


Módulo de Motor de Alto Par HTDW-5047 50mm 12-48V Encoder de 14 bits Relación 9/20/36
Módulo de Motor de Alto Par HTDW-5047 50mm 12-48V Encoder de 14 bits Relación 9/20/36
HIGH TORQUE
No se pudo cargar la disponibilidad de retiro
Descripción
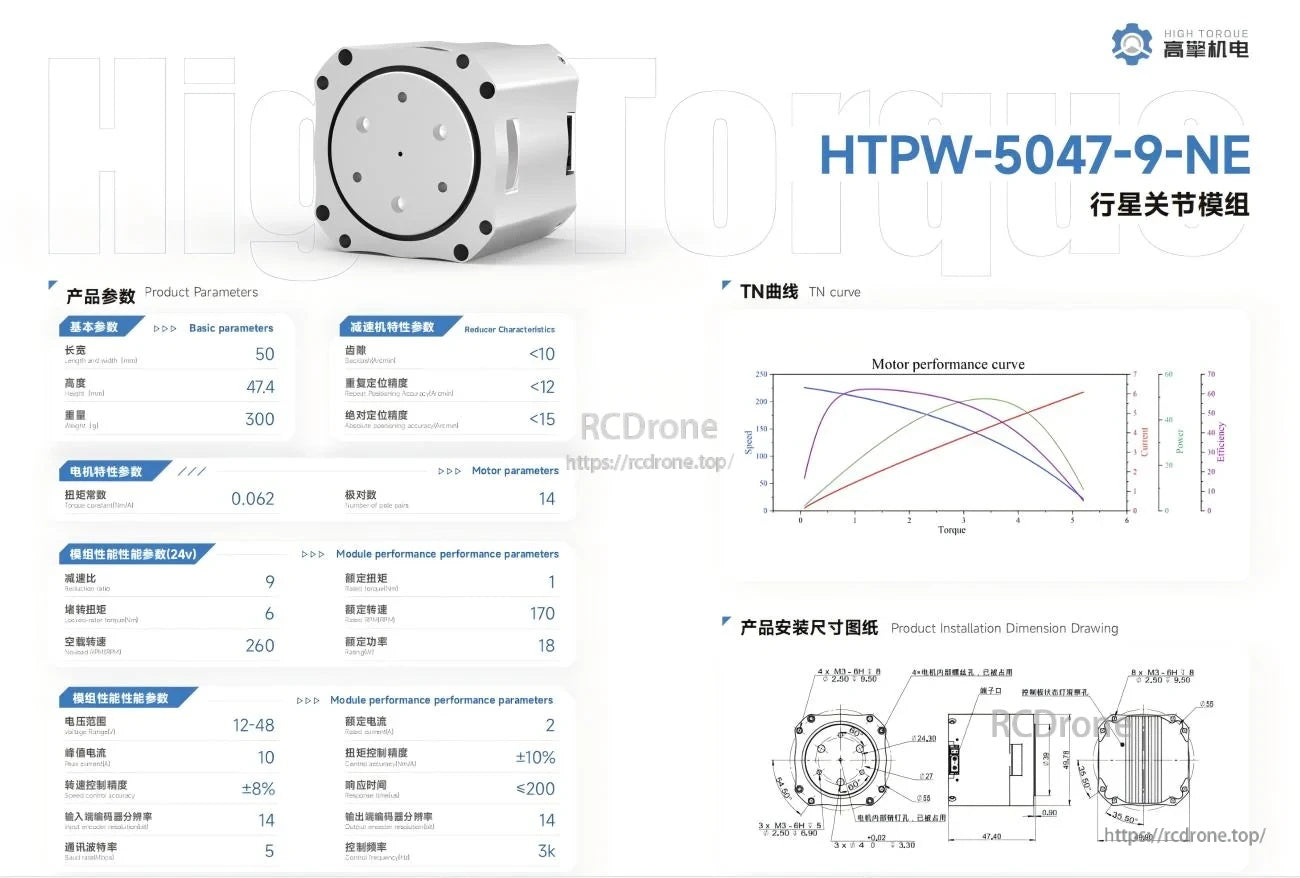
El MOTOR DE ALTO PAR HTDW-5047 es una serie de módulos de motor compactos de alto par que se ofrece en tres relaciones de reducción (9 / 20 / 36). Presenta una resolución de codificador de entrada/salida de 14 bits, un rango de voltaje de 12-48V y una frecuencia de control de 3kHz para el control de movimiento y las articulaciones de robótica.
