobre el desarrollo de drones, se requieren las siguientes bases:
- Habilidades prácticas básicas, incluida la competencia en el uso de soldadores, diversos destornilladores y otras herramientas.
- Conocimientos básicos de electrónica: conceptos como voltaje, corriente, potencia, polaridad y señales.
- Conocimientos fundamentales de control de automatización: control PID, realimentación, señales digitales, señales analógicas, etc.
- Conocimientos básicos de informática: controladores, puertos serie, velocidades de transmisión, versiones de firmware, versiones de software.
- Conocimientos básicos de drones Pixhawk.
- Conocimientos básicos del sistema operativo Ubuntu.
- Competencia en lenguajes de programación: como C++ y Python.
¿Cómo hacer un dron con Respberry PI?