






Nuestros productos han pasado las certificaciones CE y ROHS, y la mayoría de ellos han solicitado patentes de apariencia y patentes de modelos de utilidad
Feetech SCS225-C006 - 7.4V 19kg 180° 0.192sec/60° 25T Control Serial BUS Servo Robot Arduin Doble Eje Shafe robot roborock iRobot Roomba robot aspirador Servo
Feetech SCS225-C006 - 7.4V 19kg 180° 0.192sec/60° 25T Control Serial BUS Servo Robot Arduin Doble Eje Shafe robot roborock iRobot Roomba robot aspirador Servo
Feetech
Precio habitual
$21.25 USD
Precio habitual
Precio de oferta
$21.25 USD
Precio unitario
por
Impuestos incluidos.
Los gastos de envío se calculan en la pantalla de pago.
No se pudo cargar la disponibilidad de retiro
ESPECIFICACIONES
Nombre de marca: Feetech
Origen: China continental
Material: Plástico
Tipo de plástico: PC
Piezas y accesorios de RC: Baterías - LiPo
Tamaño: 10*10*10
Para tipo de vehículo: Coches
Uso: Vehículos y juguetes de control remoto
Piezas/accesorios de actualización: Batería de litio
Dispositivos/periféricos de control remoto: Controlador remoto
Suministros de herramientas: Batería
Cantidad: 1 pieza
Parámetros técnicos: KV1100
Número de modelo: SCS225-C006
Atributos de tracción en las cuatro ruedas: Motores
Distancia entre ejes: Tornillos
Número de modelo: SCS225-C006
Tamaño: 45,23 mm x 24,73 mm x 35 mm
Peso: 55± 1g
Tipo de engranaje: Cobre
Ángulo límite: SIN límite
Rodamiento: Rodamientos de bolas
Estriado del engranaje de la bocina: 25T
Motor: Motor sin núcleo
Rango de voltaje de funcionamiento: 6-7,4 V
Par de parada máximo: 19,5 kg.cm@6V