Características clave
- Modelos: HTDW-5047-9-NE / HTDW-5047-20-NE / HTDW-5047-36-NE
- Baja retroalimentación: <10 Arcmin
- Precisión de posicionamiento repetido: <12 Arcmin; precisión de posicionamiento absoluto: <15 Arcmin
- Resolución del encoder: 14-bit (entrada) y 14-bit (salida)
- Tasa de baudios: 5 Mbps; tiempo de respuesta: ≤200 us
Especificaciones
| Parámetro | HTDW-5047-9-NE | HTDW-5047-20-NE | HTDW-5047-36-NE |
|---|---|---|---|
| Longitud y ancho | 50mm | 50mm | 50mm |
| Altura | 47.4mm | 47.4mm | 47mm |
| Peso | 300g | 322g | 321g |
| Retroceso | <10 Arcmin | <10 Arcmin | <10 Arcmin |
| Precisión de repetición de posicionamiento | <12 Arcmin | <12 Arcmin | <12 Arcmin |
| Precisión de posicionamiento absoluto | <15 Arcmin | <15 Arcmin | <15 Arcmin |
| Constante de par | 0.062 Nm/A | 0.062 Nm/A | 0.062 Nm/A |
| Número de pares de polos | 14 | 14 | 14 |
| Relación de reducción | 9 | 20 | 36 |
| Par de bloqueo | 6 Nm | 12 Nm | 21 Nm |
| RPM sin carga | 260 RPM | 130 RPM | 60 RPM |
| Par nominal | 1 Nm | 2 Nm | 4 Nm |
| RPM nominal | 170 RPM | 110 RPM | 40 RPM |
| Clasificación | 18 W | 23 W | 17 W |
| Rango de voltaje | 12-48V | 12-48V | 12-48V |
| Corriente de pico | 10 A | 10 A | 10 A |
| Precisión de control de velocidad | ±8% | ±15% | ±15% |
| Resolución del codificador de entrada | 14 bits | 14 bits | 14 bits |
| Tasa de baudios | 5 Mbps | 5 Mbps | 5 Mbps |
| Corriente nominal | 2 A | 2 A | 2 A |
| Precisión de control | ±10% | ±15% | ±15% |
| Tiempo de respuesta | ≤200 us | ≤200 us | ≤200 us |
| Resolución del codificador de salida | 14 bits | 14 bits | 14 bits |
| Frecuencia de control | 3 kHz | 3 kHz | 3 kHz |
Para orientación en la selección y soporte postventa, contacte [email protected] or visite https://rcdrone.top/.
Aplicaciones
- Robots humanoides
- Brazos robóticos
- Exoesqueletos
- Robots cuadrúpedos
- Vehículos AGV
- Robots ARU
Manuales
- HTDW-5047-9-NE Asistente de depuración de motor de ALTO PAR Manual del usuario (PDF)
- HTDW-5047-20-NE Asistente de depuración de motor de ALTO PAR Manual del usuario (PDF)
- HTDW-5047-36-NE Asistente de depuración de motor de ALTO PAR Manual del usuario (PDF)
- HTDW-5047-9-NE Manual de depuración (PDF)
- HTDW-5047-20-NE Manual de depuración (PDF)
- HTDW-5047-36-NE Manual de depuración (PDF)
- HTDW-5047-9-NE Análisis de protocolo 1.2 fdcan (PDF)
- HTDW-5047-20-NE Análisis de protocolo 1.2 fdcan (PDF)
- HTDW-5047-36-NE 1.2 Análisis del Protocolo fdcan (PDF)
- Modelo 3D del Motor HTDW-5047-9-NE (STP, ZIP)
- Modelo 3D del Motor HTDW-5047-20-NE (STP, ZIP)
- Modelo 3D del Motor HTDW-5047-36-NE (STP, ZIP)
- Manual del Usuario HTDW-5047 (PDF)
Detalles

La serie HTDW-5047 combina un factor de forma compacto de 50 mm con alto torque para juntas robóticas y control de movimiento.