Par nominal: 6,5 kg.cm@6V
Tipo de protocolo: Comunicación serie asíncrona semidúplex
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

Especializados en ODM y OEM y hechos a medida 1. Etiqueta o impresión de su logotipo
2.Cable de servo
3.Embalaje: bolsa de PE, caja de colores, caja de plástico con estructura
Su logotipo
4.Conector de cable
5.Servo personalizado de amplio voltaje de trabajo
2.Cable de servo
3.Embalaje: bolsa de PE, caja de colores, caja de plástico con estructura
Su logotipo
4.Conector de cable
5.Servo personalizado de amplio voltaje de trabajo
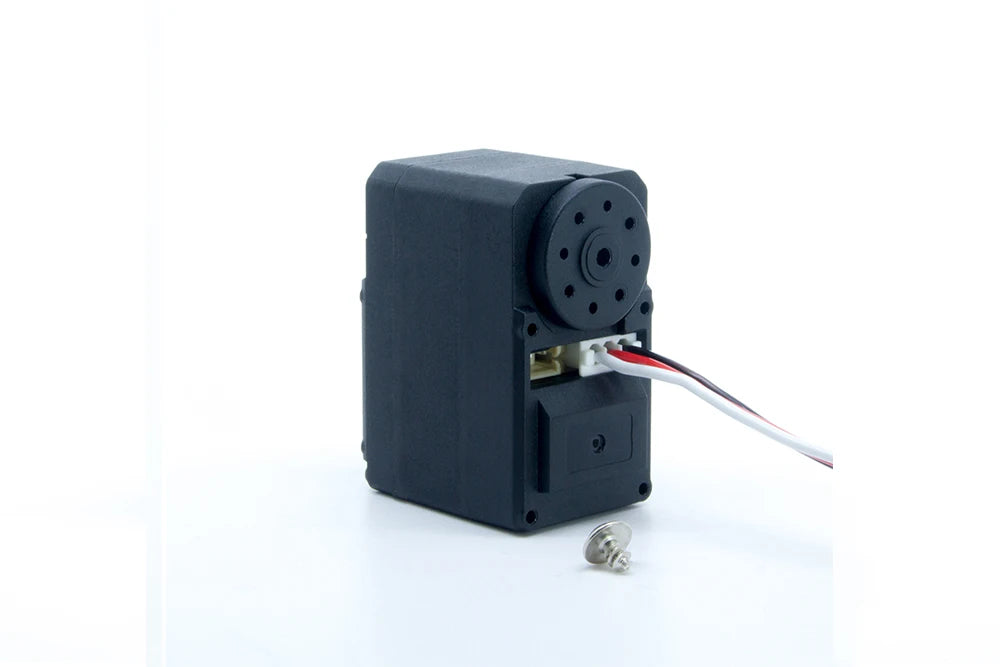
Uso del producto

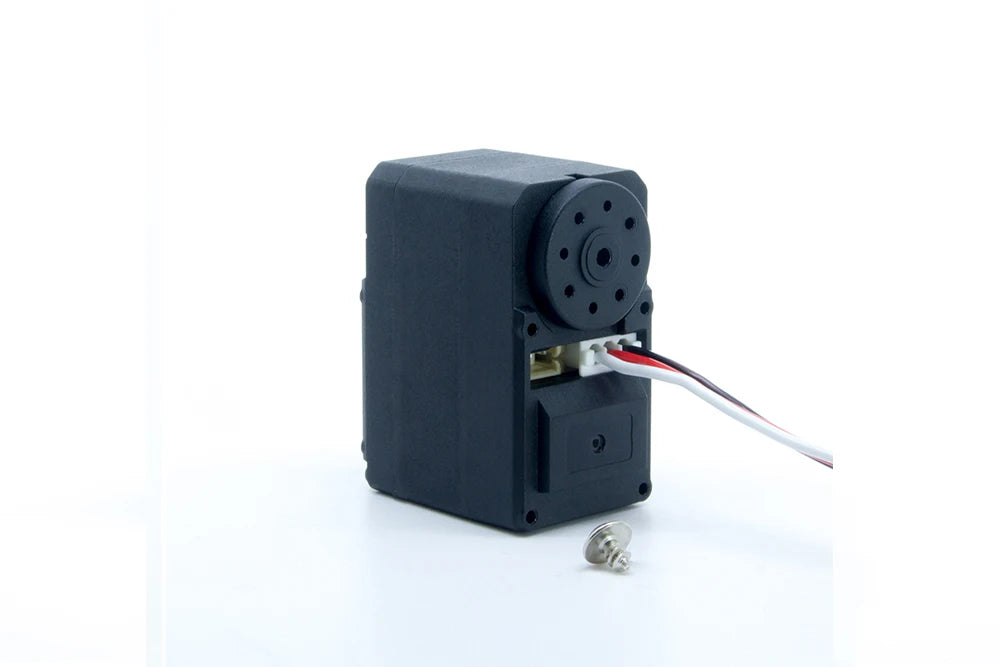
FEETECH 7.4V 20KG.CM Caja de plástico Codificador magnético de engranaje de metal Servo de bus serie TTL de doble eje
Imágenes detalladas




Imágenes detalladas
FEETECH 7.4V 20KG.CM Caja de plástico Codificador magnético de engranaje de metal Servo de bus serie TTL de doble eje
Función de control electrónico:
1. Función de inicio y parada de aceleración: se pueden configurar el valor de velocidad y aceleración, el efecto de movimiento es más suave.
2.Alta precisión, 360 grados posición absoluta Precisión de 4096 bits, la resolución de posición más alta es 0,088 grados, si el control es de 90 grados, ingrese 4096/360 * 90 = 1024, si el control es de 180 grados, ingrese 4096/360 * 180 = 2048, para calcular .
3. Hay cuatro cambios de modo de trabajo (modo 0 posición servo, modo 1 velocidad de bucle cerrado, modo 2 velocidad de bucle abierto, modo 3 servo de paso).