Elija la versión de reducción 9:1 cuando se priorice una mayor velocidad manteniendo la misma huella del módulo.
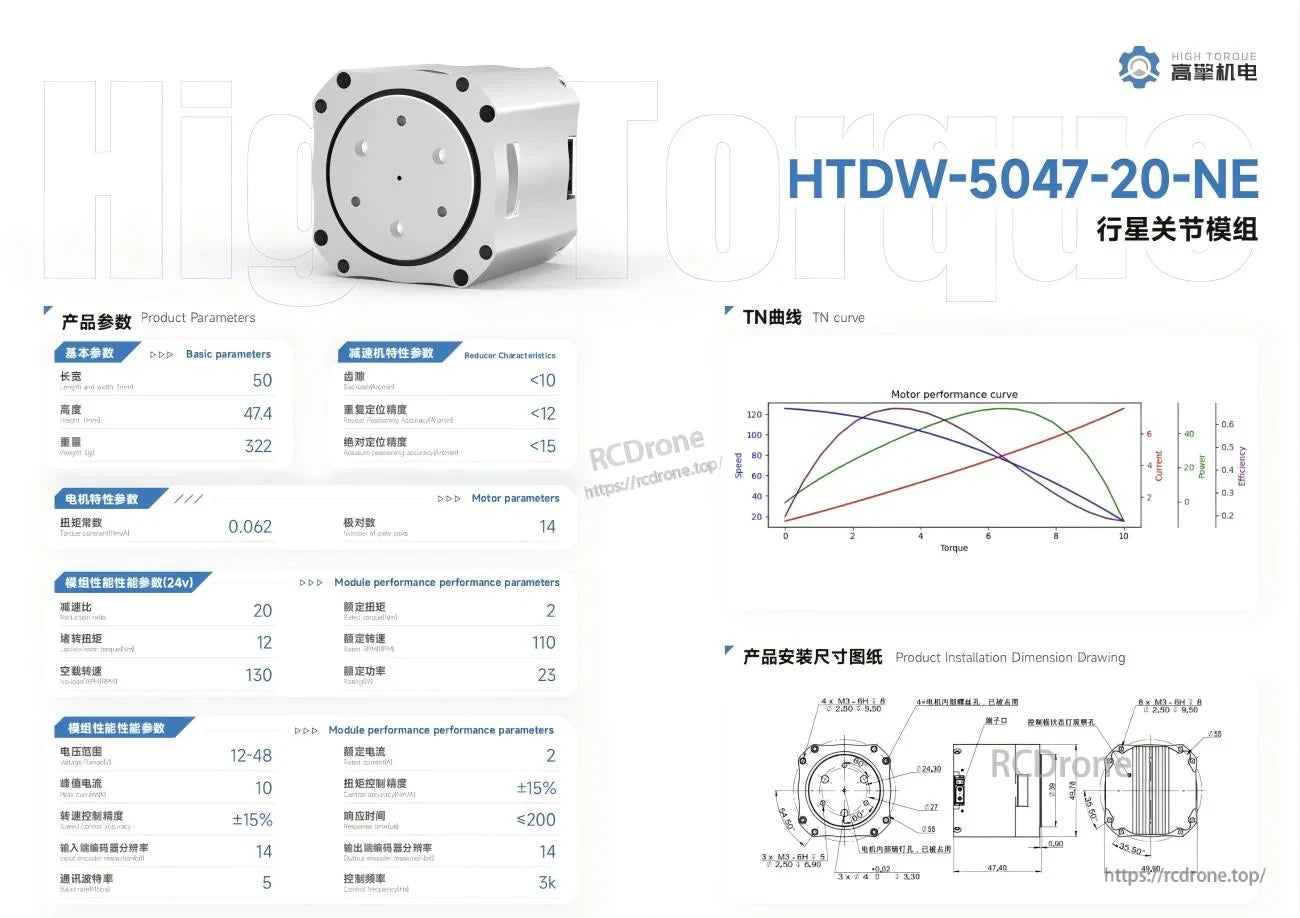
La opción de reducción 20:1 equilibra velocidad y torque para juntas y actuadores robóticos de propósito general.