1)、 Modo 0: modo de ubicación, el modo predeterminado. En este modo, se puede realizar un control de ángulo absoluto de 360 grados. Admite movimiento de aceleración.
2)、Modo 1: Velocidad de circuito cerrado, en la interfaz de programación, el modo de operación se establece en 1, cambie al modo de velocidad de circuito cerrado e ingrese la velocidad correspondiente en la columna de velocidad para ejecutar .
3)、Modo 2: Velocidad de bucle abierto, en la interfaz de programación, el modo de operación se establece en 2, cambie al modo de velocidad de bucle abierto e ingrese el tiempo correspondiente en la columna de tiempo para ejecutar.
4)、Mode3:Modo de pasos: en la interfaz de programación, el límite de ángulo máximo/mínimo se establece en 0 y el modo de operación se establece en 3. Cambie al modo de pasos. Ingrese la posición en la barra de posiciones para avanzar hacia la posición objetivo. Haga clic en la posición nuevamente para continuar avanzando en la misma dirección.
4、Modo de giro múltiple, control absoluto y retroalimentación de 360 grados, con la mayor precisión, el control de posición absoluto puede ser de más o menos 7 vueltas, pero el número de ciclos de energía no se guarda, solo se retiene el valor de retroalimentación de posición absoluta.
5、Calibración con una tecla, instalación en ángulo de 360 grados en cualquier posición, (entrada de dirección 40 (decimal) 128 (decimal)) La posición actual de corrección de una tecla es la media (2048 (decimal)).
6、Nivel de comunicación TTL, comunicación asíncrona semidúplex, soporte de protocolo de bus para ajustar los parámetros de lectura y escritura y agregar función de lectura síncrona (envíe una instrucción para recibir la instrucción de lectura de cada servo en el bus por turno).
7、Protecciones múltiples (sobrecarga, sobrecorriente, sobretensión, sobrecalentamiento, configuración de interruptor, cambio de parámetros de condición)
1)、Protección de sobrecarga: a través de la detección de posición, durante el movimiento desde la posición inicial a la posición objetivo, cuando se detecta que la posición actual no es la posición objetivo después de encontrar el bloqueo de obstáculos, la fuerza de descarga dura 2S (20% de la fuerza de bloqueo predeterminada). Hasta que se active un nuevo comando, libere protección
2) 、 Protección contra sobrecorriente: a través del valor actual establecido, verifique si la corriente alcanza el valor actual establecido. Cuando alcance el valor actual establecido, libere la fuerza (el par predeterminado es 0). Hasta que se active un nuevo comando, libere protección
3)、Protección contra sobrevoltaje: detecta el valor de voltaje actual. Si excede el valor de voltaje establecido, la alarma mostrará sobrevoltaje.
4)、Protección contra sobrecalentamiento: detecta la temperatura actual del motor. Si la temperatura excede el valor establecido, la alarma mostrará sobrecalentamiento.
8: Retroalimentación múltiple:
1)Retroalimentación de carga: la salida de control de corriente controla el ciclo de trabajo de voltaje del motor, y la escala completa es 1000 = 100% de salida de torque.
2)Retroalimentación de corriente: la corriente de trabajo del servo, 1 = 6,5 mA
3)Retroalimentación de voltaje: el voltaje de trabajo del servo, 70=7 V, 0,1 V
4)Retroalimentación de temperatura: temperatura de trabajo interna del servo actual (medición de temperatura)。
5)Retroalimentación de velocidad: retroalimentación de la velocidad de rotación actual del motor y el número de pasos en unidad de tiempo (por segundo)
9. Abra los parámetros PID.
1. Función de inicio y parada de aceleración: se pueden configurar el valor de velocidad y aceleración, el efecto de movimiento es más suave.
2.Alta precisión, 360 grados posición absoluta Precisión de 4096 bits, la resolución de posición más alta es 0,088 grados, si el control es de 90 grados, ingrese 4096/360 * 90 = 1024, si el control es de 180 grados, ingrese 4096/360 * 180 = 2048, para calcular .