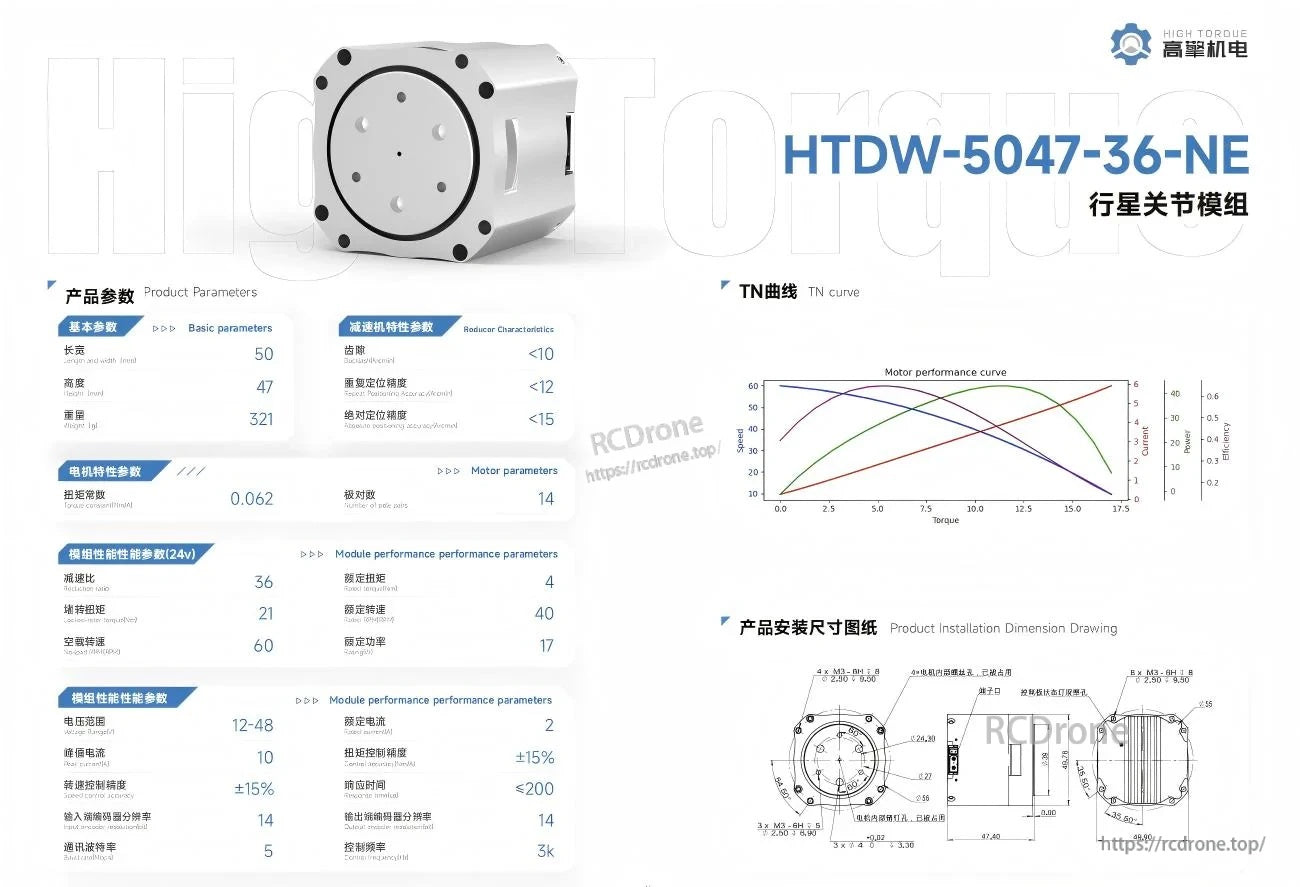
La variante de reducción 36:1 es adecuada para juntas de baja velocidad y alto torque donde la posicionamiento preciso es crítico.
Related Collections