3. Hay cuatro cambios de modo de trabajo (modo 0 posición servo, modo 1 velocidad de bucle cerrado, modo 2 velocidad de bucle abierto, modo 3 servo de paso).
1)、 Modo 0: modo de ubicación, el modo predeterminado. En este modo, se puede realizar un control de ángulo absoluto de 360 grados. Admite movimiento de aceleración.
2)、Modo 1: Velocidad de circuito cerrado, en la interfaz de programación, el modo de operación se establece en 1, cambie al modo de velocidad de circuito cerrado e ingrese la velocidad correspondiente en la columna de velocidad para ejecutar .
3)、Modo 2: Velocidad de bucle abierto, en la interfaz de programación, el modo de operación se establece en 2, cambie al modo de velocidad de bucle abierto e ingrese el tiempo correspondiente en la columna de tiempo para ejecutar.
4)、Mode3:Modo de pasos: en la interfaz de programación, el límite de ángulo máximo/mínimo se establece en 0 y el modo de operación se establece en 3. Cambie al modo de pasos. Ingrese la posición en la barra de posiciones para avanzar hacia la posición objetivo. Haga clic en la posición nuevamente para continuar avanzando en la misma dirección.
4、Modo de giro múltiple, control absoluto y retroalimentación de 360 grados, con la mayor precisión, el control de posición absoluto puede ser de más o menos 7 vueltas, pero el número de ciclos de energía no se guarda, solo se retiene el valor de retroalimentación de posición absoluta.
5、Calibración con una tecla, instalación en ángulo de 360 grados en cualquier posición, (entrada de dirección 40 (decimal) 128 (decimal)) La posición actual de corrección de una tecla es la media (2048 (decimal)).
6、Nivel de comunicación TTL, comunicación asíncrona semidúplex, soporte de protocolo de bus para ajustar los parámetros de lectura y escritura y agregar función de lectura síncrona (envíe una instrucción para recibir la instrucción de lectura de cada servo en el bus por turno).
7、Protecciones múltiples (sobrecarga, sobrecorriente, sobretensión, sobrecalentamiento, configuración de interruptor, cambio de parámetros de condición)
1)、Protección de sobrecarga: a través de la detección de posición, durante el movimiento desde la posición inicial a la posición objetivo, cuando se detecta que la posición actual no es la posición objetivo después de encontrar el bloqueo de obstáculos, la fuerza de descarga dura 2S (20% de la fuerza de bloqueo predeterminada). Hasta que se active un nuevo comando, libere protección
2) 、 Protección contra sobrecorriente: a través del valor actual establecido, verifique si la corriente alcanza el valor actual establecido. Cuando alcance el valor actual establecido, libere la fuerza (el par predeterminado es 0). Hasta que se active un nuevo comando, libere protección
3)、Protección contra sobrevoltaje: detecta el valor de voltaje actual. Si excede el valor de voltaje establecido, la alarma mostrará sobrevoltaje.
4)、Protección contra sobrecalentamiento: detecta la temperatura actual del motor. Si la temperatura excede el valor establecido, la alarma mostrará sobrecalentamiento.
8: Retroalimentación múltiple:
1)Retroalimentación de carga: la salida de control de corriente controla el ciclo de trabajo de voltaje del motor, y la escala completa es 1000 = 100% de salida de torque.
2)Retroalimentación de corriente: la corriente de trabajo del servo, 1 = 6,5 mA
3)Retroalimentación de voltaje: el voltaje de trabajo del servo, 70=7 V, 0,1 V
4)Retroalimentación de temperatura: temperatura de trabajo interna del servo actual (medición de temperatura)。
5)Retroalimentación de velocidad: retroalimentación de la velocidad de rotación actual del motor y el número de pasos en unidad de tiempo (por segundo)
9. Abra los parámetros PID.
Related Collections






